

13. Области целесообразного применения различных компоновок манипуляторов пр
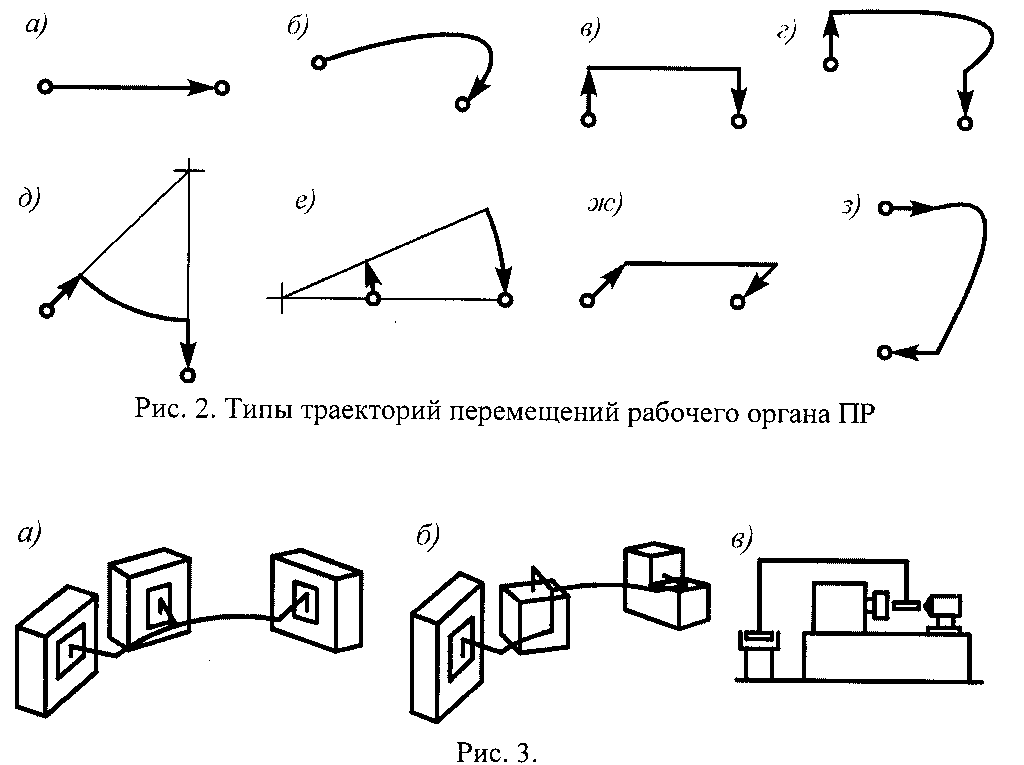
Перемещение рабочего органа между двумя или более точками, лежащих на общей прямой или окружности (рис 2.а.б) могут быть выполнены простейшими устройствами с одной поступательной или вращательной степенями подвижности. Манипуляторы с поступательной степенью подвижности, являются более простыми. При той же точности позиционирования у манипуляторов с вращающейся степенью подвижности требуется в 5 -15 раз более высокая точность привода.
+ компактность.
При отсутствии препятствий перемещение изделий между двумя и более точками осуществляется манипулятором с 2 степенями подвижности (траектория рис 2 в.д.).
Такие манипуляторы применяют при раскладке изделий на поддоны, загрузке штампов.
Траектории на (рис 2.е). также используют для раскладки изделий на поддоны и обслуживания прессов.
Траектории на (рис 2 ж.з.) применяют для загрузки металлорежущих станков и смены на них инструмента. Если на пути перемещения имеются препятствия, то транспортировка изделия между двумя или более точками, может осуществлять манипулятор с 2 поступательными степенями подвижности. Однако это возможно, если все требуемые точки лежат в одной плоскости (рис 3а), в остальных случаях (рис 3б) данная задача решается манипулятором с 3-мя переносными степенями подвижности. Для автоматизации сварки, окраски, обработки сложных поверхностей и загрузки сооружений разной высоты (рис 3в) требуются роботы с рабочей зоной, размеры которой в различных направлениях соизмеримы. Они в основном имеют 3 степени подвижности.
14. Агрегатно-модульное построение промышленных роботов. Общие положения
Приемы и принципы используемые отдельными конструкторами при создании агрегатно-модульных изделий различны. В состав ПР входят основное системы 3-х видов:
Система управления, исполнительная и несущая. При агрегатно-модульном построении ПР, функциональные узлы этих систем строятся на агрегатной основе и на их базе создаются различные компоновочные схемы. К отдельным агрегатам и модулям предъявляются специальные требования:
- законченность и конструктивная самостоятельность механизмов
- обеспечение прочности и жесткости в соответствие с проектными нормативами.
- обеспечение компоновки в различных сочетаниях и положениях.
- простота и надежность монтажа.
- унификация стыковочных элементов.
При создании агрегатно-модульной системы построения ПР решается задача минимизации необходимого числа степеней подвижности конструкции для выполнения ей своего функционального назначения.
Основные понятия системы унифицированной агрегатно-модульной базы робототехники.:
Компонент - унифицированное изделие относящиеся к продукции обще-машиностроительного применения. (двигателя, редукторы, пневмо- и гидро- аппаратура).
Унифицированный узел ПР - элемент ПР, имеющий унифицированные присоединительные размеры и параметры внешнего сопряжения, а также сборочная единица ПР с теми же характеристиками. (Порталы, каретки с приводами).
Агрегат ПР - совокупность элементов и (или) узлов ПР, образующие механизм, предназначенный для выполнения движения по 1-ой степени подвижности реализуемых с помощью присоединения к механизму привода и имеющий унифицированное место применение.
Исполнительный модуль ПР - устройство реализующее движение ПР по одной координате при подключении его к цепям энергопитания и управления, имеющее унифицированные присоединительные размеры. (модуль линейного перемещения, подъема, вращения, схваты и т.д.).
Блок ПР - часть конструкции ПР имеющая унифицированные присоединительные размеры, предназначенная для выполнения определенных функций, включая перемещение по не менее, чем по 1-ой степени подвижности и конструктивно объединяющая несколько модулей и узлов. (шарнирно-сочлененные руки, оснащенные приводами).