

OTIP
.pdfДинамические свойства измерительных приборов описываются
динамическими характеристиками.
Динамические характеристики по признаку полноты описания свойств разделяют на полные и частные. Полные динамические характеристики
однозначно определяют изменение выходного сигнала y(t) измерительного прибора при любых изменениях во времени входного сигнала x(t) и влияющих величин. К полным динамическим характеристикам относятся:
дифференциальное уравнение f1( yn , yn−1, ..., y, t) = f2 (xm , xm−1, ..., x, t) , где n и
m – соответственно порядок производных по времени выходного и входного сигналов; импульсная переходная функция h(t); передаточная функция W(p); совокупность амплитудно- A(ω) и фазочастотных φ(ω) характеристик. Частные динамические характеристики представляют собой функционалы или параметры полных динамических характеристик измерительного прибора, например, постоянная времени, время запаздывания установления выходного параметра.
Полные динамические характеристики однозначно взаимосвязаны между собой. Достаточно рассчитать одну из них, чтобы путем математических преобразований получить другую. Наиболее широко применяются дифференциальное уравнение и передаточная функция. Динамические характеристики систем можно свести к характеристикам нескольких типовых звеньев или их комбинаций.
Под типовым динамическим звеном понимается устройство любого физического принципа действия и конструктивного исполнения (механическое, электрическое, акустическое и др.), работа которого описывается определенным дифференциальным уравнением. К основным типовым динамическим звеньям относятся: усилительное, дифференцирующее, интегрирующее, инерционное колебательное и др. (табл. 1.1.).
Передаточная функция W(p) измерительного прибора, представляющего собой динамическую систему, составляется с учетом характера соединения ее элементарных звеньев (см. рис. 1.2). При последовательном соединении передаточные функции Wi(p) элементарных звеньев перемножают:
n |
|
|
|
|
n |
W ( p) = ∏Wi ( p) ; при |
параллельном |
– складывают: |
W ( p) = ∑Wi ( p) ; при |
||
i=1 |
|
|
|
|
i=1 |
встречно-параллельном |
соединении |
передаточную функцию W(p) системы |
|||
|
|
W1( p) |
|
||
находят по формуле W ( p) = |
|
, где W1(p) |
– общая передаточная |
||
1mW ( p)W ( p) |
|||||
|
1 |
2 |
|
|
|
функция цепи прямого преобразования; W2(p) – общая передаточная функция цепи обратной связи. При смешанном соединении звеньев структурную схему измерительного прибора упрощают методом последовательных преобразований, заменяя группы звеньев с рассмотренными видами соединения на эквивалентные звенья.
11
|
|
|
|
|
|
|
|
|
Характеристики типовых динамических звеньев |
Таблица 1.1 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Наименование |
|
|
|
Дифференциальное |
|
Передаточная |
Примеры реализации типовых динамических |
||||||||||||||||||
звена |
|
|
|
|
|
уравнение |
|
|
|
|
функция |
|
звеньев |
|
|||||||||||
|
|
|
|
|
y(t) = S x(t) |
|
W ( p) = S |
Усилители, делители тока и напряжения, мостовые |
|||||||||||||||||
Усилительное |
|
|
|
|
|
схемы, рычажные, зубчатые и другие механические |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
передачи |
|
|
|
|
|
|
|
y(t) |
= |
S |
dx(t) |
|
W ( p) = Sp |
Тахогенераторы, дифференцирующие RC и LC |
||||||||||||||
Дифференцирующее |
|
|
|
|
|
контуры, включенные в обратную связь |
|||||||||||||||||||
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
операционного усилителя |
|
||||
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
W ( p) = |
S |
|
|
|
|
Электродвигатели |
шаговой |
конструкции, |
|||
Интегрирующее |
|
|
|
|
y(t) = S∫ x(t)dt |
|
|
|
|
|
реверсивные датчики, интегрирующие RC и LC |
||||||||||||||
|
|
|
|
|
p |
||||||||||||||||||||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
