

Частотные методы Приближенное определение показателей качества по виду р() (Косвенный метод)
Близким по виду вещественным характеристикам Р() соответствуют близкие по виду переходные характеристики h(t).
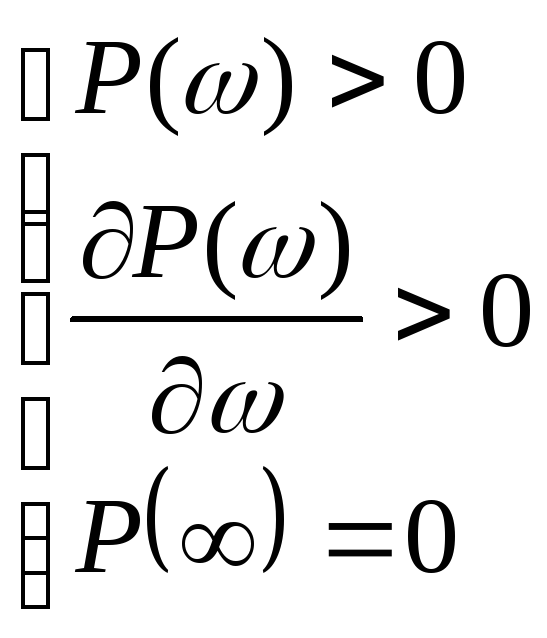
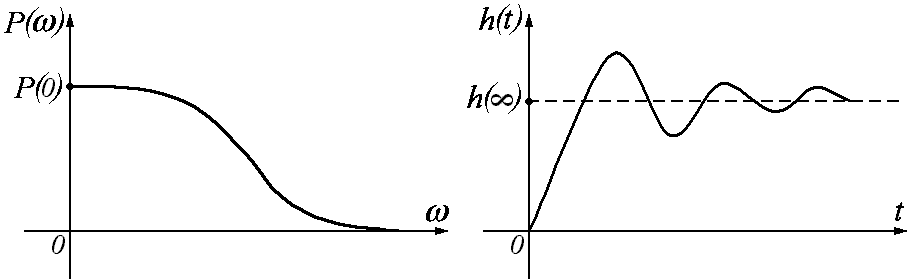
При косвенных оценках вещественной характеристики Р() ограничиваются исследованием спектра частот П, при которых вещественная действительная характеристика Р() имеет положительное значение.
О тбрасываемая часть при частотах свышеПвлияет на начало переходной характеристикиh(t).
![]()
Е
сли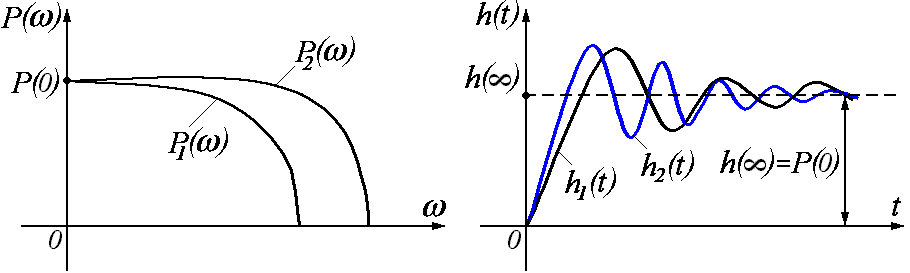
 ,
гдеп –
произвольное число, то
,
гдеп –
произвольное число, то
 .
Это означает следующее: если рассмотреть
две характеристики, то
.
Это означает следующее: если рассмотреть
две характеристики, то
вещественной частотной характеристике с захватом наибольших спектров частот (более широкая переходная характеристика) соответствует менее длительный переходный процесс. Чем шире Р(), тем быстрее происходит затухание, т.е. тем меньше время переходного процесса.
Установившееся значение h() соответствует значению вещественной частотной характеристики при частоте =0
![]() .
.
