

20.6. Оптимальная фильтрация известного сигнала при небелом шуме
Если шум, действующий совместно и аддитивно с сигналом, имеет неравномерный спектр, т. е. не является белым, задачу синтеза оптимального фильтра, согласованного с сигналом, сводят к предыдущей задаче фильтрации на фоне белого шума. А именно, применяют метод "отбеливающего" фильтра, суть которого состоит в следующем. Пусть Kopt() – передаточная функция искомого фильтра, максимизирующего выходное отношение сигнал/шум в моментT0при действии на входе сигналаs(t) со спектромS(i) и шума с известной спектральной плотностьюN().
Синтезируемый фильтр можно дополнить
двумя обратными друг другу воображаемыми
звеньями с комплексными коэффициентами
передачи K(i)
и![]() ,
действие которых взаимно компенсируют
друг друга. Организовать цепочку звеньев
с названными частотными характеристиками
можно так рис. 20.9, чтобы после прохождения
первого дополнительного фильтра шум
становился белым.
,
действие которых взаимно компенсируют
друг друга. Организовать цепочку звеньев
с названными частотными характеристиками
можно так рис. 20.9, чтобы после прохождения
первого дополнительного фильтра шум
становился белым.

Рис. 20.9. Применение отбеливающего фильтра
Модуль коэффициента передачи такого отбеливающего фильтра должен, очевидно, удовлетворять условию
![]() .
.
После первого звена на рис. 20.9 формируется шум с равномерным энергетическим спектром
![]() .
.
В той же точке сигнал будет иметь спектр
![]() ,
,
с которым можно согласовать последующий линейный фильтр в соответствии с :
 .
.
Таким образом комплексный коэффициент передачи фильтраЮ согласованного с небелым шумом, оказывается равным
 .
.
Видно, что найденная характеристика оптимального фильтра согласована не только с сигналом, но и с энергетическим спектром шума, так как она одновременно зависит от S(i) и обратно пропорциональнаN().
Смысл результата сводится к подчеркиванию в составе выходного колебания тех частотных составляющих сигнала, которые имеют большее превышение над шумом при данной частоте. Разумеется, и такой фильтр должен удовлетворять выявленным выше условиям физической осуществимости. Но теперь к ним следует добавить еще одно, а именно
![]() .
.
20.7. Определение параметров сигнала, наблюдаемого на фоне помех
Передача или извлечение информации радиотехническими системами всегда требует выделения сообщений, заложенных в некоторые параметры принимаемого радиосигнала. Эти информативные параметры сигналов измеряются на приемной стороне радиоэлектронной системы. Помехи, на фоне которых наблюдаются принимаемые сигналы, искажает результаты измерения информативных параметров. В зависимости от того, как сообщение закладывается в сигнал, т. е. от того, какой применяется метод модуляции несущего колебания, оно может по-разному искажаться помехами. Поэтому возникают по крайней мере две оптимизационные задачи. Во-первых, нужно выбирать те способы модуляции, которые в заданной помеховой обстановке обеспечивают наибольшую точность воспроизведения передаваемых сообщений. Во-вторых, нужно синтезировать наилучшие алгоритмы обработки сигналов, принимаемых на фоне помех, с тем, чтобы достичь максимальной точности воспроизведения сообщений. К формулированию и решению указанных задач можно подойти, используя следующие представления и рассуждения.
Пусть принимается сигнал s(t,и), гдеи– параметр сигнала, несущий сообщение. Сигнал наблюдается в присутствии помехи – шумаn(t) со спектральной плотностьюNш
![]() .
.
Задача радиоприема состоит в наилучшем измерении (оценке) этого параметра.
Естественный путь решения этой задачи
состоит в том, чтобы создать приемное
устройство, на выходе которого формируется
величина
![]() ,
однозначно связанная си.
Эту величину следует измерить, т. е.
сравнить с эталонными образцами
,
однозначно связанная си.
Эту величину следует измерить, т. е.
сравнить с эталонными образцами![]() ,
образующими шкалу измерений, и выбрать
тот единственный образец
,
образующими шкалу измерений, и выбрать
тот единственный образец![]() ,
который ближе всех других подходит к
,
который ближе всех других подходит к![]() .
Этот образец принимается за оценку
информативного параметра*.
.
Этот образец принимается за оценку
информативного параметра*.
