

БАЛТИЙСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ «ВОЕНМЕХ» им. Д. Ф. УСТИНОВА
Кафедра систем обработки информации и управления
В.Ю. Емельянов
УПРАВЛЕНИЕ В ТЕХНИЧЕСКИХ СИСТЕМАХ
Конспект лекций
Санкт-Петербург
2008
|
СОДЕРЖАНИЕ |
|
стр. |
|
Лекция 1. Основные понятия теории автоматического управления, виды |
||
|
|
||
задач управления, фундаментальные принципы управления. Показатели |
|
||
качества управления. Базовый пример системы управления . . . . |
3 |
||
Лекция 2. Передаточные функции и частотные характеристики динами- |
|
||
ческих звеньев и систем . . . . . . . . . . . . . . |
7 |
||
Лекция 3. Структурно-динамическая схема системы. Типовые соедине- |
|
||
ния динамических звеньев. Передаточные функции замкнутых систем |
9 |
||
Лекция 4. Основные положения теории устойчивости. Алгебраические |
|
||
методы анализа устойчивости линейных систем управления |
. . . |
13 |
|
Лекция 5. Частотные методы анализа устойчивости систем управления |
15 |
||
Лекция 6. Оценка точности систем управления. Понятия астатизма и ин- |
|
||
вариантности . . . . . . . . . . . . . . . . |
21 |
||
Лекция 7. Назначение, принципы построения и основные особенности |
|
||
компьютерных систем управления . . . . . . . . . . . |
23 |
||
Лекция 8. Математическая модель импульсного элемента. Решетчатые |
|
||
функции и разностные уравнения . . . . . . . . . . . |
26 |
||
Лекция 9. Дискретные преобразования и их свойства . . . . . |
29 |
||
Лекция 10. Передаточные функции импульсных звеньев и систем . . |
34 |
||
Лекция 11. Анализ устойчивости и качества импульсных систем . . |
37 |
||
Лекция 12. Особенности построения математических моделей компью- |
|
||
терных систем управления. Методы линеаризации . . . . . . |
43 |
||
Лекция 13. Передаточные функции компьютерных систем управления |
48 |
||
Лекция 14. Синтез системы управления. Обеспечение точности системы |
52 |
||
Лекция 15. Синтез системы управления. Обеспечение запаса устойчиво- |
|
||
сти системы . . . . . . . . . . . . . . . . . |
55 |
||
Лекция 16. Синтез системы управления. Обеспечение запаса устойчиво- |
|
||
сти системы (продолжение) . . . . . . . . . . . . . |
59 |
||
Лекция 17. Применение типовых ЛАХ при синтезе цифровых систем |
|
||
управления . . . . . . . . . . . . . . . . . |
62 |
||
. |
|
|
|
Лекция 18. Непрерывные корректирующие звенья . . . . . . |
65 |
||
Лекция 19. Синтез непрерывных корректирующих средств . . . . |
71 |
||
Лекция 20. Синтез компьютерного управления . . . . . . . |
72 |
||
Лекция 21. Постановка задачи оптимального управления . . . . |
76 |
||
Лекция 22. Синтез оптимального управления на основе вариационного |
|
||
исчисления . . . . . . . . . . . . . . . . . |
79 |
||
Лекция 23. Синтез линейного регулятора, оптимального по квадратич- |
|
||
ному критерию . . . . . . . . . . . . . . . . |
83 |
||
Лекция 24. Каноническая форма уравнений Эйлера. Принцип максиму- |
|
||
ма |
. . . . . . . . . . . . . . . . . . . |
86 |
|
. |
|
|
|
2
Лекция 25. Синтез системы стабилизации, оптимальной по быстродей-
ствию . . . . . . . . . . . . . . . . . . . 89
.
3
Лекция 1. Основные понятия теории автоматического управления, виды задач управления, фундаментальные принципы управления. Показатели качества управления. Базовый пример системы управления
Управление - это воздействие на объект с целью обеспечения требуемого течения процесса в объекте или требуемого изменения его состояния.
