

1.2. Чисельне розв’язання трансцендентних рівнянь. Опис методів дихотомії (половинного ділення), хорд, дотичних, комбінованого методу хорд та дотичних
До трансцендентних функцій відносять всі неалгебраїчні функції:
Показникові
ах,
логарифмічні
![]() ,
,![]() ,
тригонометричні sin
x, cos
x, tgx, ctgx,
обернені тригонометричні
,
тригонометричні sin
x, cos
x, tgx, ctgx,
обернені тригонометричні
![]() та
інші.
та
інші.
Нелінійні рівняння, які містять трансцендентні функції називаються нелінійними трансцендентними рівняннями.
Розв’язком
нелінійного рівняння на ЕОМ називається
вектор
![]() ,
координати якого
,
координати якого
![]() при підстановці в початкове рівняння
перетворює його в тотожність.
при підстановці в початкове рівняння
перетворює його в тотожність.
В нелінійному рівнянні виду
![]()
і-та
координата вектора
![]() називається
і-
тим коренем рівняння, а а1,
а2,
…, ат
- коефіцієнтами рівняння.
Нехай маємо рівняння
називається
і-
тим коренем рівняння, а а1,
а2,
…, ат
- коефіцієнтами рівняння.
Нехай маємо рівняння
![]() ,
де
,
де
![]() –
неперервна, монотонна нелінійна функція,
яка має на відрізку
–
неперервна, монотонна нелінійна функція,
яка має на відрізку
![]() єдиний
корінь
єдиний
корінь
![]() ,
тобто добуток
,
тобто добуток
![]() ,
причому
,
причому
![]() ,
де
,
де
![]() –
задана похибка обчислень. Потрібно
знайти значення кореня
з
заданою похибкою
(рис.
1.2.1.).
–
задана похибка обчислень. Потрібно
знайти значення кореня
з
заданою похибкою
(рис.
1.2.1.).
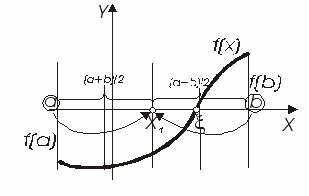
Рисунок 1.2.1. – Графічна інтерпретація методу половинного ділення.
Алгоритм методу (рис.1.2.1.) оснований на багатократному ділені навпіл і звужуванні досліджуваного відрізка , який отримали в результаті попереднього дослідження функції (відокремлення коренів).
Метод половинного ділення
Метод половинного ділення – це найпростіший метод уточнення кореня рівняння. Він сходиться для будь-яких неперервних функцій , в тому числі недиференційованих. Швидкість сходження невелика
![]() .
.
Алгоритм методу
1) На
відрізку
вибираємо
точку
![]() ,
яка розділяє його на два рівних відрізки
,
яка розділяє його на два рівних відрізки
![]() і
і
![]() ,
довжина яких рівна і знаходиться за
формулою
,
довжина яких рівна і знаходиться за
формулою
![]()
2) Перевіряємо
чи
![]() ,
якщо так, то
–
точний корінь початкового рівняння і
переходимо до пункту 6.
,
якщо так, то
–
точний корінь початкового рівняння і
переходимо до пункту 6.
3) У
випадку, коли
![]() ,
то з двох отриманих відрізків
і
,
то з двох отриманих відрізків
і
![]() вибираємо
той, на кінцях якого функція
приймає
значення протилежних знаків, тобто,
якщо
вибираємо
той, на кінцях якого функція
приймає
значення протилежних знаків, тобто,
якщо
![]() ,
тоді залишаємо відрізок
і
точку
,
тоді залишаємо відрізок
і
точку
![]() переносимо
в точку
переносимо
в точку
![]() (
(![]() );
якщо
);
якщо![]() ,
то залишаємо відрізок
і
переносимо точку
,
то залишаємо відрізок
і
переносимо точку
![]() в
точку
(
в
точку
(![]() )
і переходимо до пункту 1.
)
і переходимо до пункту 1.
4) Процес
ділення відрізка навпіл виконується
доти, поки на якомусь етапі, або середина
відрізка буде коренем, або буде виконана
умова закінчення ітераційного процесу:
![]() .
.
5) У
цьому випадку за наближене значення
кореня вибирають
![]() .
.
6) Вивід результатів. Кінець алгоритму.
7) Відомо,
що при цьому похибка не перевищує
![]() ,
де
,
де
![]() –
число ітерацій.
–
число ітерацій.
Схема алгоритму розв'язання нелінійного рівняння методом половинного ділення представлена на рисунку 1.2.2.