Но можно поступить иначе, а именно, не
выделяя
![]() ,
сформировать измерительную шкалу из
образцов сигнала
,
сформировать измерительную шкалу из
образцов сигнала![]() и сравнивать принимаемый сигналs(t,и)
с этими образцовыми сигналами. В
результате сравнения следует выбрать
тот образцовый сигнал
и сравнивать принимаемый сигналs(t,и)
с этими образцовыми сигналами. В
результате сравнения следует выбрать
тот образцовый сигнал![]() ,
который окажется ближе других к принятому.
Значение параметраiэтого сигнала и следует принять за
оценку информативного параметра сигнала*.
,
который окажется ближе других к принятому.
Значение параметраiэтого сигнала и следует принять за
оценку информативного параметра сигнала*.
Действие помехи изменяет форму принимаемого колебания по сравнению с формой исходного сигнала. Поэтому может и не случиться совпадения принимаемого колебания ни с одним из образцов. В этом случае при выборе образца сигнала, с которым отождествляется принятый сигнал, нужно руководствоваться некоторым критерием из сходства (точнее – близости). Чаще всего пользуются среднеквадратическим критерием
![]()
и выбирают тот из образцов, для которого мера различия iокажется минимальным.
Ясно, что при таком способе выбора вероятность перепутывания значений сообщения тем меньше, чем сильнее образцы отличаются друг от друга и чем меньше мощность принимаемого сигнала по сравнению с мощностью помехи.
Нормированная к энергии сигнала
![]() величина
величина
![]() ,
,
рассматриваемая как функция i, используется как функция различия сигнала иi-го образца.
Всякий реальный сигнал ограничен во времени s(t)0 приt[-T/2,T/2]. Поэтому интегрирование в и можно проводить по области определения сигнала.
Меру различия, определенную согласно
, можно рассматривать как функцию
разности
![]() Функция
Функция![]() неотрицательна, обращается в нуль при=0 (т. е. приi=и)
и не убывает с ростом абсолютного
значения аргумента,
хотя и не обязательно сохраняя
монотонность.
неотрицательна, обращается в нуль при=0 (т. е. приi=и)
и не убывает с ростом абсолютного
значения аргумента,
хотя и не обязательно сохраняя
монотонность.
По виду функции различия () можно судить об устойчивости исследуемого сигнала к помеховым искажениям параметра. Быстрое возрастание() от нуля с увеличениемсвидетельствует о том, что даже малое изменение параметра в образце сигнала приводит к резкому увеличению меры различия. Следовательно, это различие легко обнаружить и труднее замаскировать помехой. Значит, сигналы с быстро нарастающей функцией различия в() могут, при модуляции параметрасообщением обеспечить передачу информации с меньшими искажениями, но разведка может точно измерять этот параметр на фоне помех.
Соотношение может быть преобразовано к виду
![]() ,
,
где QиQi- энергии сигналов при значениях параметраииiа:
![]() .
.
Зависимость q() в литературе называется сигнальной функцией [3].
Все информативные для приемника параметры сигналов и, соответственно, все виды влияния изменений параметров сигнала на характер сигнальной функции можно разбить на две группы. К первой (неэнергетической) относятся те параметры, при вариациях которых не происходит изменения энергии сигнала. К этой группе относятся такие параметры и характеристики, как частота, задержка, длительность импульса и т.п. Ко второй, группе {энергетической) относятся сигналы, у которых энергия сигнала меняется при изменении информативного параметра. Сюда относятся сигналы с AM.
Для всех неэнергетических методов модуляции зависимость преобразуется к виду
![]()
и качество определения значения информативного параметра полностью определяется видом сигнальной функции q(). Как следует из , сигнальная функция должна убывать с ростом аргументаи чем круче будет спадатьq() с увеличением ||, тем точнее может измеряться параметр. Максимальное значениеq(0)=1. Из определения видно, что по своей структуре сигнальная функция аналогична автокорреляционной функции сигнала, а когда информативным параметром является временная задержка или длительность импульса, совпадает с ней.
Естественно, что если не заданы конкретный вид и уровень помех, нельзя дать и количественную оценку искажений сообщения, в том числе и меры уровня аномальных ошибок. Однако, сравнивая сигнальные функции двух различных радиосигналов (при неэнергетических методах модуляции), можно сказать, какой из них может обеспечить большую точность работы средств разведки при весьма общих предположениях о характере помех. При этом, основываясь на анализе только сигнальных функций можно оценить предельно возможную, потенциальную точность измерений, исключив из рассмотрения способ демодуляции несущей.