контуры в цепях обратной связи |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
T |
dy |
+ |
y |
= |
S |
|
x |
|
W ( p) = |
|
S |
|
Чувствительные элементы многих приборов, |
|||||||
Инерционное |
|
|
|
|
|
|
пневматические, |
гидравлические |
элементы, |
||||||||||||||||
|
|
|
|
|
1+Tp |
||||||||||||||||||||
|
|
|
|
|
dt |
|
|
|
|
|
|
|
электронные цепи типа RC и LC |
|
|||||||||||
Реальное |
|
|
|
|
|
dy |
|
|
|
dx |
|
W ( p) = |
Sp |
|
|
|
|||||||||
дифференцирующее |
|
|
|
T |
|
+ y = S dt |
|
|
|
|
|
|
|
||||||||||||
|
|
|
dt |
|
1+Tp |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Системы, содержащие квазиупругие, инерционные |
||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
и диссипативные элементы, между которыми |
||||
Колебательное |
d |
|
y |
+ 2d ω |
dy + ω2 |
|
y = Sω2 |
x |
W ( p) = |
|
|
Sωо |
|
происходит обмен энергией. Электроизмерительные |
|||||||||||
|
|
p2 + 2d ωo p + ωо2 |
|||||||||||||||||||||||
|
dt2 |
|
|
o dt |
|
o |
|
o |
|
|
механиз-мы, электромеханические осциллографы, |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
акселерометры, виброметры |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В чистом виде практически не существует, |
||
|
|
|
|
|
d 2 y |
|
dy |
|
|
|
|
|
|
|
|
S |
используется для моделирования механи-ческих и |
||||||||
|
|
|
|
T |
|
= S x |
|
W ( p) = |
|
|
электромеханических устройств (электро-, гидро-, |
||||||||||||||
Двигательное |
|
|
|
dt2 |
+ dt |
|
|
|
пневмодвигатели), в которых угол поворота |
||||||||||||||||
|
|
|
|
p(1+Tp) |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
выходного звена является интегралом от входного |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
напряжения |
|
|
3
2.ПОГРЕШНОСТИ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ
2.1.Классификация погрешностей
Одной из основных характеристик, определяющих функционирование измерительных приборов и систем, является точность работы. Измерительные приборы обеспечивают измерение физической величины с некоторым приближением. Степень приближения полученных результатов измерений к истинному значению измеряемой величины называется точностью измерения. Количественно точность измерения может оцениваться обратным значением модуля относительной погрешности, выраженной в процентах.
Погрешностью измерения называется разность между выходным сигналом y(t) измерительного прибора и истинным значением yo(t) измеряемой величины
y(t) = y(t) − yo (t) . |
(2.1) |
Математическая модель истинного значения измеряемой величины получается из выражения реальной информационной модели измерительного прибора
y(t) = F[x(t), ξ(t), q(η(t), θ(t)), ν(t)] |
(2.2) |
при допущении, что возмущающие факторы имеют фиксированные значения ξо, θо, ηо, νо, т.е. эта модель имеет вид
|
|
yo (t) = F[x(t), ξo , q(ηo , θo ), νo ]. |
|
(2.3) |
||||||
Подставляя (2.2) |
и |
(2.3) |
|
в |
(2.1) и |
разлагая в ряд Тейлора функцию |
||||
F[x(t), ξ(t), q(η(t), θ(t)), ν(t)] |
по переменным ξ, θ, η, ν в окрестности ξо, θо, ηо, νо, |
|||||||||
получим математическую модель погрешности измерительного прибора |
|
|||||||||
∂F |
|
∂F |
|
∂F |
∂q |
η+ |
|
|||
y = |
|
ξ+ |
|
|
q + |
|
|
|||
|
∂ξ ξ=ξo |
|
∂q q=qo |
∂q |
∂η η=ηo |
|
|
|||
|
|
|
+ |
∂F |
∂q |
|
∂F |
ν+ f (t) , |
(2.4) |
|
|
|
|
|
|
|
θ+ |
|
|||
|
|
|
|
|
∂q |
∂θ θ=θo |
|
∂ν ν=νo |
|
|
где f(t) – слагаемое, учитывающее динамическую погрешность и неточность задания функции преобразования.
Погрешности измерительных приборов классифицируют в зависимости от различных признаков: вида параметров измерительного прибора; порождающей причины; характера проявления и повторяемости при многократных измерениях, размерности и др. Классификация погрешностей измерительных приборов приведена в табл. 2.1.