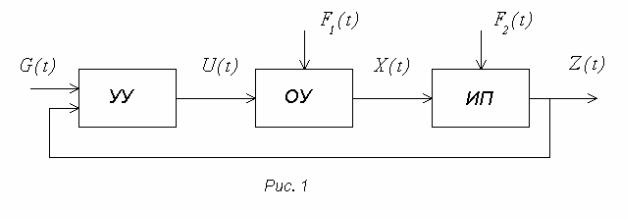
На рис. 1: ОУ - объект управления, УУ - устройство управления (регуля- тор), ИП - измерительная подсистема, G - задающее воздействие (требуемое состояние ОУ), X - текущее состояние ОУ (вектор переменных состояния), Z - измеренный вектор состояния, U - сигнал управления (вектор управления), F1 - вектор возмущающих воздействий, F2 - вектор шумов (помех) измерения.
Основные виды задач управления:
-стабилизация (регулирование) G=const;
-программное управление G=G( t);
-слежение (сопровождение, наведение) G = X ц (t), где X ц (t) - состояние
другого объекта (цели);
-терминальное управление - требуется обеспечить заданное состояние объекта в определенный (конечный) момент времени T;
-экстремальное управление - в процессе управления требуется обеспе- чить максимум или минимум некоторых характеристик, например, при про- граммном управлении обеспечить минимальный расход топлива.
Решение указанных задач управления основано на использовании в раз- ных вариантах двух фундаментальных принципов: принципа обратной связи и принципа компенсации возмущений.
Принцип обратной связи состоит в сравнении текущего состояния объек- та управления X с требуемым G и формировании сигнала управления на основе различия между ними. Основной и простейший вариант реализации данного принципа - единичная отрицательная обратная связь (рис. 2). На входе УУ
формируется разность x(t) = g(t) − y(t), где y - выходной сигнал системы, характеризующий ее состояние, x - сигнал ошибки. Другие варианты обратной
4

связи: неединичная, гибкая, положительная применяются для повышения каче- ства процесса управления.
Принцип компенсации возмущений состоит в формировании сигнала управления с учетом как величины задающего воздействия, так и
величины возмущающих воздействий (рис. 3).
Благодаря этому может быть обеспечена высокая точность системы управления, но реализация
этого принципа затруднена необходимостью точного измерения произвольно из-
меняющихся возмущающих воздействий. На практике данный принцип применя- ется, как правило, в сочета-
нии с принципом обратной связи.
В теории управления рассматриваются два ос- новных класса задач: зада-
чи анализа и синтеза систем управления. Задачи анализа сводятся к оценке устойчивости и качества системы. Задачи синтеза - к обеспе-
чению у проектируемой системы указанных свойств.
Показатели качества систем управления можно разделить на четыре ос- новные группы:
-показатели точности,
-показатели быстродействия,
-показатели запаса устойчивости,
-комплексные показатели качества.
В конкретных практических задачах могут вводиться другие виды пока- зателей качества.
Рассмотрим пример системы самонаведения летательного аппарата (ЛА). На рис. 4: Xц = (xц , yц ,zц ) - вектор линейных координат цели (Ц); К - коор-
динатор, формирующий сигнал самонаведения σ; УУ - устройство управления (автопилот и рулевые машины), формирующее вектор управляющих сигналов
для ЛА δ = (δв ,δн ,δэ ) на основе σ и вектора измеренных координат ЛА Z; X - вектор линейных и угловых координат ЛА; ИП - измерительная подсистема.