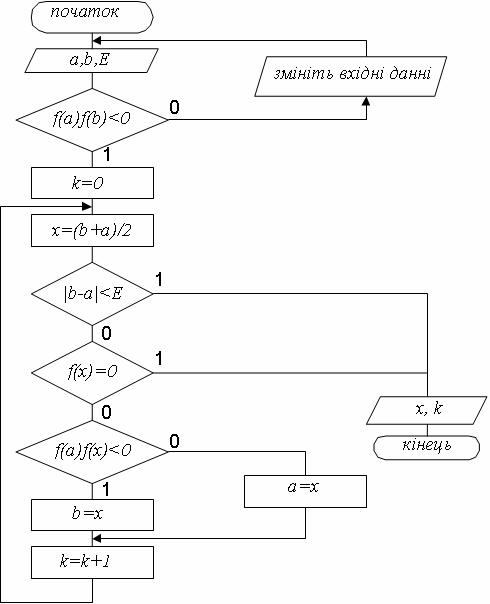
Рисунок 1.2.2. – Схема алгоритму розв'язання нелінійного рівняння методом половинного ділення
Метод хорд.
Метод хорд є одним з найбільш поширених методів розв’язання алгебраїчних і трансцендентних рівнянь. В літературі він також зустрічається під назвою "метод лінійного інтерполювання" і "метод пропорційних частин".
Постановка задачі
Розглянемо рівняння , де неперервна нелінійна функція, яка на відрізку монотонна, диференційована і має єдиний корінь (тобто ). Потрібно знайти наближене значення кореня з заданою похибкою .
Суть методу хорд полягає в тому, що на достатньо малому відрізку дуга функції замінюється хордою ab, яка її стягує. За наближене значення кореня приймається точка х1 перетину хорди з віссю
 (рис.1.2.3.а).
(рис.1.2.3.а).
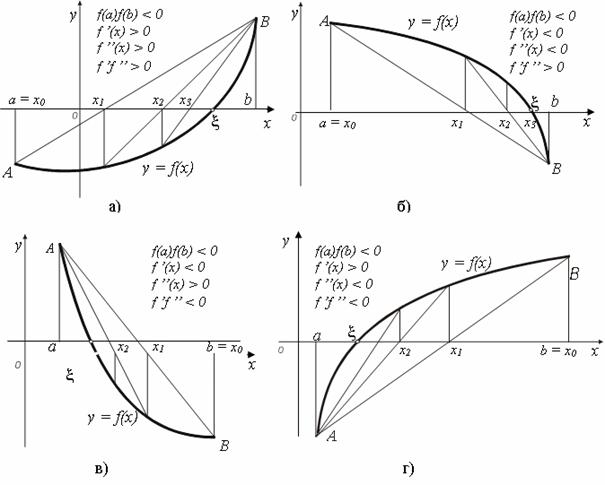
Рисунок 1.2.3. – Графічна інтерпретація методу хорд і процедури визначення рухомого кінця хорди
Рівняння хорди, яка проходить через точки має вигляд
![]()
Знайдемо
значення
![]() ,
для якого
,
для якого
![]() ,
тобто для нерухомого кінця:
,
тобто для нерухомого кінця:
![]()
Ця
формула називається формулою методу
хорд. Тепер корінь
![]() знаходиться
всередині відрізка
знаходиться
всередині відрізка
![]() .
Значення кореня
можна
уточнити за допомогою метода хорд на
відрізку
,
тоді нове наближене значення кореня х2
знаходиться за формулою
.
Значення кореня
можна
уточнити за допомогою метода хорд на
відрізку
,
тоді нове наближене значення кореня х2
знаходиться за формулою
![]() .
.
Аналогічна
для всякого
![]() -го
наближення до точного значення кореня
даного
рівняння використовується формула:
-го
наближення до точного значення кореня
даного
рівняння використовується формула:
![]()
Процес стягування хордою продовжується багаторазово доти, поки не одержано наближений корінь із заданим степенем точності
![]()
де
![]() –
наближені значення коренів рівняння
,
відповідно на
і
–
наближені значення коренів рівняння
,
відповідно на
і
![]() -му
ітераційному кроці;
–
задана точність обчислень.
-му
ітераційному кроці;
–
задана точність обчислень.
Слід відмітити, що розглянутий випадок (рис.1.2.3.а) перетину функції відрізку не є єдиним. Існує ще три варіанти перетину функції, кожний з яких відрізняється напрямком побудови хорд і відповідно рухомими кінцями відрізку. Наприклад, на рис.1.2.3.а,б рухомий кінець відрізку а, а на рис.1.2.3.в,г рухомий кінець – і відповідно формула для нього має вигляд:
![]()
Для автоматизації цього алгоритму необхідно розробити правило для автоматичного вибору рухомого кінця хорди і відповідно формули для обчислення наближеного значення кореня. Існує два правила визначення рухомого кінця хорди.