Следует заметить, что погрешности прибора едины. Деление погрешностей на различные виды позволяет учесть их особенности и свойства. Например, инструментальные погрешности могут быть систематическими и случайными, аддитивными и мультипликативными.
При создании приборов и оценке их показаний необходимо знать величины погрешностей, причины, их порождающие, и методы уменьшения погрешностей.
13
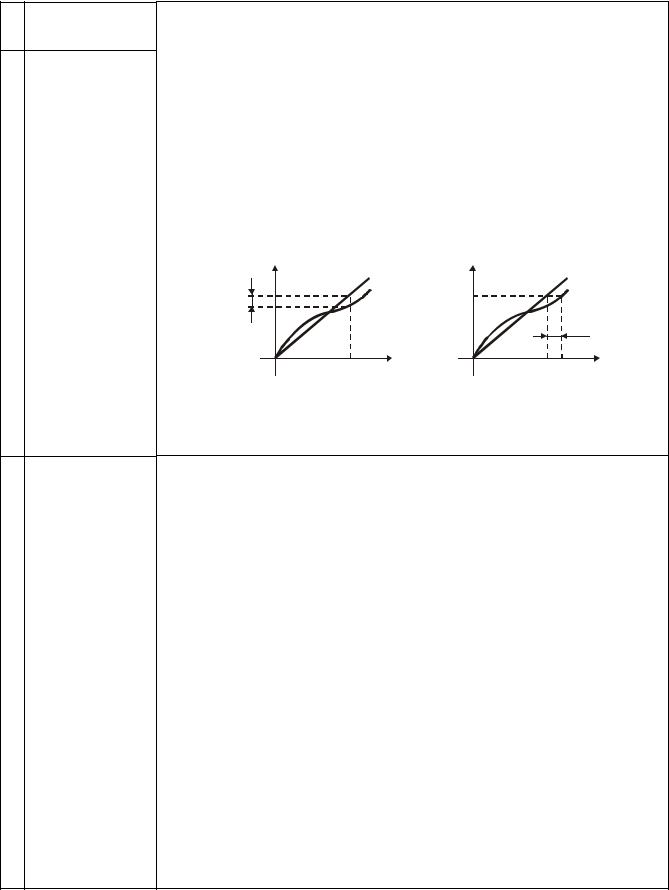
Таблица 2.1 Классификация погрешностей измерительных приборов
№ Критерий классификации
1Вид
параметров измерительного прибора
2Порождающая
причина
Виды погрешностей
Погрешность выходных параметров – разность между требуемыми и действительными значениями выходных параметров (рис. 2.1а).
Погрешность входных параметров – разность между требуемыми и действительными значениями входных параметров (рис. 2.1б).
Погрешности входных параметров, внесенные в процессе проектирования, конструирования и изготовления, называются первичными.
y |
yо |
y |
y |
|
x |
0 |
x* |
|
а) |
y |
yо |
y* |
y |
|
x |
|
x |
0 |
б) |
|
Рис. 2.1. Погрешности параметров: а – выходных, б – входных
Методические погрешности возникают из-за несовершенства метода измерений (погрешность метода), из-за приближений, допускаемых при проектировании прибора (погрешность схемы), а также из-за неоднозначной связи между измеряемой величиной и величиной, воспринимаемой чувствительным элементом прибора.
Инструментальные погрешности зависят от изменения параметров системы и характеристик материалов, несовершенства технологии изготовления приборов. К таким погрешностям относятся погрешности от несоответствия параметров прибора номинальным значениям: производственно-технологические и погрешности от внешних возмущений; погрешности от действия внутренних дестабилизирующих факторов (материально-структурные).
Эксплуатационные погрешности зависят от условий эксплуатации прибора и делятся на основные, возникающие в приборе при нормальных условиях работы и дополнительные, возникающие при отклонениях условий работы от нормальных
14

Продолжение табл. 2.1
№ |
Критерий |
Виды погрешностей |
|
|
|
||
классификации |
|
|
|
||||
3 |
Размерность |
Абсолютная погрешность: |
y = y(t) − yo (t) или выраже- |
||||
|
величины |
ние (2.4). |
|
|
|
|
|
|
|
Относительная погрешность: |
δ = |
y y |
– |
отношение |
|
|
|
абсолютной погрешности |
измерения |
к |
истинному |
||
|
|
(действительному) значению измеряемой величины. |
|||||
|
|
Приведенная погрешность: |
γ = y |
y* |
– |
отношение |
|
абсолютной погрешности измерения к нормирующему значению измеряемого параметра (конечному значению рабочей части шкалы прибора; сумме конечных значений рабочей части шкалы, если нулевая отметка находится внутри шкалы; номинальному значению измеряемого параметра и др.)
