

20.8. Сигнальные функции при измерении задержки и частоты радиосигнала
Определение времени задержки и частоты радиосигнала – распространенная и типичная задача для средств радиолокации и радиотехнической разведки. Несущая частота – один из самых информативных для средств разведки параметров сигнала.
Ниже рассмотрение проводится на основе анализа одномерных сигнальных функций некоторых характерных радиосигналов. Обобщение на случай произвольной размерности тривиально.
Во первых, представляет интерес рассмотрение ошибок определения задержки и частоты сигнала, имеющего формупачки радиоимпульсов. Не нарушая общности при существенном упрощении модели сигнала импульсы в пачке предполагаются прямоугольными (точнее – имеющими прямоугольную огибающую) и когерентными. Аналитическая модель такого сигнала может быть представлена в виде
![]()
где П(t,им) – последовательность прямоугольных импульсов единичной амплитуды с длительностью импульсаими периодом повторенияТп, так что полная длительность сигналаТс=NTп(N– число импульсов в пачке, наблюдаемой и анализируемой средством разведки). Сигнал будет задержан на время, которое в данном случае представляет собой информативный параметр. Принятый сигнал сравнивается с образцом, в который также введена задержка на времяi. Сигнальная функция, определяющая потенциальную точность измерения задержки и возможность происхождения аномальных ошибок, представляется в виде

где Q0=![]() ;i.
;i.
Отбрасывая в слагаемое, осциллирующее с частотой 2, можно получить
![]()

Интеграл, входящий в разбивается на сумму интегралов, причем каждое слагаемое соответствует интегрированию в пределах одного периода Тп. Пока сдвигменьше периода, таких интегралов будетN. При сдвиге в пределах отТпдо 2Тпинтегралов будетN–1 и т. д.
Естественно также, что каждый интеграл отличен от нуля только на тех подинтервалах времени, где импульсы двух перемножаемых последовательностей перекрываются. С учетом сказанного выражение для сигнальной функции можно представить в виде

