

2.4. Технологические машины – гексаподы
Мехатронный подход положен в основу машин с концептуально новым принципом построения – так называемых гексаподов. Эти технологические машины (станки, координатно-измерительные машины, роботы) имеют стержневую конструкцию и построены на мехатронных модулях линейного движения, в основе их конструктивной схемы лежит платформа Стюарта.
Станок-гексапод (рис. 2.4а) выполнен на базе линейных мехатронных модулей 2, которые осуществляют осевое перемещение винтов через шарико-винтовые передачи (ШВП). Один конец ШВП соединен безлюфтовым шарниром с нижней платформой 1, а другой – с подвижной верхней платформой 4, на которой расположен рабочий орган – инструментальная головка 3. Управляя положением винтов (рис. 2.4б), можно обеспечить пространственное перемещение рабочего органа по шести степеням свободы (отсюда и название станка: «гекса» – означает «шесть» по-гречески). Основными преимуществами гексаподных машин являются:
сокращение времени подготовки производства и повышение его рентабельности за счет объединения обрабатывающих, разметочных и измерительных функций в единой мехатронной системе;
высокая точность измерений и обработки, которая обеспечивается повышенной жесткостью стержневых механизмов (до 5 раз), применением прецизионных датчиков обратной связи и лазерных измерительных систем, использованием компьютерных методов коррекции (например, тепловых воздействий);
повышенная скорость движений (скорость быстрых перемещений достигает 10 м/с, рабочих движений – до 2,5 м/с);
отсутствие направляющих (в качестве несущих элементов конструкции используются приводные механизмы), отсюда улучшенные массогабаритные характеристики и материалоемкость;
высокая степень унификации мехатронных узлов, обеспечивающая технологичность изготовления и сборки машины и конструктивную гибкость;
высокое качество управления движением благодаря малой инерционности механизмов, применению линейных мехатронных модулей движения как объектов управления, использованию методов автоматизированной подготовки и исполнения в реальном времени управляющих программ, наличию дружелюбного интерфейса «человек-машина».
а)
б)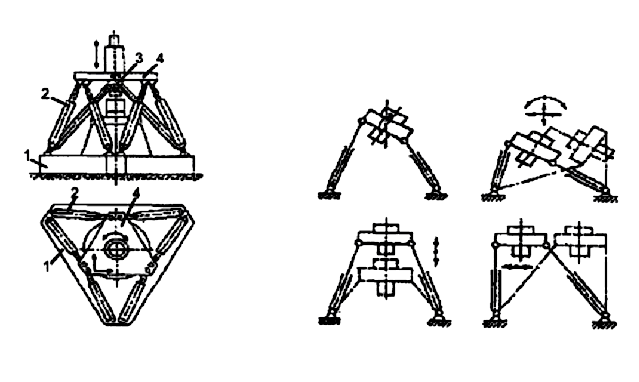
Рис. 2.4. Общий вид станка-гексапода (а) и его конфигурации (б)
Примером отечественной технологической машины-гексапода является прецизионное оборудование, предлагаемое АО «ЛАПИК» (г. Саратов). Фирма выпускает на единой конструктивной базе гексаподы двух типов: координатно-измерительные машины (КИМ) и технологические модули (ТМ) для механообработки (рис. 2.5).
Рис. 2.5. Общий вид технологической машины-гексапода
Технологические модули предназначены для фасонной обработки с высокой точностью изделий методами фрезерования, шлифования, сверления, полирования, а также для выполнения операций гравировки, растачивания, разметки. Рабочая зона гексаподов-ТМ варьируется у различных моделей в диапазонах: по оси X – от 500 мм до 3000 мм, по оси Y – от 400 мм до 1400 мм, по оси Z – от 350 мм до 750 мм. Максимальный угол поворота подвижной платформы относительно каждой из осей составляет в серийных моделях 30 град, скорость ее движения управляется программно в интервале 0,01–120 мм/с.
Гексаподы имеют весьма эффективные массогабаритные показатели по сравнению со станками традиционной компоновки. Так, ТМ-500 при габаритах 1800x1550x2300 мм имеет массу 2800 кг, а наиболее мощный ТМ-3000 имеет габариты 5000x3500x3800 мм при массе 6500 кг. На ТМ устанавливаются мехатронные модули типа «мотор-шпиндель» мощностью от 1,5 кВт до 5 кВт с регулируемой частотой вращения в диапазонах 200–12000 об/мин, либо 600–24000 об/мин.
Контрольно-измерительные машины выполняют автоматические измерения и контроль размеров деталей (в том числе легкодеформируемых изделий) от конструкторских или технологических баз. Погрешности измерений для КИМ-500 (машина базового исполнения) не превышают 0,8 мм (линейные измерения, размер L = 300 мм) и 1,5 мм для пространственных измерений (L = 250 мм). В машинах специального прецизионного исполнения эти показатели достигают соответственно 0,3 мм и 0,5 мм (при размерах L = 500 мм). Измерения выполняются с помощью специальной головки-щупа, оснащенной датчиками механического или токового касания. Контактное усилие при токовом касании не превышает 0,0003 Н, что позволяет измерять податливые и мелкоструктурные детали.
Дальнейшее развитие технологических машин-гексаподов связано с применением интеллектуальных линейных мехатронных модулей, а также с созданием эффективного математического и программного обеспечения для решения задач планирования и управления их движением в реальном времени.