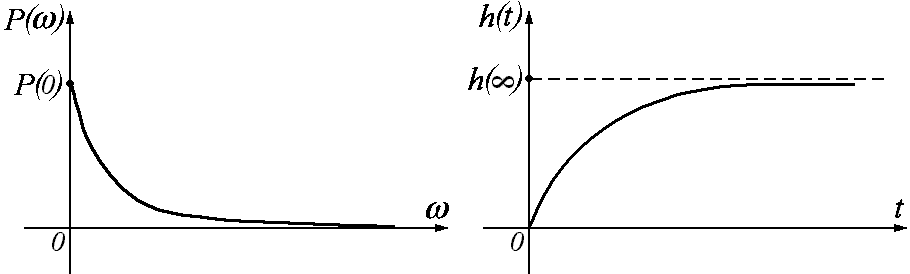
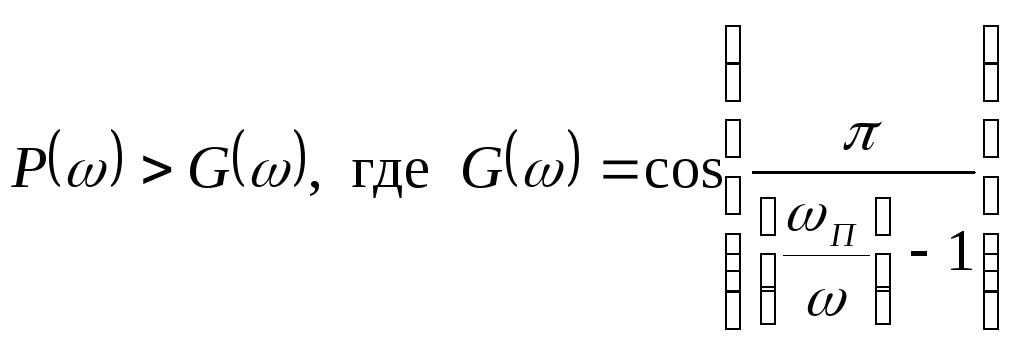
Если вещественная частотная характеристика Р() является монотонно убывающей функцией и Р()=0, то переходная характеристика имеет апериодический характер. Для апериодического процесса
В
![]() .
.
Если Р() - является положительной невозрастающей функцией, то переходная характеристика имеет вид затухающих колебаний:

П
![]() .
.
Если вещественная характеристика Р() имеет явно выраженный max
![]() ,
,
то
переходная характеристика будет иметь
вид затухающих колебаний и перерегулирование
![]() .
.
Общим условием для немонотонности переходной характеристики (колебательности) является: частотная характеристика Р() на каком-то этапе должна быть меньше G(), которая определяется как
 .
.
Здесь
![]() - наибольшее целое число от деления.
- наибольшее целое число от деления.
Е
слиР() претерпевает разрыв, то система находится на границе устойчивости.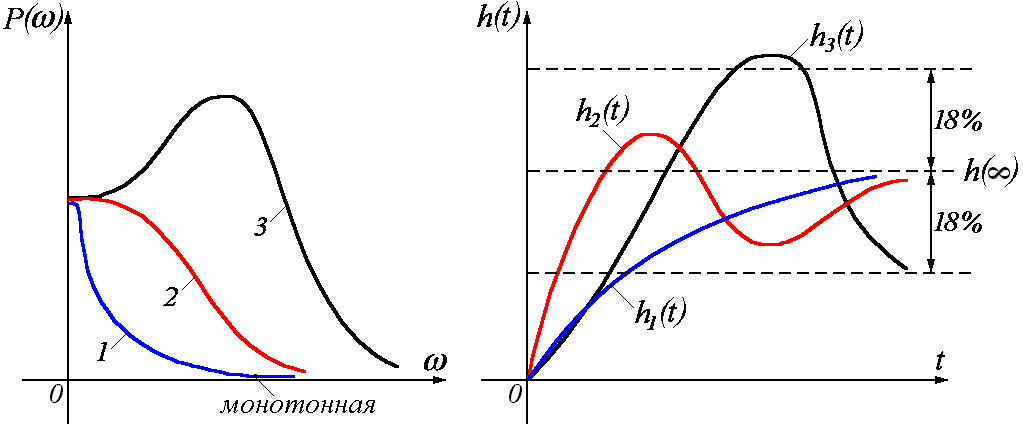
Склонность к колебаниям (hmax) тем выше, чем больше пик Pmax.
Для монотонного (апериодического переходного процесса) время переходного процесса составляет
![]() .
.
Если Р() может быть аппроксимирована трапецией вида
т

![]() .
.
Е
сли вещественную характеристикуР() можно разложить на ряд трапеций, то по параметрам трапеций можно определить перерегулирование по ординатам этих трапеций. Все трапеции должны быть прямоугольные.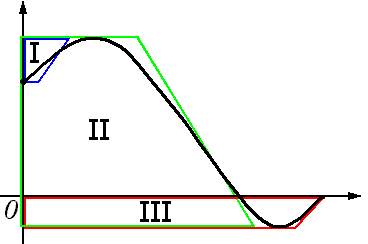
 ,
,
где Pk() - значение высоты трапеции, имеющей на осях Р(), - положительное значение, Pi() - значение высоты трапеции, имеющей на осях Р(), - отрицательное значение.