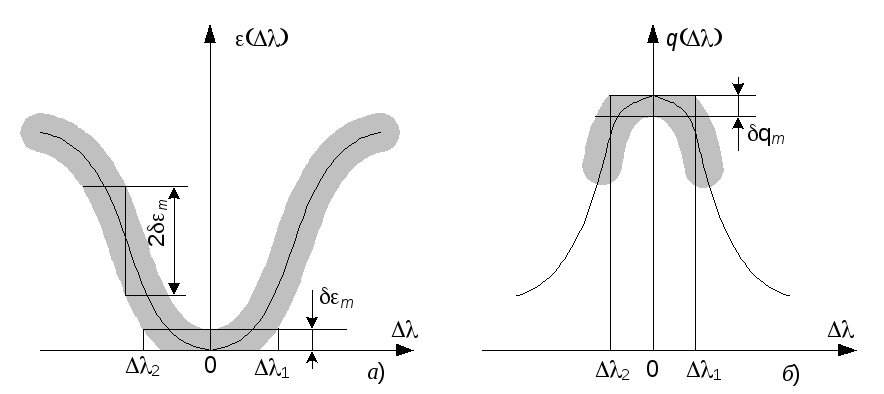
Рис.20.10. К определению ошибки измерения параметра
При отсутствии помех (искажений) iсовпадает с мерой различия . Если же искажения есть, тоiбудет отличаться отна некоторую величину ошибку, которая и приводит к тому, что выбирается другой образец сигнала, а следовательно, параметропределяется с ошибкой. Предположим, что образцов сигнала может быть сколь угодно много и дискретность измерения (|i+1i|) весьма мала. Тогда функция() определяет точность измерения параметра, если задана точность измерения меры различия. Это утверждение иллюстрируется рис. 20.10,а, где вдоль кривой() показан коридор возможных ошибок шириной ±m. Определяяпо минимальному значению', средство разведки ошибется на величину, которая лежит в пределах от1до2. Очевидно, чем круче нарастают обе ветви функции(), тем меньше будут интервалы значений ошибок |1–2|.
Сигнальная функция q() при неэнергетическом параметре связана с мерой различия простым соотношением , т.е. вместо измеренияможно говорить об измеренииqс ошибкойq, и определять точность оценки параметрапо графику сигнальной функции, как показано на рис. 20.10,б).
Сравнивая сигнальные функции для двух случаев (3 и 2) на рис. 20.10 a) иб), можно утверждать, что сигнал, которому соответствует сигнальная функция 2, обеспечивает при одинаковых ошибках измеренияmболее высокую точность определения информативного параметра, чем сигнал, которому соответствует функция 1.
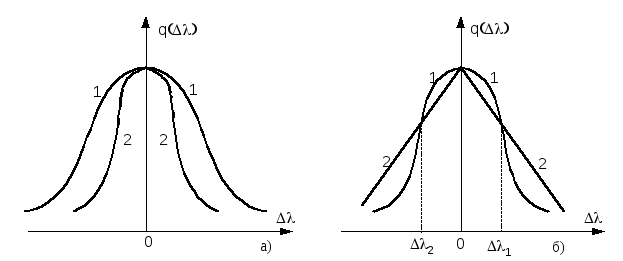
Рис.20.11. К сравнению двух сигнальных функций
Несколько сложнее обстоит дело при сравнении точностей определения параметра для сигнальных функций вида 1 и 2 на рис. 20.11, б. При высокой точности измерения, когда ошибки измерения параметра значительно меньше величин 1и2, сигнал с сигнальной функцией 2 позволяет производить измерения точнее, чем сигнал с функцией 1. При более грубых измерениях это уже не обязательно, и, если ошибки измерений, большие по модулю значений1и2, встречаются достаточно редко, сигнал с функцией 2 может оказаться предпочтительнее.
Для многих методов модуляции сигнальная функция имеет вид, показанный на рис.20.12 сплошной линией. Здесь на медленно меняющуюся зависимость q() накладываются малые колебания малого периода (высокой частоты) сравнительно с временем нарастания и спада огибающей. Исследуя такие сигналы, надо в первую очередь оценить точность измерения, которую может реализовать средство разведки. Если эта точность настолько высока, что ошибки составляют доли периода быстрых колебаний сигнальной функции, то рассматривать надо только начальный участок в пределах1-2. (рис. 20.12). В большинстве случаев предполагаемые ошибки значительно превышают указанные пределы. При этом вполне допустимо пренебречь малыми колебаниями и рассматривать сглаженную кривую, показанную на рис. 20.12 штриховой линией.
