

4. Движение катка со скольжением. Определение коэффициента скольжения. Зона скольжения, кинематика и динамика процесса, характер взаимодействия катка с почвой.
Е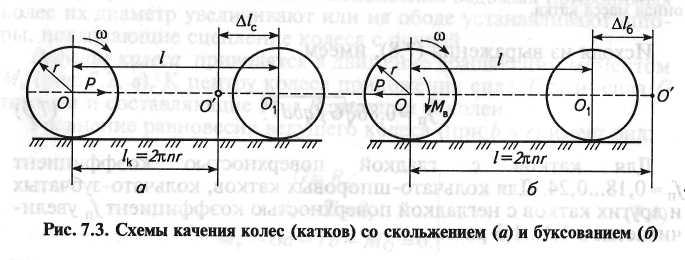 сли
путьl,
пройденный центром О колеса (катка) за
n
его оборотов равен произведению длины
дуги окружности колеса на число оборотов
(2πn),
то такое движение принято считать
качением без скольжения и буксования.
Когда l >
2πrn, то качение
происходит со скольжением. Такое движение
характерно для катков. Скольжение катков
(колес) оценивают коэффициентом
скольжения εс,
выражая его соотношением: εс=(l
- 2πrn)/l
=Δlc
/ l,
где Δlc
–путь, пройденный катком скольжением.
сли
путьl,
пройденный центром О колеса (катка) за
n
его оборотов равен произведению длины
дуги окружности колеса на число оборотов
(2πn),
то такое движение принято считать
качением без скольжения и буксования.
Когда l >
2πrn, то качение
происходит со скольжением. Такое движение
характерно для катков. Скольжение катков
(колес) оценивают коэффициентом
скольжения εс,
выражая его соотношением: εс=(l
- 2πrn)/l
=Δlc
/ l,
где Δlc
–путь, пройденный катком скольжением.
Коэффициент εс скольжения изменяется от 0 до 1. Его значение зависит от свойств почвы, конструкции катков, силы тяжести, действующей на колесо, и моментов MО (момент сопротивления трения в опорах оси) и МП (вращающий, приводной момент). На песчаных и взрыхленных почвах εс больше, чем на уплотненных стерневых, черноземах и подзолах. Увеличение диаметра катка, ведомых и приводных колес снижает значение коэффициента εс. Катки и приводные колеса с почвозацепами скользят меньше.
Для гладких катков, применяемых при обработке почвы до и после посева, коэффициент εс = 7...10%. Катки зерновых сеялок, передающих момент МП на вал привода высевающих аппаратов, работают с коэффициентом скольжения εс = 4...6%
Р еактивные
силы. Катки
и колеса движутся по поверхности почвы
с образованием колеи. При качении точки
обода поворачиваются относительно
мгновенного центра скоростей С. Абсолютная
скорость движения любой точки равна
произведению угловой скорости ω
на ее расстояние (радиус-вектор) от
центра С. Например, для точки А абсолютная
скорость VA
= ωρA
и направлена перпендикулярно
радиусу-вектору.
еактивные
силы. Катки
и колеса движутся по поверхности почвы
с образованием колеи. При качении точки
обода поворачиваются относительно
мгновенного центра скоростей С. Абсолютная
скорость движения любой точки равна
произведению угловой скорости ω
на ее расстояние (радиус-вектор) от
центра С. Например, для точки А абсолютная
скорость VA
= ωρA
и направлена перпендикулярно
радиусу-вектору.
Линия действия абсолютных скоростей отклонена от элементарных сил Ni нормального давления на различные углы φ, т. е. при качении колеса со стороны колеи на ободе действуют не только реактивные нормальные Ni но и касательные силы трения Fi направленные против вращения. Значения этих сил возрастают при увеличении сил Ni и угла φ от 0 при ф φ = 0 до Fi =f Ni где f— коэффициент трения скольжения почвы по ободу. Результирующая Ri нормальных Ni и касательных Fi сил отклонена от нормали в сторону, обратную направлению вращения колеса.
Движущие моменты и моменты сопротивления. При качении ведомых колес (катков) на них действует вертикальная сила G тяжести катка и частей машины, результирующая R (реакции колеи), а также момент MО сопротивления трения в опорах оси.