График функции приведен на рис.20.17.
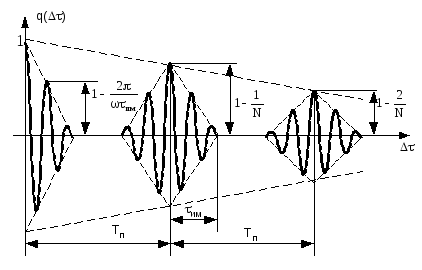
Рис.20.17. Сигнальная по задержке (совпадающая с автокорреляционной) функция пачки прямоугольных импульсов
Из анализа сигнальной (автокорреляционной)
функции следует ряд важных выводов о
качестве рассматриваемого сигнала при
его использовании для измерения задержки.
Допустим, что средство разведки можем
измерять qс такой
точностью, что ошибкаqзначительно меньше величины![]() .
Тогда исследуемый радиосигнал обеспечит
однозначное измерение задержки с
ошибками, составляющими доли периода
заполняющей импульс частоты.
Чем выше эта частота, тем точнее будет
оценка задержки, но и тем выше требования
к точности измеренияq, при которых
этот вывод справедлив. Практически
такой режим работы может быть использован,
еслиимне
очень велико.
.
Тогда исследуемый радиосигнал обеспечит
однозначное измерение задержки с
ошибками, составляющими доли периода
заполняющей импульс частоты.
Чем выше эта частота, тем точнее будет
оценка задержки, но и тем выше требования
к точности измеренияq, при которых
этот вывод справедлив. Практически
такой режим работы может быть использован,
еслиимне
очень велико.
Однако в большинстве случаев им>>1,
и точность следует оценивать по огибающей
сигнальной функции. При этом видно, что
точность будет тем выше, чем короче
импульс. Разумеется, что сравнение
следует производить при постоянной
полной энергии сигналаQ0,
поэтому для укороченных импульсов
сравнение корректно при соответствующем
увеличении импульсной мощности
![]() или числе импульсов в пачкеN.
или числе импульсов в пачкеN.
Измерение по огибающей импульса также
будет неоднозначным (будет приводить
к аномальным ошибкам), если ошибка в
оценке сигнальной функции превышает
![]() .
Такой случай обычно имеет место приN>>1. Наконец, как
видно из рис. 20.17, измерение задержки
может производиться по огибающей пачки
импульсов. Результаты такого измерения
всегда будет однозначными, без аномальных
ошибок, но очень неточными.
.
Такой случай обычно имеет место приN>>1. Наконец, как
видно из рис. 20.17, измерение задержки
может производиться по огибающей пачки
импульсов. Результаты такого измерения
всегда будет однозначными, без аномальных
ошибок, но очень неточными.
Отождествление измеряемой задержки с
аргументом ближайшего бокового выброса
сигнальной функции, имеющего уровень
![]() не всегда можно считать аномальной
ошибкой: это ошибка на период частоты
несущего колебания. Но при очень низких
частотах и такая ошибка может иметь
значительную величину. Совершенно
строго и безусловно аномальной будет
ошибка, превосходящая по величине
значениеТп(и кратная этому
значению). Такие ошибки соответствуют
аргументам максимумов огибающей
сигнальной (автокорреляционной) функции
пачки. Происходят ошибки с такой
вероятностью, с которой относительное
значение помехового выброса превзойдет
уровень
не всегда можно считать аномальной
ошибкой: это ошибка на период частоты
несущего колебания. Но при очень низких
частотах и такая ошибка может иметь
значительную величину. Совершенно
строго и безусловно аномальной будет
ошибка, превосходящая по величине
значениеТп(и кратная этому
значению). Такие ошибки соответствуют
аргументам максимумов огибающей
сигнальной (автокорреляционной) функции
пачки. Происходят ошибки с такой
вероятностью, с которой относительное
значение помехового выброса превзойдет
уровень![]() .
.
Важно установить, какими свойствами
обладает пачка когерентных радиоимпульсов,
если по ней измеряется частота (точнее,
смещение частоты относительно некоторого
опорного значения, например – относительно
середины диапазона априорной для
разведки неопределенности значения
несущей сигнала). Прежде всего, необходимо
отметить, что вид сигнальной функции
q() оказывается
зависимым от выбора начала отсчета
времени. Для сигнала, заданного, например,
на интервале от 0 доТс,
сигнальная функция будет не такой, как
для сигнала в интервалеt![]() .
Это обстоятельство можно пояснить
следующим образом. Когда считается
неизвестен только один параметр сигнале
- частота, то и опорные образцы сигнала
могут различаться только по этому
параметру. Это означает, что в какой-то
один момент времениt0все образцы (и принимаемый сигнал) должны
точно совпадать. По мере удаления от
моментаt0расхождение будет увеличиваться и тем
сильнее, чем больше разница соответствующих
частот. Интегральное различие между
сигналом и образцом, которое и определяет
сигнальную функцию, будет зависеть от
моментаt0относительно начала наблюдения сигнала.
Ясно, что еслиt0совпадает с неталом сигнала, то общее
расхождение за времяТ0будет
бóльшим, чем когдаt0взят в середине, Представляя, для примера,
сигнал в виде
.
Это обстоятельство можно пояснить
следующим образом. Когда считается
неизвестен только один параметр сигнале
- частота, то и опорные образцы сигнала
могут различаться только по этому
параметру. Это означает, что в какой-то
один момент времениt0все образцы (и принимаемый сигнал) должны
точно совпадать. По мере удаления от
моментаt0расхождение будет увеличиваться и тем
сильнее, чем больше разница соответствующих
частот. Интегральное различие между
сигналом и образцом, которое и определяет
сигнальную функцию, будет зависеть от
моментаt0относительно начала наблюдения сигнала.
Ясно, что еслиt0совпадает с неталом сигнала, то общее
расхождение за времяТ0будет
бóльшим, чем когдаt0взят в середине, Представляя, для примера,
сигнал в виде
е(t)=Umsintприt1tt2,
считается, что t0=0, ибо именно приt=0 сигнале(t) не зависит оти, следовательно, в этот момент все образцы точно совпадают. Но тогда, естественно, чтоq() будет зависеть не только от (t1-t2), но и от абсолютного значенияt1.
В некоторых случаях, когда определены физические условия задачи, можно однозначно задать начало сигнала t1. Так, например, если речь идет об определении частоты колебаний на выходе УПЧ, начало сигнала надо совместить с началом отсчета времени и считать, что сигнал расположен в интервале [0;Tc]. В других случаях определенно задать начало сигнала нельзя. Это связано с идеализированной постановкой задачи об измерении частоты при точно известной фазе. На практике чаще всего бывает так, что если неизвестна частота, то неизвестна и фаза, и измерять надо два параметра, рассматривая двумерную сигнальную функцию. Тем не менее идеализированная постановка задачи также представляет интерес, например, когда речь идет о сравнении сигналов в одинаковых условиях. Кроме того, произвольный выбор начала отсчета в пределах длительности сигнала не очень сильно влияет на вид сигнальной функции.
Полагая, что приемник средства РРТР производит оптимальную обработку при измерении частоты принимаемого сигнала и что фазы сигнала и его образцов, используемых при такой обработке, совпадают в момент начала сигнала, сигнальную функцию для пачки радиоимпульсов с когерентным заполнением следует записать в виде

