

5.2. Техническая характеристика пр (гост 25378 - 82)
Техническая характеристика содержит следующие основные показатели:
номинальная грузоподъемность, кг;
тип привода;
число степеней подвижности;
геометрическая характеристика рабочей зоны;
тип системы управления;
максимальная абсолютная погрешность позиционирования, мм;
надежность и др.
Показатели привода:
давление рабочего тела Р, МПа;
расход рабочего тела Q, м3 /с;
напряжение питания U, В;
потребляемая мощность W, Вт.
Показатели степени подвижности:
максимальное перемещение L, , мм, град;
время перемещения t, с;
максимальная скорость V, , м/с, град/с;
максимальное ускорение a, ε, м/с2, град/с2;
максимальная абсолютная погрешность позиционирования , мм.
Показатели устройства управления:
объем памяти;
число одновременно управляемых движений по степеням подвижности;
число каналов связи с внешним оборудованием:
на вход nвх;
на выход nвых.
число программируемых точек:
при прямом ходе – nпр;
при обратном ходе – nобр.
Показатели захватного устройства:
усилия захватывания S, Н;
время захватывания tзахв, с;
время отпускания tотп с;
характерные размеры захватываемого предмета:
максимальный диаметр – dmax, мм;
минимальный диаметр – dmin, мм.
Показатели надежности:
установленная безотказная наработка t, ч (наработка на отказ);
установленный срок службы:
до капитального ремонта Ткап, лет;
до списания Тсп, лет.
Массогабаритные показатели:
масса m, кг;
габаритные размеры L1х L2х L3, мм3.
Глава 6. Структура, классификация и основы кинематики манипуляционных систем промышленных роботов
6.1. Структура манипуляторов промышленных роботов
Манипулятор – это кинематическая цепь, образованная последовательным или последовательно-параллельным соединением тел, называемых кинематическими звеньями, и предназначенная для преобразования движения этих звеньев в требуемое (заданное) движение схвата. При этом кинематические звенья соединяются друг с другом подвижно с помощью кинематических пар.
Кинематическая цепь, образующая манипулятор, имеет два оконечных звена: одно из них будет являться основанием – стойкой (ему присваивается нулевой номер), а другое оконечное звено оснащается схватом. Этому оконечному звену присваивается последний n-й номер, равный при последовательном соединении звеньев числу подвижных звеньев манипулятора.
Дадим определение тем новым терминам, которые уже использованы.
Кинематическое звено – совокупность жестко соединенных друг с другом тел, входящих в состав механизма, в данном случае в состав манипулятора.
Кинематическая пара – подвижное соединение двух кинематических звеньев, допускающее их вполне определенное движение относительно друг друга.
Э лементы
кинематической пары – поверхности,
линии или точки, по которым соприкасаются
звенья, образующие данную кинематическую
пару.
лементы
кинематической пары – поверхности,
линии или точки, по которым соприкасаются
звенья, образующие данную кинематическую
пару.
Кинематическая цепь – это совокупность кинематических звеньев, подвижно соединенных друг с другом с помощью кинематических пар.
Если в кинематической цепи есть кинематические звенья, входящие в одну кинематическую пару, то такая цепь называется разомкнутой, а если же каждое звено входит, как минимум, в две кинематических пары, то это замкнутая кинематическая цепь.
Манипулятор может быть образован как на основе разомкнутой кинематической цепи (рис. 6.1) с последовательным соединением звеньев (антропоморфные человекоподобные роботы) и на основе замкнутой кинематической цепи (рис. 6.2) с последовательно-параллельным соединением звеньев (роботы с параллельной кинематикой, в частности, гексаподы на основе платформы Стюарта).
Итак, манипулятор – это механизм, представляющий собой разомкнутую или замкнутую кинематическую цепь, предназначенную для получения требуемого движения схвата в пространстве.
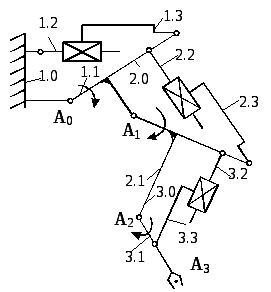
Рис. 6.2. Манипулятор с параллельной кинематикой
Дадим характеристику кинематическим парам. Именно от характера кинематических пар и от их взаимного расположения в манипуляторе зависят законы преобразования движения.
Кинематические пары, как отмечалось, допускают вполне определенные движения образующих их звеньев относительно друг друга. Эта определенность достигается теми ограничениями, которые создают пары геометрией своих элементов.
Пары классифицируют по классам, номер которого равен числу ограничений (числу условий связи), накладываемых данной парой:
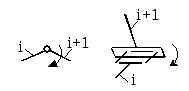
одно ограничение (одно условие связи) – пара I класса;
![]()
два ограничения (два условия связи) – пара II класса;
![]()
три ограничения (три условия связи) – пара III класса;

четыре ограничения (четыре условия связи) – пара IV класса;
пять ограничений (пять условий связи) – пара V класса (пары пятого класса могут быть поступательными и вращательными).
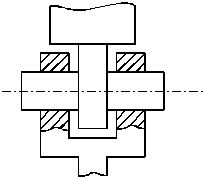
Поступательная пара
V
класса Вращательная пара
V
класса
Приведем примеры условных обозначений кинематических пар пятого класса как наиболее часто используемых в манипуляторах ПР.