4 Характер связи |
Аддитивные погрешности: значения погрешностей не |
|||
между |
зависят от |
величин |
измеряемых сигналов – yа = const |
|
погрешностью |
(рис. 2.2а). |
|
|
|
и величиной |
Неаддитивные погрешности: значения погрешностей |
|||
измеряемого |
||||
зависят от величин измеряемых сигналов. Эти погрешности |
||||
сигнала |
разделяются на |
|
||
|
|
|||
|
– мультипликативные – пропорциональные измеряемой |
|||
|
величине |
yм = A x , |
где А – постоянный коэффициент |
|
|
(рис. 2.2б); |
|
|
|
|
– степенные – погрешности, пропорциональные измеряе- |
|||
|
мому сигналу в степени выше первой yст = B xn , где В – |
|||
|
постоянный коэффициент, n ≥ 2 ; |
|||
|
– периодические – |
yпер = f (x + τ) , где τ – период (имеют |
||
место в приборах с круговыми шкалами).
y |
yо |
y |
yо |
|
yм |
||
|
|
||
|
|
|
yм |
yа |
x |
|
x |
|
|
||
0 |
yа |
0 |
x* |
|
|
б) |
|
|
а) |
|
Рис. 2.2. Погрешности:
а – аддитивная, б –мультипликативная
15

№ Критерий классификации
5Повторяемость
при
многократных
измерениях
6Характер изменения во времени
Окончание табл. 2.1
Виды погрешностей
Систематические погрешности остаются неизменными или закономерно изменяются.
Случайные погрешности изменяются случайным образом
Статические погрешности возникают при установив-
шемся режиме измерения, когда измеряемая величина x и выходной сигнал y сохраняют постоянное значение.
Динамические погрешности имеют место при неустановившемся режиме измерения. Под динамической погрешностью понимают ту часть погрешности, которая добавляется к статической погрешности в неустановившемся режиме измерения.
Общая погрешность в неустановившемся режиме измерения равна сумме статической и динамической погрешностей y = yст + yдин
2.2. Причины возникновения статических погрешностей
Погрешность измерительного прибора возникает вследствие того, что не удается обеспечить равенство его заданной и индивидуальной характеристик Fинд(x) = Fо(x). После задания требуемой характеристики в процессе
проектирования объекта осуществляется его структурный и параметрический синтез, формируется номинальная расчетная характеристика, которая затем при изготовлении прибора в соответствии с установленными в конструкторской документации допусками преобразуется в индивидуальную. Прибор эксплуатируется в реальных условиях, не всегда соответствующих нормальным, что также влияет на погрешность показаний.
Следовательно, погрешности измерительного прибора проявляются на всех этапах его жизненного цикла. На этапе проектирования при проведении анализа точности необходимо выявить и оценить отдельные составляющие погрешности с целью определения полной погрешности прибора.
Методическая погрешность (погрешность приближения) возникает в результате того, что при проектировании объекта с целью его упрощения вместо заданной характеристики реализуется приближенная функция преобразования. Это происходит тогда, когда невозможно или нецелесообразно точно реализовать заданную характеристику. Погрешность приближения не зависит от качества и точности изготовления элементов прибора, имеет систематический характер, одинаковый для всех приборов данного типа.
