

10. Условие равновесия навесной почвообрабатывающей машины в вертикальной плоскости.
Силы, действующие на плуги, их равновесие. Устойчивый ход плугов и других машин зависит от силового взаимодействия машины с трактором.
Рассмотрим равновесие при работе плуга, приняв следующие условия: плуг движется равномерно и прямолинейно на заданной глубине; силы, действующие на плуг, приняты сосредоточенными в заданных точках и не изменяются по значению и направлению; усилия в нижних тягах CD механизма навески направлены вдоль тяг, которые не ограничены от большого перемещения цепями; распределитель гидросистемы находится в плавающем положении, глубина пахоты задана положением опорных колес плуга Устойчивое равновесие возможно, если многоугольник действующих сил замкнут, а их равнодействующая проходит через мгновенный центр вращения плуга.
Навесной плуг, агрегатируемый с трактором, в процессе работы может поворачиваться в двух плоскостях: в продольно-вертикальной и горизонтальной.
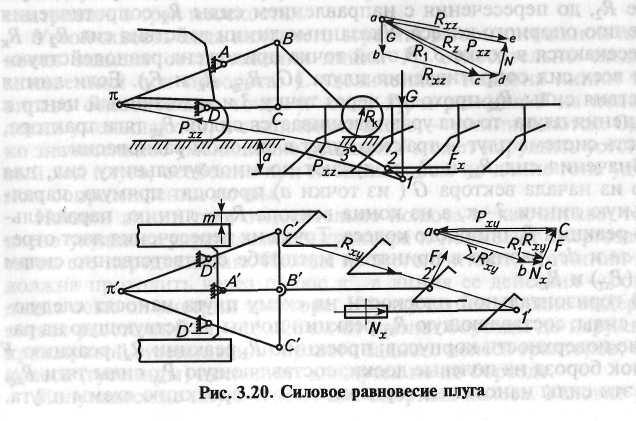
В продольно-вертикальной плоскости XOZ (рис. 3.20) на плуг действуют сила тяжести G, суммарная реакция Rxz почвы на рабочие поверхности корпусов, результирующая сила Fx трения полевых досок о стенки борозд, реакция RK почвы на колесо и сила Pxz тяги трактора.
Силу тяжести G принимают по справочным материалам или рассчитывают по зависимости G = 9,8lmoabn,
где mo - относительная масса плуга, mo = (2,0...3,5)103кг/м2. Меньшие значения mo соответствуют трех- четырехкорпусным навесным плугам, большие — оборотным и прицепным. Линия действия силы тяжести G проходит посредине корпусов.
Значение и направление реакции Rxz находят из соотношения Rz/Rx = 0,18...0,22, а силу Ry - из выражения Ry= (0,25...0,45)Rх, при этом силу Rx определяют по формуле. Из приведенных
соотношений следует, что реакция Rxz наклонена под углом 10... 12° к оси X. В горизонтальной плоскости реакция Rxz с осью X образует угол 15...25°. Точку приложения силы Rxz располагают на расстоянии 1/2 от дна борозды на линии между средними лемехами при четном числе корпусов или у среднего лемеха при нечетном.
Силу Fx трения выражают как произведение коэффициента / (f~ 0,5) и силы Ry, которую определяют из зависимости. Силу Fx располагают посередине ширины полевой доски, направляя ее вдоль оси X.
Линия реакции RK проходит через ось опорного колеса под углом δК к ней, причем tg δК = fП, тд, fП — коэффициент сопротивления перекатыванию колеса. На плотных почвах fП = 0,08...0,10, на рыхлых - fП = 0,12...0,20. Если в машине не одно, а два или три колеса, находят суммарную реакцию на все колеса.
Определив точки приложения и направление линий действия сил G, Rxz и Fx, их наносят в принятом масштабе на проекции схемы плуга, отдельно от схемы строят многоугольник сил.
Вначале находят силу R1 складывая известные по значению и направлению векторы G и Rxz, затем на схеме плуга из точки 1 пересечения линий действия сил G и Rxz проводят прямую, параллельную линии действия равнодействующей R1. Эта прямая пересечет силы Fx трения в точке 2.
На многоугольнике сил из конца вектора R1 откладывают вектор силы Fx (отрезок cd). Сложением векторов R1 и Fx получают равнодействующую R2.
На схеме плуга через точку 2 проводят линию, параллельную силе R2, до пересечения с направлением силы RK сопротивления качению опорного колеса. Указанные линии действия сил R2 и RK пересекаются в точке 3. В этой точке приложена равнодействующая всех сил сопротивления плуга (G, Rxz, RK и Fx). Если линия действия силы Rxz проходит через точку 3 и мгновенный центр π вращения плуга, то она уравновешивается силой Рхz тяги трактора, то есть система плуг - трактор будет в силовом равновесии.
Значения сил Rxz и Pxz получают по многоугольнику сил, для чего из начала вектора G ( из точки а) проводят прямую, параллельную линии 3-π, а из конца вектора R2 - линию, параллельную реакции RK опорного колеса. Точка их пересечения даст отрезок ае и de, равные в принятом масштабе соответственно силам Rx (Pxz) и RK.