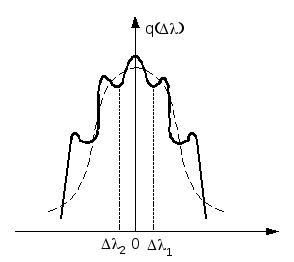
Рис. 20.12. Сигнальная функция с малыми колебаниями
Другой характерный случай соответствует большим колебаниям сигнальной функции, как на рис. 20.13. При точных измерениях здесь, как и в предыдущем случае, можно рассматривать только начальный участок кривой q(). Если же возможные ошибки превышают период колебаний осциллирующего множителя сигнальной функции, что соответствует ошибкам в определении сигнальной функции, большимq1то на осивыделяется ряд областей, в пределах которых может лежать ошибка параметра.
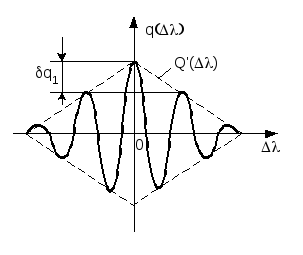
Рис. 20.13. Сигнальная функция с большими колебаниями
Первая такая область находится в окрестности =0, вторая и третья – около соседних боковых максимумов функцииq() и т. д. Иначе говоря, параметропределяется неоднозначно. Когда приемник располагает априорными сведениями, ограничивающими область возможных значений, их можно использовать для исключения неоднозначности. Тогда точность измерения определяется шириной первой области ошибок. Сравнение сигнальных функций разных сигналов при этом следует производить по двум показателям: по точности измерения и по требованиям к априорным сведениям, необходимым для исключения неоднозначности. Полезный характеристикой при этом является информативность, которая определяется логарифмом отношения допустимой априорной ошибки к получающейся после измерения апостериорной ошибке. Информативность будет тем выше, чем дальше отстоят боковые (побочные) максимумы сигнальной функции от основного.
Возможно, однако, что априорных сведений нет или их точность недостаточна для исключения неоднозначности. При этом точность практически определяется крайними областями ошибок и, следовательно, при анализе полную кривую q() можно заменить ее огибающейQ(), показанной на рис. 20.13 пунктирной линией.
Возможен и другой подход к анализу такой сигнальной функции. Допустим, что вызванные помехами ошибки измерения по большей части малы, но существует и некоторая вероятность появления больших ошибок. Тогда можно считать, что точность оценки параметраопределяется начальным участком сигнальной функции, но могут иметь место и аномальные большие ошибки, которые обычно называются аномальными. Вероятность отсутствия аномальных ошибок характеризует надежность измерения. При таком подходе аппарат, основанный на анализе сигнальных функций, позволяет сравнивать помехоустойчивость сигналов по двум показателям: точности и надежности. Чем выше уровень боковых максимумов в сигнальной функции, тем выше надежность скрытия параметра от несанкционированного определения средствами технических разведок.
В некоторых случаях информативный параметр может принимать только ряд дискретных фиксированных значений. Тогда задача измерения сводится к определению номера значениядля принятого (обнаруженного) радиосигнала. Такой случай характерен, например, для приема сигналов цифровых систем передачи информации. Сигнальная функция для такого случая также будет дискретной. Ошибка при измерении сигнальной функции может привести к тому, что вместо истинного значения параметраiбудет принято другое фиксированное значениеj. Качество измерения при этом удобно характеризовать вероятностью ошибки, а сигнал будет тем лучше, чем больше отличаются от единицы значения сигнальной функции.
Возможны случаи, когда приемнику приходится выделять более сложное сообщение, заложенное срезу в несколько параметров сигнала. Так, в радиолокации сигнал несет информацию и о дальности, и о скорости цели. Соответственно, информативными будет и задержка принятого сигнала относительно переданного и доплеровский сдвиг частот этих сигналов. При этом и сигнальная функция будет зависеть от многих (в частности для рассмотренного случая – двух) переменных.
Если полагать, что приемник работает в нормальной сигнальной обстановке, в отсутствии специально организованных помех, то причиной ошибок является действие только аддитивного шума приемных устройств. Тогда, учитывая, что оценка параметра определяется наименьшим значением измеренной функции различия, можно сформулировать достаточное условие наличия аномальных ошибок виде
![]()
С учетом соотношения условие представляется в виде
![]()
откуда искомое достаточное условие наличия аномальных ошибок
![]()
т.е. это условие должно выполняться для
всех, лежащих в
области
![]() .
.
При неэнергетическом параметре функция ограничена![]() и связана с сигнальной функцией q()
соотношением
и связана с сигнальной функцией q()
соотношением![]() .
Поскольку ошибкап()
может иметь разный знак, можно заменить
более сильным неравенством
.