Построение вещественной частотной характеристики с использованием
ЛАЧХ разомкнутой системы и номограмм
Рассмотрим структурную схему:
П
![]()
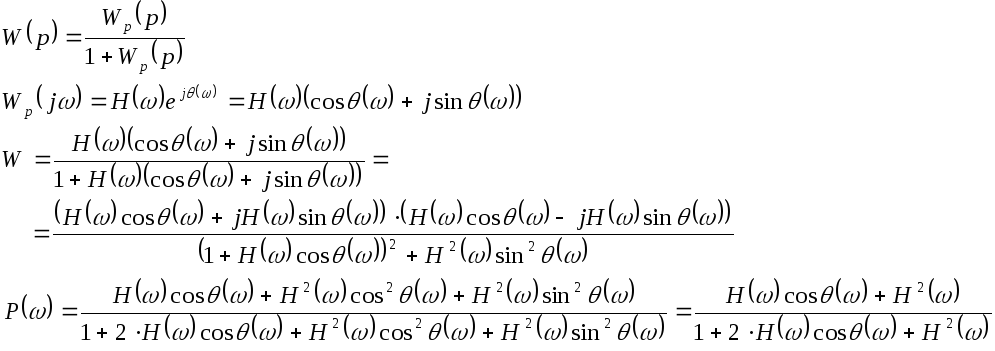
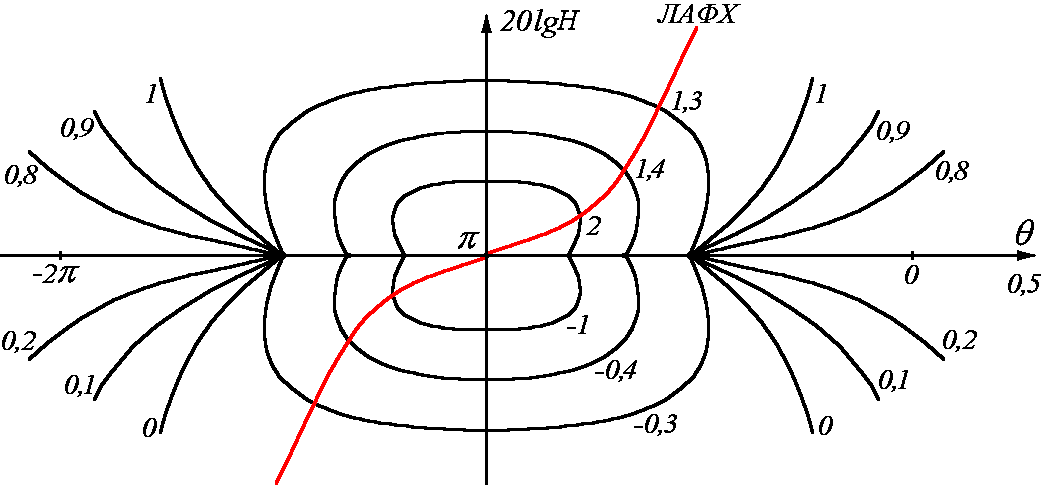
Данному уравнению на комплексной плоскости соответствуют кривые Р()=const, при этом по у откладываются 20lgH, а по ох – фаза .
Алгоритм построения ВЧХ по номограмме
Строятся ЛАЧХ и ФЧХ разомкнутой системы.
Заполняется следующая таблица (первые три строки):
1
…
п
Ндб
Н1
…
Н2
1
…
2
Р
Строится ЛАФХ в масштабе номограммы.
Данная ЛАФХ накладывается на номограмму.
Точки пересечения ЛАФХ с кривыми номограммы определяют значение ВЧХ. Заполняем четвертую строку данной таблицы. Т.о. получаем затабулированную функцию Р().
Интегральные показатели качества
Каждый из рассмотренных выше прямых и косвенных показателей качества характеризует лишь одно какое-либо свойство системы, лишь один признак ПП или частотной характеристики. Причём, все показатели качества связаны с настроечными параметрами регулятора сложными зависимостями, имеющими, как правило, противоречивый характер: изменение параметра приводит к улучшения одних показателей качества и к ухудшению других. Это значительно усложняет выбор параметров регулятора. Поэтому в инженерной практике широко используются интегральные показатели качества.
Интегральные
оценки представляют собой определенные
интегралы по времени (в пределах от 0 до
![]() ,
или до ожидаемого времени переходного
процесса) от некоторой функции управляемой
переменнойy(t)
(или сигнала ошибки
e(t)):
,
или до ожидаемого времени переходного
процесса) от некоторой функции управляемой
переменнойy(t)
(или сигнала ошибки
e(t)):
![]()
Подынтегральная функция f выбирается таким образом, чтобы интеграл лучше характеризовал качество системы и проще выражался через коэффициенты передаточной функции замкнутой системы. Чтобы интеграл был сходящимся, в функцию f вводят не абсолютные значения y(t) или e(t), а их отклонения от конечных, установившихся значений.