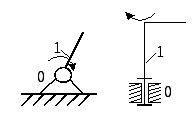
Вращательная пара, соединяющая подвижные звенья
Вращательная пара, соединяющая неподвижное звено (стойку) с подвижным
Поступательная пара, соединяющая подвижные звенья
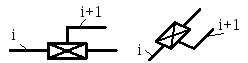
Поступательная пара, соединяющая неподвижное звено (стойку) с подвижным
Важной характеристикой манипулятора является число степеней его подвижности, число степеней свободы.
Для произвольной кинематической цепи следует использовать формулу Сомова – Малышева.
![]() ,
,
где pi – число кинематических пар i-го класса.
Для манипуляторов с кинематическими парами 5- го класса
![]() .
.
Например, для манипулятора, представленного на рисунке 6.1:
![]() .
.
Так
как в манипуляторе с последовательной
кинематикой каждому подвижному звену
соответствует одна кинематическая пара
пятого класса, то
![]() .
Следовательно,
.
Следовательно,![]() или
или![]() ,
то есть число степеней подвижности в
таких манипуляторах равно числу
подвижных звеньев и числу кинематических
пар.
,
то есть число степеней подвижности в
таких манипуляторах равно числу
подвижных звеньев и числу кинематических
пар.
Использование в манипуляторах в основном одноподвижных вращательных или поступательных пар 5-го класса связано с тем, что для определенности движения одного звена относительно другого в случае, если они подвижно соединены парой 5-го класса требуется задание одного перемещения (рис. 6.3), что легко реализуется современными двигателями, которые приводят в движение либо вал (электродвигатели), либо шток (пневмо- и гидродвигатели).
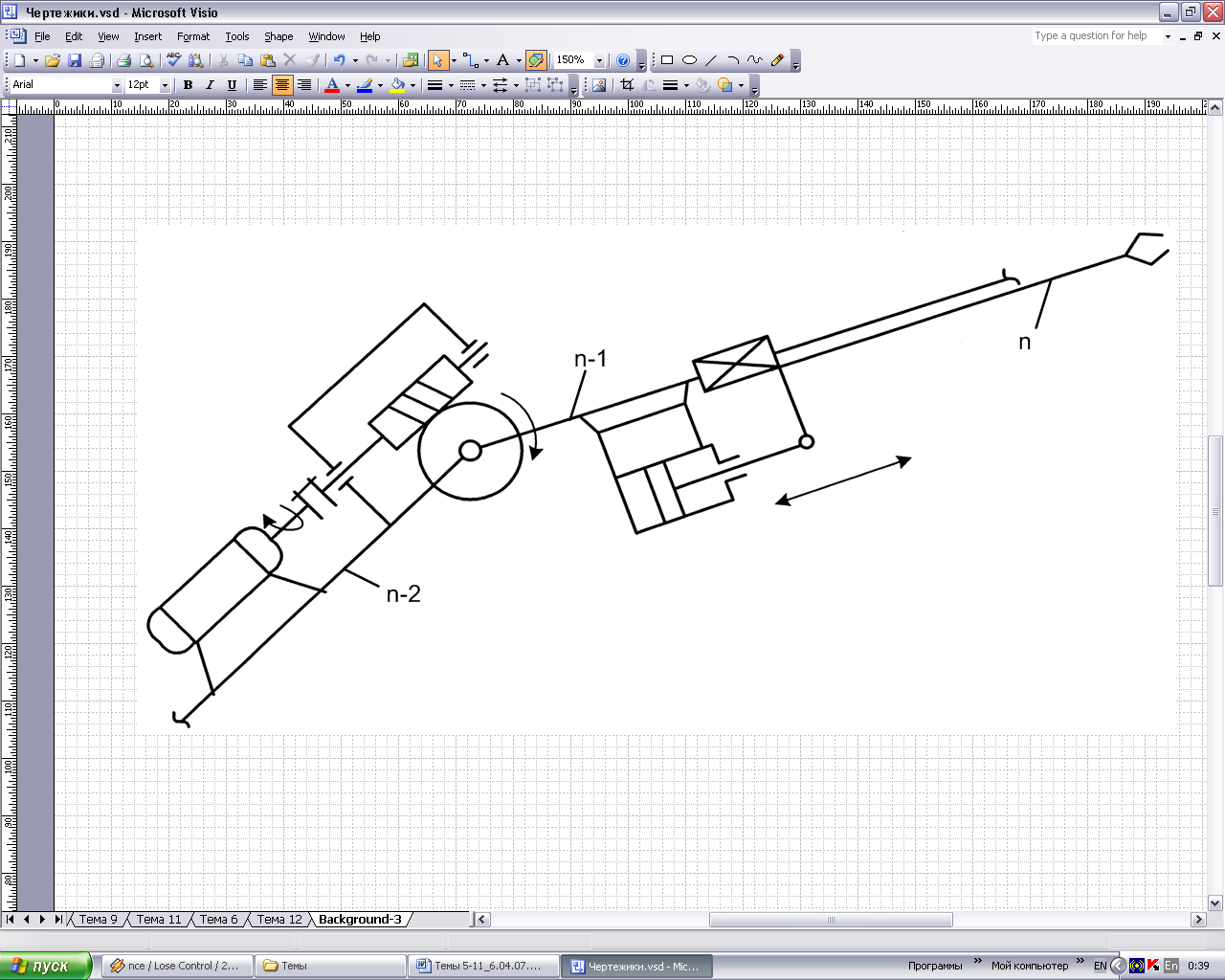
Рис. 6.3. Схема расположения приводов на звеньях манипулятора