Разложив силу R по осям Х и Y, получим две пары PRX и GRY. Момент Рb первой пары (движущий момент) стремится вращать каток, а второй момент Ga оказывает сопротивление качению катка. Наряду с ним сопротивляется качению момент Мо.
При равномерном качении ведомых катков имеем следующую систему уравнений:
G = RY P=RX Pb = Ga + M0
Принимая b ~ г, из третьего уравнения системы находим P=( Ga + MО )/r
Сила Р сопротивления качению уменьшается с увеличением радиуса r катков и глубины колеи, она больше на легких (песчаных и супесчаных) почвах. Малые значения сил Р на ведомых управляемых колесах могут вызвать снижение управляемости движением машины, поэтому обод управляемых колес выполняют с ребордами.
Ведомые приводимые колеса передают вращающий (приводной) момент МП рабочим или вспомогательным узлам машины. С учетом моментов MО и MП имеем P = (Ga+M0+MП)/r.
Для устранения возможного скольжения ведомых приводимых колес их диаметр увеличивают или на ободе устанавливают шпоры, повышающие сцепление колеса с почвой.
Выражение для обобщенной силы Р в зависимости от объемного коэффициента q смятия почвы и параметров колеса эмпирически обосновал В. Грандвуане, а теоретически вывел В. П. Горячкин. Обобщенную силу сопротивления качения катков и колес выражают следующей формулой: P=0,86(G4/(qbd2))1/3
где q - коэффициент объемного смятия почвы; b - ширина обода колеса; d - диаметр колеса.
Сила Р уменьшается с увеличением коэффициента q объемного смятия почвы, ширины b обода и диаметра d колеса.
Увеличение параметров q, b и d снижает глубину колеи. С ростом нагрузки G, действующей на каток или колеса, сила Р повышается с нарастающей интенсивностью.
При расчетах пользуются упрощенной зависимостью P=fП G=fП∙9,8m,
где fП — коэффициент сопротивления качению катков; m — эксплуатационная масса катка.
Следовательно: fП=0,86(G/(qbd2))1/3
Для катков с гладкой поверхностью коэффициент fП = 0,18...0,24. Для кольчато-шпоровых катков, кольчато-зубчатых и других катков с негладкой поверхностью коэффициент fП, увеличивается в 1,1...1,3 раза.
5. Движущий момент сопротивления катка. Зависимость тягового сопротивления от параметров катка и свойств почвы (формула Грандвуане – Горячкина), глубина колеи. Взаимодействие с почвой катка с жестким ободом и пневматической шиной.
Д вижущие
моменты и моменты сопротивления.
При качении ведомых колес (катков)
на них действует вертикальная сила G
тяжести катка и частей машины,
результирующая R
(реакции колеи), а также момент MО
сопротивления трения в опорах оси.
вижущие
моменты и моменты сопротивления.
При качении ведомых колес (катков)
на них действует вертикальная сила G
тяжести катка и частей машины,
результирующая R
(реакции колеи), а также момент MО
сопротивления трения в опорах оси.
Разложив силу R по осям Х и Y, получим две пары PRX и GRY. Момент Рb первой пары (движущий момент) стремится вращать каток, а второй момент Ga оказывает сопротивление качению катка. Наряду с ним сопротивляется качению момент Мо.
При равномерном качении ведомых катков имеем следующую систему уравнений:
G = RY
P=RX
Pb = Ga + M0
Принимая b ~ r, из третьего уравнения системы находим P=( Ga + MО )/r
Сила Р сопротивления качению уменьшается с увеличением радиуса r катков и глубины колеи, она больше на легких (песчаных и супесчаных) почвах. Малые значения сил Р на ведомых управляемых колесах могут вызвать снижение управляемости движением машины, поэтому обод управляемых колес выполняют с ребордами.
Ведомые приводимые колеса передают вращающий (приводной) момент МП рабочим или вспомогательным узлам машины. С учетом моментов MО и MП имеем P = (Ga+M0+MП)/r.
Для устранения возможного скольжения ведомых приводимых колес их диаметр увеличивают или на ободе устанавливают шпоры, повышающие сцепление колеса с почвой.