16
Погрешность приближения появляется в следующих случаях:
•при проектировании кинематической или электрической схемы прибора, в которой заданная, как правило, линейная характеристика реализуется приближенно звеньями с нелинейными функциями преобразования; в этом случае погрешность приближения называют погрешностью схемы; примерами приборов с такой погрешностью являются нелинейные рычажно-зубчатые индикаторы с равномерной шкалой (синусные или тангенсные механизмы), электрические приборы для измерения неэлектрических величин, построенные на базе неуравновешенного моста с нелинейной характеристикой;
•при использовании косвенного метода измерения, при котором измерительный прибор воспринимает вместо измеряемой величины некоторую другую, связанную с ней известной функциональной зависимостью; если выбранная формула косвенного метода измерения реализует заданную характеристику приближенно или параметры, входящие в нее не остаются постоянными, то возникающая при этом погрешность является погрешностью метода измерения; погрешность метода имеется в термоэлектрическом термометре вследствие вариации температуры холодного спая;
•в измерительных приборах с дискретным выходным сигналом, когда непрерывная величина квантуется по времени или по уровню.
Введение на этапе структурного синтеза погрешности приближения при
выполнении определенных условий по ее минимизации, как не парадоксально, приводит к значительному технико-экономическому положительному эффекту, обусловленному упрощением конструкции и технологии изготовления измерительного прибора. В результате повышается точность изготовления и сборки деталей и узлов, суммарная погрешность при этом оказывается меньше, чем у объекта с точной, но сложной схемой (небольшая погрешность приближения значительно перекрывается уменьшением технологических погрешностей). Кроме того, в связи с упрощением схемы повышается надежность и снижается себестоимость проектируемого устройства.
Инструментальные погрешности зависят от несовершенства технологического процесса изготовления прибора, от изменения геометрических размеров и физических параметров элементов прибора при изменении окружающих условий, от изменения характеристик прибора при изменении режимов питания.
• Погрешности от несоответствия параметров прибора номинальным значениям приводят к несоответствию индивидуальной характеристики прибора номинальной расчетной. Источниками причин, вызывающих погрешности производственно-технологического типа, являются:
– неидентичность технологических процессов и первичных компонентов, используемых при производстве материалов для деталей, что приводит к разбросу физических параметров, характеризующих свойства этих материалов
17
(плотности, модуля упругости, удельного электрического сопротивления, магнитной проницаемости и др.);
–несовершенство технологических процессов и неточность оборудования, применяемых при изготовлении деталей и элементов, что вызывает рассеивание их геометрических размеров;
–несовершенство сборочных, регулировочных и контрольных устройств и операций, что обуславливает погрешности узлов и блоков при их сборке и регулировке.
Производственно-технологические погрешности имеют случайный характер, и их исследуют вероятностными и статистическими методами.
Кчислу погрешностей от несоответствия параметров номинальным значениям относятся также погрешности из-за износа деталей и старения материалов и погрешности от внешних возмущающих воздействий (помех).
Влияющими факторами являются:
–климатические (температура, влажность, давление);
–механические (наклоны, переносные линейные и угловые ускорения, удары, вибрация);
–параметры режимов питания (напряжение, частота, давление, расход);
–параметры внешних полей (магнитных, электрических, радиационных, гравитационных).
Приведенные факторы, воздействуя на значения внутренних параметров прибора, искажают его показания. Например, повышение температуры вызывает изменение линейных размеров деталей, упругих свойств материалов, электрического сопротивления проводников, что в свою очередь приводит к непостоянству функции преобразования прибора и к появлению указанной составляющей погрешности. Исключить действие внешних возмущений невозможно, поэтому погрешность данного типа всегда присутствует. Она является случайной, хотя может иметь существенную систематическую составляющую, например, температурную погрешность.
Если влияющие факторы изменяются в пределах, оговоренных нормальными условиями, то учет этих факторов производится на этапе расчета основной погрешности. Если изменения выходят за указанные пределы, то их учитывают при определении дополнительных погрешностей.
• |
Погрешности от действия |
внутренних |
дестабилизирующих |
||
факторов |
(материально-структурные) |
возникают |
под |
влиянием |
|
дополнительных (вредных) воздействий, не предусмотренных принципом действия прибора, что приводит к нарушению механического или электрического равновесия измерительных цепей.
Для механизмов приборов источниками вредных воздействий могут быть все дополнительные силы и моменты сил:
–силы и моменты сил трения в опорах, направляющих и шарнирных соединениях;
–силы и моменты от неуравновешенности подвижной системы;
18
– силы и моменты от взаимодействия подвижной системы с внутренними магнитными и электрическими полями;
–аэродинамические, гидродинамические силы и моменты, возникающие при обтекании подвижной системы воздушными или газовыми потоками;
–гидростатические силы (при расположении подвижной системы в жидкости) и т. п.