где =i;ii- смещение частоты в принятом сигнале и в образце соответственно.
Имея в виду, что П(t,им)П(t,им)=П(t,им), можно разбить интеграл в на сумму интегралов, каждый из которых вычисляется в пределах, соответствующих одному импульсу из последовательности П(t,им). Пренебрегая малыми членами (с аргументамиим) можно получить

Вычислив в сумму, окончательно можно получить

где NTп- длительность пачки импульсов.
Зависимость сигнальной функции пачки импульсов по частоте для N=1 превращается в
 ,
,
которая уже рассматривалась выше, в связи с анализом аномальных ошибок определения частоты одиночного прямоугольного импульса. Эта зависимость изображена на рис. 20.18.
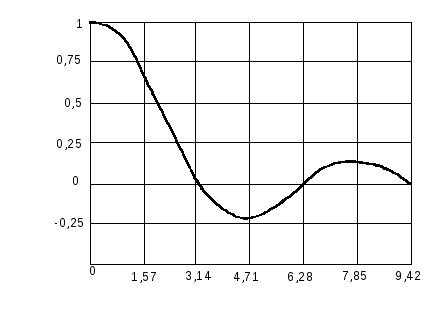
Рис. 20.18. Сигнальная функция для оценки точности определения частоты радиоимпульса
Вероятность аномальной ошибки в первом
приближении совпадает с вероятностью
совместного действия двух таких помеховых
выбросов, которые опустят основной
лепесток сигнальной функции и поднимет
боковой лепесток до уровня, превышающего
главный. Такая функция спадает от единицы
при =0
и до нуля при=![]() .
Поэтому, чем длиннее импульс, тем быстрее
спадает сигнальная функция и, следовательно,
тем точнее определяется смещение
частоты. Но вероятность аномальной
ошибки от длительности импульса не
зависит, если, разумеется, сравнивать
при разной длительности импульсы с
одинаковой энергией.
.
Поэтому, чем длиннее импульс, тем быстрее
спадает сигнальная функция и, следовательно,
тем точнее определяется смещение
частоты. Но вероятность аномальной
ошибки от длительности импульса не
зависит, если, разумеется, сравнивать
при разной длительности импульсы с
одинаковой энергией.
Для N=2, т.е для пачки из двух импульсов, разнесенных на времяТп, как на Рис. 20.19,

Рис. 20.19. Пачка импульсов при N=2
сигнальная функция принимает вид
 .
.
Вид сигнальной функции q2()
пары импульсов рис. 20.19 изображен на
рис. 20.20. Полная длительность сигнала
может считаться равнойТ=Тп+им.
Если сопоставить функцииq1()
иq2()
при равной полной длительности сигнала
и равной энергии, модно получить
сравнительные характеристики этих
сигналов в режиме измерения смещения
частоты. Первый представляет собой
прямоугольный импульс длинойТи
амплитудойU(энергия
Q=![]() .
Второй сигнал рис. 20.20 состоит из двух
более коротких импульсов Каждый импульс
занимает время в одну десятую полной
длительности сигнала, но с большей
амплитудой. Таким образом, во втором
сигнале заданная энергия как бы
сосредоточена по краям временного
интервалаТ.
.
Второй сигнал рис. 20.20 состоит из двух
более коротких импульсов Каждый импульс
занимает время в одну десятую полной
длительности сигнала, но с большей
амплитудой. Таким образом, во втором
сигнале заданная энергия как бы
сосредоточена по краям временного
интервалаТ.
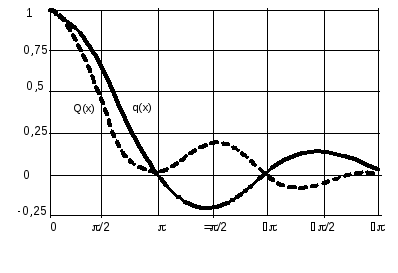
Рис. 20.20. Сигнальная функция для оценки точности определения частоты пары когерентных радиоимпульсов
На рис. 20.20 для сравнения нанесена сигнальная функция и для одиночного радиоимпульса. Как видно, вероятность аномальных ошибок при определении частоты сигнала по паре импульсов примерно такая же, как и при наблюдении одиночного импульса с той же энергией сигнала, но наиболее вероятное значение аномальной ошибки иное. Кроме того, видно, что и при одинаковой энергетике точность определения частоты при наблюдении пары импульсов (крутизна сигнальной функции в точке истинного значения частоты =0) оказывается выше, чем для одиночного импульса.
Для крайнего случая, когда N>>1 иТп>>1, из следует, что