Ведущие колеса приводятся в движение вращающим моментом Mв К центру колеса приложения сила Т тяги, сила G тяжести и составляющие RX и RY реакции R колеи.
Уравнение равновесия ведущего колеса (при b ~ r) имеет вид:
G=Ry RX-T=0 MB-Ga-Tb-M0=0
Представив вращающий момент МВ как произведение силы Р, приложенной к центру колеса, на радиус г, получим
Pr = Ga+Tb+M0=0, или P = (Ga + Tb+ M0)/r.
Из выражений следует, что катки, ведомые и ведущие колеса можно рассчитывать по силе Р условного тягового сопротивления.
Выражение для обобщенной силы Р в зависимости от объемного коэффициента q смятия почвы и параметров колеса эмпирически обосновал В. Грандвуане, а теоретически вывел В. П. Горячкин. Обобщенную силу сопротивления качения катков и колес выражают следующей формулой: P=0,86(G4/(qbd2))1/3
где q - коэффициент объемного смятия почвы; b - ширина обода колеса; d - диаметр колеса.
Сила Р уменьшается с увеличением коэффициента q объемного смятия почвы, ширины b обода и диаметра d колеса.
Увеличение параметров q, b и d снижает глубину колеи. С ростом нагрузки G, действующей на каток или колеса, сила Р повышается с нарастающей интенсивностью.
При расчетах пользуются упрощенной зависимостью P=fП G=fП∙9,8m,
где fП — коэффициент сопротивления качению катков; m — эксплуатационная масса катка.
Следовательно: fП=0,86(G/(qbd2))1/3
Для катков с гладкой поверхностью коэффициент fП = 0,18...0,24. Для кольчато-шпоровых катков, кольчато-зубчатых и других катков с негладкой поверхностью коэффициент fП, увеличивается в 1,1...1,3 раза
Коэффициент fП, сопротивления перекатыванию колес с пневматическими шинами, как правило, меньше, чем колес с жестким ободом. Его значение зависит от свойств и состояния поля, параметров колеса и внутреннего давления в шинах. Для свежевспаханного поля коэффициент fП = 0,20...0,28, луга - 0,09...0,11, стерни - 0,10...0,18, укатанной дороги - 0,04...0,07, а для асфальтированной дороги - 0,03...0,04.
С уменьшением внутреннего давления в шинах самоходных машин, работающих в поле, коэффициент fП снижается. Для транспортных машин давление рТ следует увеличивать, чтобы уменьшить гистерезисные потери из-за деформации шин.
В.П.Горячкин считал, что между реакцией почвы на элемент обода и деформацией существует прямая пропорциональная зависимость. В соответствии с этим получены следующее выражение для определения глубины колеи: h=0,65(G2/(q2b2d))1/3
6. Плотность почвы и ее влияние на плодородие, методы борьбы с уплотнением почвы.
Плотность сухой почвы: ρс.п.=mс/V,
где mс и V— масса и объем абсолютно сухой почвы с ненарушенным сложением.
Оптимальная плотность для зерновых колосовых культур составляет (1,1...1,3)∙103 кг/м3, картофеля —(1,0...1,2) ∙103 кг/м3, сахарной свеклы —(1,1...1,5) ∙103 кг/м3.
Изменение плотности ведет к резкому снижению урожайности. При многократных проходах по полю сельскохозяйственной техники происходит значительное уплотнение почвы, а следовательно это ведет к уменьшению урожайности, вплоть до возникновения условий, когда растение не будет иметь условий для жизни и развития.
Основными направлениями на снижение вредного воздействия являются:
-использование комбинированных и широкозахватных агрегатов
-технологии возделывания по постоянной технологической колее
-создание условий, чтобы не образовывались эрозионноопасные частицы, d<0,01 мм
7. Плужной корпус имеет параметры: max=50O 0=38О. К какому типу относится рабочая поверхность плужного корпуса.
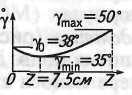
Зависимость изменения угла γ от высоты расположения образующей Z для полувинтовых поверхностей.
Δγ = γmax - γ0=50-38=12º - полувинтовая поверхность (Δγ=7…12º)
Цилиндроидальная полувинтовая поверхность.