Поскольку ошибкап()
может иметь разный знак, можно заменить
более сильным неравенством
![]() ,
,
или, иначе, используя связь () с сигнальной функциейq()
 .
.
В частном случае, когда в области аномальных ошибок сигнальная функция не имеет значительных выбросов, можно принять q()0. Тогда из получается условие, накладываемое на максимальное значение обобщенной помеховой функции, определенной согласно
![]()
где S(t,) – детерминированная функция, равная в данном случае 2[s(t,и)-s(t,)]. Поэтому условие наличия аномальных ошибок выглядит как
![]()
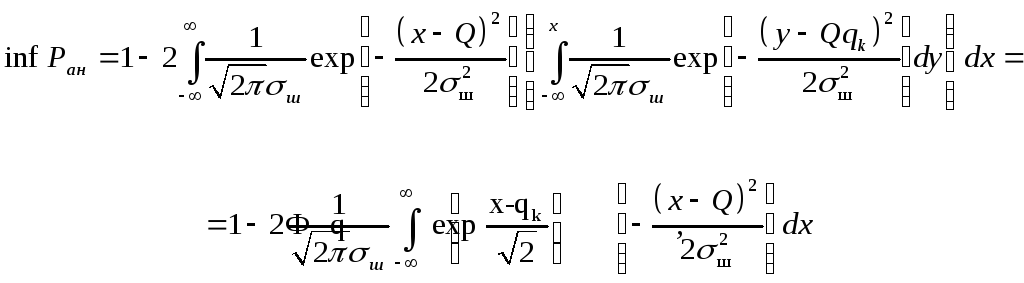
Таким образом, аномальные ошибки измерения параметра (параметров) сигнала происходят тогда, когда боковые выбросы оценки сигнальной функции по измеряемому параметру превосходят по величине уровень главного выброса. В случае приема сигнала с неэнергетическим параметром на фоне нормального стационарного белого шума вероятность такой ситуации можно оценить на основании следующего соотношения

где
![]() – мощность шума, прикладываемого к
каждому оцениваемому значению сигнальной
функции;n– число
независимых каналов, равное числу
градаций дискретных значений
информационного параметраи, соответственно, объему выборки
отсчетов, по которому однозначно и точно
восстанавливается сигнальная функция;qk– относительный уровеньk-го
значения сигнальной функции (относительно
уровня главного выбросаq1=1)
– математическое ожидание значения
сигнальной функции, которое получается
в процессе оценивания информативного
параметра на фоне шума.
– мощность шума, прикладываемого к
каждому оцениваемому значению сигнальной
функции;n– число
независимых каналов, равное числу
градаций дискретных значений
информационного параметраи, соответственно, объему выборки
отсчетов, по которому однозначно и точно
восстанавливается сигнальная функция;qk– относительный уровеньk-го
значения сигнальной функции (относительно
уровня главного выбросаq1=1)
– математическое ожидание значения
сигнальной функции, которое получается
в процессе оценивания информативного
параметра на фоне шума.
По структуре выражения видно, что оно задает вероятность такого события, которое образует полную группу с событием отсутствия превышения любым из n-1 боковых выбросов сигнальной функции случайного значения, сформированного в настроенном канале, гдеq=1.
Выражение получено в предположении о том, что все значения оценки сигнальной функции qk,k1:n, статистически независимы. Если нет достаточных оснований для того, чтобы принять это условие, полученная на основании оценка и оказывается завышенной и ее можно принять в качестве верхней границы вероятности аномальной ошибки. Для оценки нижней границы можно поступить следующим образом.
Дело в том, что далеко не все сомножители, входящие в произведение интегралов в одинаково значимы. Вклад разных сомножителей тем значительнее, чем больше математическое ожидание qkсоответствующего значения оценки сигнальной функции. А наибольший вклад в оценку вероятности аномальной ошибки вносит самый большой по величине выброс сигнальной функции: именно для него характерна наибольшая вероятность аномальной ошибки. Поэтому нижняя граница вероятности аномальной ошибки может быть оценена на основе двумерной совместной плотности распределения оценки сигнальной функции в окрестности главного и наибольшего из боковых выбросов (в окрестности главного и наибольшего из локальных максимумов). Соотношение для такой оценки, сконструированное на основе тех же рассуждений, которые ранее привели к , можно представить в виде
где qk– уровень наибольшего из боковых выбросов сигнальной функции, а коэффициент 2 перед интегралом учитывает тот факт, что боковые выбросы сигнальной функции всегда имеют пару (q() – четная функция).