На рис. 20.21 приведен график зависимости q10() дляN=10.
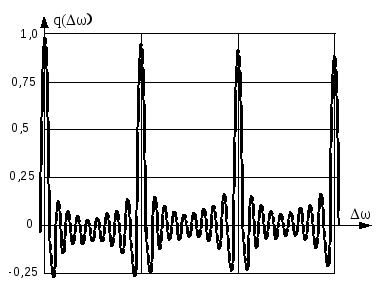
Рис. 20.21. Сигнальная функция q10() при большом N=10
Исследование этой функции показывает,
что функция q()
спадает до нуля при![]() ,
но в точках
,
но в точках![]() ,k=1,2… опять возрастает
до значений, близких к единице.
Следовательно, здесь точность оценки
будет тем большей, чем больше полная
длительность сигналаТс=NTп,
но вероятность аномальной ошибки
существенно выше. Очевидно, что если бы
сигнал излучался непрерывно в течение
времениТс(сохраняя ту же
полную энергию), то достигалась бы почти
такая же точность, но измерения вероятность
аномальных ошибок была бы меньше. Этот
вывод отражает известный факт о том,
что, импульсный режим не выгоден для
измерения смещения частоты.
,k=1,2… опять возрастает
до значений, близких к единице.
Следовательно, здесь точность оценки
будет тем большей, чем больше полная
длительность сигналаТс=NTп,
но вероятность аномальной ошибки
существенно выше. Очевидно, что если бы
сигнал излучался непрерывно в течение
времениТс(сохраняя ту же
полную энергию), то достигалась бы почти
такая же точность, но измерения вероятность
аномальных ошибок была бы меньше. Этот
вывод отражает известный факт о том,
что, импульсный режим не выгоден для
измерения смещения частоты.
Важное практическое значение имеет оценка точности совместного определения временных характеристик и несущей частоты широкополосных сигналов (сигналов с базой В=fT>>1). Как уже отмечалось, при измерении временной задержки сигнальная и автокорреляционная функции полностью совпадают, и требование быстрого спада сигнальной функции в данном случае эквивалентно требованию расширения спектра сигнала. Поэтому чем шире спектр излучаемого сигнала, тем точнее с его помощью можно измерить характеристику момента времени (прихода, задержки, начала и конца сигнала и/или его элемента). Расширить спектр сигнала можно разными путями, например, можно укорачивать импульсы в сигнале. Но более перспективный путь – формирование широкополосного непрерывного сигнала за счет применения специальной фазовой или частотной модуляции. В качестве примера можно рассмотреть непрерывный сигнал, который получится при модуляции несущего колебания по фазе импульсно-временными кодами (ИВК). При прямоугольной форме импульсов фаза несущего колебания может принимать только два значения. Чаще всего эти два дискретных значения отличаются на. Тогда аналитическая модель радиосигнала представляется в виде
![]() ,
,
где П'(t) - последовательность ИВК, каждый из которых состоит из М положительных и отрицательных импульсов. В зависимости от значения символа соответствующего кода П'(t)=1 (рис. 20.22). На рис. 20.22 для примера изображена функция П'(t), полученная из семисимвольной последовательности Баркера 1110010.
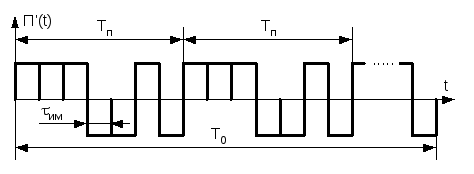
Рис. 20.22. Структура псевдошумового кода, полученного на основе последовательности Баркера {110010}
Радиосигнал, модулированный последовательностью П'(t), наблюдается средством разведки в течение времениТс. Длительность одного периода ИВК модулирующей функцииТп, длительность одного символа последовательности П'(t)Тим. За времяТссовершаетсяNпериодов ИВК т.е.Тс=NТп=NMtим.
При измерении задержки сигнальная функция радиосигнала, модулированного последовательностью П'(t)в будет, по определению