Комбінований метод.
Методи хорд і дотичних дають наближення кореня з різних сторін відрізку . Тому їх часто використовують в поєднанні один з одним, і процес уточнення кореня нелінійного рівняння проходить скоріше.
Постановка задачі
Нехай дано рівняння , де неперервна нелінійна функція, яка на відрізку монотонна, диференційована і має єдиний корінь (тобто ). Потрібно знайти наближене значення кореня з заданою похибкою .
Використаємо комбінований метод хорд і дотичних з урахуванням поведінки функції на відрізку . Якщо f'(x)Чf''(x)>0, то метод хорд дає наближення кореня з недостачею, а метод дотичних – з залишком (рис.1.2.4.а,б). Якщо ж f'(x)Чf''(x)<0, то методом хорд отримуємо значення:
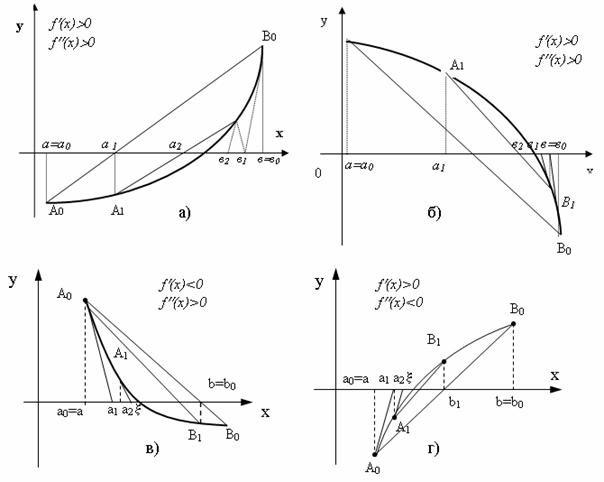
Рисунок 1.2.4. – Геометричний зміст комбінованого методу .
методом
дотичних – з недостачею (рис.1.2.4.в,г).
Однак в усіх випадках справжній корінь
знаходиться
між наближеними коренями, які отримані
за методом хорд і методом дотичних,
тобто виконується нерівність а<
хn
< x
< хn<b,
де хn
– наближене
значення кореня з недоліком,
![]() `-
з надлишком.
`-
з надлишком.
Суть методу полягає в тому, що на досить малому відрізку (отриманому при відокремлені коренів) дуга функції з одного кінця відрізка стягується хордою, а з другого – дотичною. Тобто, якщо сумістити обидва методи, то після знаходження коренів відрізок на кожному кроці ітерації звужується шляхом переносу кінців відрізка в точки перетину хорди та дотичної з віссю .
Наближене значення кореня нелінійного рівняння визначається відповідно до таких правил:
Правило
1. Якщо добуток
першої на другу похідну функції
більший
за нуль:
![]() ,
(рис. 1.2.4.а,
б) то рухомим для методу хорд є кінець
a,
і наближене значення кореня з боку кінця
a
обчислюється за формулою хорд:
,
(рис. 1.2.4.а,
б) то рухомим для методу хорд є кінець
a,
і наближене значення кореня з боку кінця
a
обчислюється за формулою хорд:
![]() .
.
Для
методу дотичних рухомим є кінець
![]() ,
і наближене значення кореня обчислюється
за формулою дотичних:
,
і наближене значення кореня обчислюється
за формулою дотичних:
![]() .
.
Правило
2. Якщо добуток
першої на другу похідну функції
менший
за нуль:
![]() (рис.
1.2.4.
в, г), то рухомим для методу хорд є кінець
b,
і наближене значення кореня з боку кінця
b
обчислюється за формулою хорд:
(рис.
1.2.4.
в, г), то рухомим для методу хорд є кінець
b,
і наближене значення кореня з боку кінця
b
обчислюється за формулою хорд:
![]() .
.
Для методу дотичних рухомим є кінець a, і наближене значення кореня обчислюється за формулою дотичних:
![]() .
.
Комбінований
метод дуже зручний при оцінці похибки
обчислень. Ітераційний процес продовжується
доти, поки не стане виконуватися
нерівність
![]() .
За наближене значення кореня приймають
.
За наближене значення кореня приймають
![]() ,
де
,
де
![]() і
і
![]() –
наближені значення кореня відповідно
з недостачею та з надлишком.
–
наближені значення кореня відповідно
з недостачею та з надлишком.