6.3.4. Устройство сигнального прибора (прибор вг-6)
Прибор ВГ-6 предназначен для подачи световой сигнализация о неисправностях гирокомпаса, а также для автоматической выработки сигнала интегрального управления
U5=K5![]() βгdt.
βгdt.
Этот сигнал обеспечивает дополнительную закрутку горизонтальных торсионов для компенсации переменного азимутального дрейфа гиросферы.
Внешний вид прибора ВГ-6 показан на рис.6.13, Снаружи на корпусе 4 установлены штепсельный разъем 5 и ручка З замка. На крышке 1 установлены сигнальные табло 2 с надписями (сверху вниз): “ИГ на упоре”, “Перегрев”, “Неисправ. след. сист.”, “Откл. питания”, “ИК на пределе”.
Внутри корпуса 4 (см. рис. 6.14) расположены два узла. В первый узел – сигнальное устройство – входят блоки и элементы сигнальной системы гирокомпаса. Во второй – интегратор, включены элементы и блоки, с помощью которых осуществляется формирование сигнала интегрального управления.
На внутренней стороне крышки размещены следующие элементы сигнального устройства: сигнальные лампы 1, панель 2 с микросхемами и резисторы.
П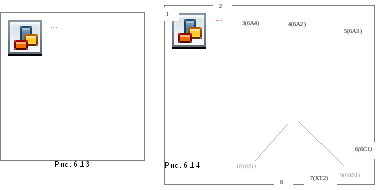 анель7(ХТ2)управления и контроля прибора
ВГ-6 размещена внутри корпуса, в его
нижней части (рис.6.14).
анель7(ХТ2)управления и контроля прибора
ВГ-6 размещена внутри корпуса, в его
нижней части (рис.6.14).
В интегрирующее устройство входят блоки 3(6А4), 5(6АЗ)и 6(6S1). В блоке3размещена электромеханическая часть интегратора, которая включает в себя интегрирующий двигатель, редуктор и датчик угла, а также механически связанные с ним контактную группу и две шкалы 8 (рис. 6.14).
Блок 5является усилителем интегрирующею устройства. Остальные электроэлементы интегратора размещены на панели управления7(ХТ2).
Выключатель 10(6S1) отключает питание обмотки возбуждения интегрирующего двигателя и переводит интегратор в режим памяти.
К элементам сигнальной системы, размещённым в корпусе прибора ВГ-6, относятся два блока (6А1и6А2) контроля сигнальной системы (БКСС-1) и кнопка 9(6SВ1). Оперативная кнопка 6SВ1 позволяет контролировать исправность всех сигнальных табло, находящихся в ВГ-6.
6.4. Системный состав гирокомпаса
В основном приборе ВГ-1Б размещены несколько самостоятельных по назначению систем:
— гироскопический чувствительный элемент 15 (гиросфера) и система его подвеса (рис. 6.15);
— двухканальная система косвенного управления стабилизированным гироблоком, сообщающая ему свойство избирательности по отношению к меридиану;
— двухканальная следящая система;
— двухканальная система коррекции;
— система термостабилизации гирокомпаса;
— система ускоренного приведения гироблока в меридиан;
— система трансляции курса;
— контрольно-сигнальная система;
— система питания.
6.4.1. Гироскопический чувствительный элемент и система его подвеса
Схема подвеса гиросферы и гироблока показана на рис. 6.15. Ротор 18, выполненный в виде двух симметрично расположенных маховиков, подвешен на подшипниках в герметичной камере 15 (гиросфере). Гиросфера 15 с помощью пары горизонтальных торсионов 26 подвешена в кардановом кольце 19, которое, в свою очередь, с помощью пары вертикальных торсионов 20 подвешено в корпусе гироблока 14. Таким образом, ротор гироскопа имеет три степени свободы относительно корпуса гироблока.
Пространство между гиросферой и корпусом гироблока заполнено поддерживающей жидкостью. Плотность поддерживающей жидкости подобрана таким образом, чтобы при рабочей температуре гиросфера имела нулевую плавучесть. Гиросферу тщательно балансируют. Центр масс гиросферы совпадает с ее геометрическим центром и, следовательно, она не имеет маятниковости.
Корпус 14 с подвешенной в нем гиросферой 15 образует гироблок. Корпус гироблока жестко закреплен в установочном кольце 12. Это кольцо является частью внешнего карданова подвеса, обеспечивающего корпусу гироблока три степени свободы относительно корпуса прибора.
К нижней части корпуса гироблока прикреплен массивный маятниковый груз 32, который смещает центр масс G гироблока относительно оси ОХК подвеса установочного кольца. Благодаря этому обеспечивается маятниковая стабилизация гироблока относительно оси ОХ собственного вращения ротора гироскопа при наклонах корпуса прибора.
— установочное кольцо 12 подвешено на горизонтальных цапфах 9, соосных оси ОХГ гироблока, в подшипниках 8 горизонтального карданова кольца 11;
— горизонтальное карданово кольцо 11 на горизонтальных цапфах 29, перпендикулярных цапфам установочного кольца, подвешено в подшипниках 28 вертикального кольца 6. С горизонтальным кольцом 11 через редуктор 30 связан двигатель горизонтной стабилизации 31(1M1), установленный на вертикальном кольце 6;
— вертикальное карданово кольцо 6, выполненное в виде вилки, установлено на вертикальной цапфе 2 в подшипниках (на рис. не показано) основания 33 гиросекции.
С вертикальным кольцом 6 через редуктор 5 связан двигатель азимутальной стабилизации 1(1М2), также размещенный на основании 33 гиросекции. С двигателем 1(1М2) механически связаны датчики курса 3(1ВС2) и 4(1ВС1).
Рис. 6.15
32
33