Для электронных и электромеханических цепей причинами таких воздействий являются:
–паразитные термо-ЭДС в соединениях разнородных проводников;
–сопротивления утечек;
–паразитные индуктивные и емкостные связи;
–внутренние шумы радиоэлектронных элементов и т. п.
Погрешности рассматриваемого типа носят случайный характер.
2.3. Причины возникновения динамических погрешностей
Основные причины возникновения динамических погрешностей аналогичны рассмотренным выше, при этом, однако, имеются специфические особенности. Остановимся на них подробнее.
Основная динамическая погрешность подразделяется на собственную и вынужденную.
•Источниками собственной динамической погрешности являются инерционные и демпфирующие элементы, характеризуемые определенными параметрами (массой, моментом инерции, электрической емкостью и индуктивностью, теплоемкостью и т. п.). Наличие в измерительных цепях указанных элементов приводит к запаздыванию процесса преобразования и передачи информации, а также к динамическим искажениям выходного сигнала.
В механических измерительных цепях, имеющих подвижную систему, основной причиной погрешности являются инерционные массы. В случае преобразования тепловых величин имеет место запаздывание в установлении температуры из-за теплоемкости чувствительных и преобразующих элементов. В электрических цепях к источникам динамического искажения сигнала относятся емкости, индуктивности, взаимные индуктивности. Наличие нелинейностей в измерительной цепи (люфтов, гистерезиса, релейных элементов и др.) приводит к нелинейному запаздыванию.
•Вынужденная динамическая погрешность появляется из-за внутренних шумов и наводок, под влиянием которых в измерительной цепи генерируется паразитная переменная составляющая сигнала. В отличие от собственной погрешности, которая имеет место только при изменении входной величины, вынужденная погрешность в виде переменной составляющей сигнала присутствует даже в том случае, когда входная
19
величина сохраняет постоянное значение (автоколебательные режимы работы, шумы отдельных элементов).
Дополнительная динамическая погрешность возникает при отклонении условий работы прибора от нормальных и при воздействии на прибор дополнительных внешних возмущений. Рассмотрим примеры влияния различных факторов.
•Климатические воздействия: при колебаниях температуры в механической подвижной системе с жидкостным демпфированием существенно изменяется вязкость жидкости и соответственно коэффициент демпфирования, что проявляется в изменении степени успокоения подвижной системы и длительности переходного процесса.
•Механические воздействия оказывают вредное влияние на устройства, содержащие механическую подвижную систему:
–линейная вибрация: если подвижная система не уравновешена, то под действием вибраций возникает знакопеременная инерционная сила, раскачивающая систему, что приводит к появлению переменной составляющей выходного сигнала; при наличии люфтов в опорах, направляющих или шарнирных соединениях возникают нелинейные колебания подвижной системы, которые могут сопровождаться эффектом детектирования с односторонним смещением выходного сигнала;
–угловая вибрация (крутильные колебания): если ось колебаний совпадает или параллельна оси вращения подвижной системы, то при совпадении частот колебаний появляется переменная составляющая сигнала, причем ее амплитуда может быть очень значительной; если оси не параллельны, то наряду с переменной составляющей появляется постоянное смещение выходного сигнала;
–линейные и угловые переносные ускорения вызывают увеличение сил и моментов трения в подвижных элементах, приводят к изменению собственной частоты колебаний механической системы.
•Электрические и электромагнитные воздействия:
–наличие паразитных параметрических (резистивных, индуктивных, взаимоиндуктивных, емкостных) связей между проводами внешней кабельной сети приводит к наложению на полезный электрический сигнал помех с различным частотным спектром;
–внешние поля создают наводки в электрических цепях;
–пульсация напряжения питания электронных приборов служит причиной появления переменной составляющей в выходном сигнале.
•Сопровождающие помехи на входе прибора: если на вход прибора подается измеряемая величина, на которую наложена аддитивная помеха с каким-либо частотным спектром, то в соответствии с передаточной функцией эта помеха, ослабленная или усиленная, обязательно проходит на выход и создает дополнительную динамическую погрешность.
20