где
![]() ,=-i.
,=-i.
После тривиальных преобразований в пренебрежении интегралом ха большое время Тсот аддитивной составляющей, осциллирующей с двойной несущей частотой сигнала, из получается

Сигнальная функция q() в данном случае представляет собой высокочастотное колебание частоты, умноженное на сравнительно медленно меняющуюся функциюQ(), которая зависит только от вида используемого ИВК. Для приведенного на рис. 20.22 примера псевдошумового кода Баркера при М=7 достаточно вычислить интеграл в дискретных точках=0,им, 2им, …iим, поскольку в промежуточных точках соответствующая функцияQ() получается путем соединения отрезками прямых линий.
Все псевдошумовые коды, предназначенные для измерения временной задержки, синхронизации или гаммирования обладают общим свойством: их сигнальная функция резко уменьшается при сдвиге на один символ и остается в дальнейшем малой величиной, пока сдвиг не становится кратным длительности периода псевдошумового кода Тп. При этом
![]()
так же, как в случае периодической последовательности импульсов. Все это позволяет сконструировать форму сигнальной функции для сигнала с расширением спектра последовательностью кода Баркера в форме рис. 20.23.

Рис. 20.23. Огибающая автокорреляционной функции пачки из N кодов Баркера
В промежуточных точках (=iимkTп)
автокорреляционная функция кода Баркера
может иметь только отрицательные
значения, причем приNэти значения приближаются к![]() .
Из графика функции Q()
приn=7,N=3, приведенного
на рис. 20.23, видно, что точность
определения временного интервала по
сигналу ПШ-ФМ зависит от длительности
импульсаим,
а вероятность аномальной ошибки - от
длительности одного псевдошумового
кодаТп.
.
Из графика функции Q()
приn=7,N=3, приведенного
на рис. 20.23, видно, что точность
определения временного интервала по
сигналу ПШ-ФМ зависит от длительности
импульсаим,
а вероятность аномальной ошибки - от
длительности одного псевдошумового
кодаТп.
Понятно поэтому стремление при выборе
сигналов в процессе проектировании
систем найти такие коды, которые имели
бы большие значения М=![]() (высокую информативность), сохраняя при
этом и высокую надежность, т.е. стойкость
к аномальным ошибкам - малые промежуточные
выбросы сигнальной функции приимТп-им.
Для рассматриваемого кода абсолютное
значение максимального промежуточного
выброса равно
(высокую информативность), сохраняя при
этом и высокую надежность, т.е. стойкость
к аномальным ошибкам - малые промежуточные
выбросы сигнальной функции приимТп-им.
Для рассматриваемого кода абсолютное
значение максимального промежуточного
выброса равно![]() .
Таким же свойством обладают и другие
коды Баркера. Для навязывания аномальных
ошибок средству разведки нужно
стимулировать в точности обратную
ситуацию.
.
Таким же свойством обладают и другие
коды Баркера. Для навязывания аномальных
ошибок средству разведки нужно
стимулировать в точности обратную
ситуацию.
Таким образом, проведенный анализ позволяет сформулировать следующий порядок выбора сигналов, удовлетворяющих условиям точности измерения параметров радиосигнала.
Сформировать аналитическую модель исследуемого сигнала и выделить информативный параметр (параметры) .
Вычислить сигнальную функцию по информативному параметру q().
Определить разницу уровней главного и наибольшего из боковых максимумов сигнальной функции.
Найти вероятность того, что при заданном соотношении сигнал/шум действие помехи приведет к тому, что боковой выброс оценки сигнальной функции превысит уровень оценки главного лепестка, или определить уровень помехи, при котором оценка бокового лепестка сигнальной функции превзойдет оценку главного лепестка с заданной вероятностью.