5
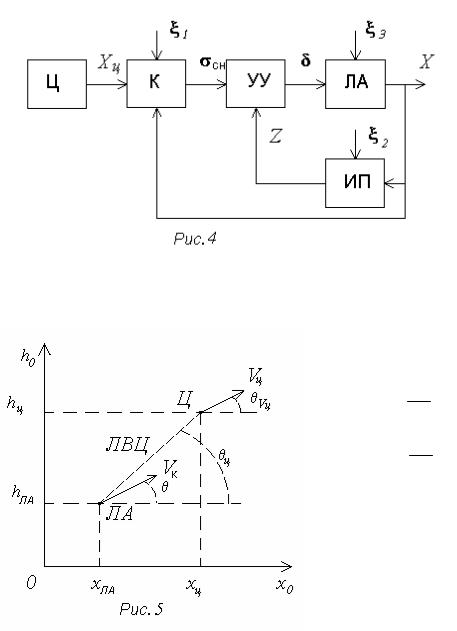
Отметим, что в процессе управления ЛА необходимо параллельно решать две задачи управления: обеспечивать стабилизацию углового положения ЛА и наведение на цель. Соответственно на рис. 4 показаны два контура управления.
Задачи управ- ления здесь прихо- дится решать при на-
личии возмущающих воздействий: ξ1 - ес-
тественные и органи-
зованные помехи для
координатора; |
ξ 2 - |
шумы измерений для информационной
подсистемы; |
ξ 3 - |
внешние силы и мо-
менты, действующие на ЛА (ветер и др.).
Составим математическую модель системы, ограничиваясь вертикальной плоскостью (рис. 5). Текущие значения линейных координат ЛА можно опре- делить из дифференциальных уравнений:
dxdt = V cos θ + ux , dydt = V sin θ + uy ,
где V - скорость ЛА, θ - угол наклона траектории ЛА, ux , uy - составляющие
скорости ветра. Аналогичные уравнения можно записать для координат цели.
Угол наклона траектории,
характеризующий направление движения ЛА, формируется в процессе его углового движения, описываемого уравнениями равновесия сил и момен-
тов:
mV |
dθ |
= Psin α + N − G cosθ , |
J z |
d 2υ |
= Mz , |
|
dt |
dt 2 |
|||||
|
|
|
|
где m - масса ЛА, P - сила тяги двигателя (рис. 6), N - подъемная (нормальная) сила, G - сила веса ЛА, υ - угол тангажа, α = υ − θ − угол атаки, Jz - момент инерции ЛА,
6
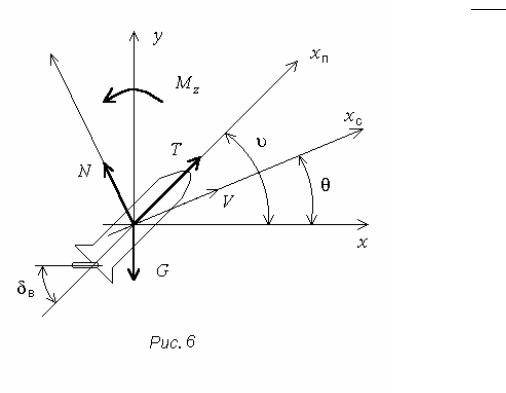
Mz = Mz æçèa,dв ,u. ö÷ø - вращающий момент, обеспечиваемый рулями высоты.
Повороты рулей высоты в первом приближении можно описать уравнением:
Tр• dδВ + dВ = kр•s, dt
где kрп , Tрп - постоянная
времени и коэффициент пере- дачи рулевого привода. Сигнал управления σ включает в себя две составляющие:
σ = σс н + σс т, сигнал стаби-
.
лизации: σс т = i1υ + i2 υ, i1,i2 - коэффициенты закона
стабилизации, сигнал самона- ведения σс н формируется в
зависимости от текущих зна-
чений координат ЛА и цели в соответствии с выбранным за- коном.
На основе рассматривае- мой впоследствии процедуры линеаризации и с учетом гипотезы о малых зна- чениях угловых координат модель рассматриваемой системы может быть полу- чена в виде следующей системы дифференциальных уравнений:
|
|
dθ |
|
= KJ - Kq, |
|
|
|
|
|
|
|
|
|
|
σ = σ |
с т |
+ σ |
|
, |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с н |
|
|
|||
|
dϑ |
= w |
z |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
σ |
с т |
= i ϑ + i ω |
z |
, |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|||||||
dωz |
= Lq - LJ - Mw |
z |
- Nd |
в |
, |
|
s |
с н |
= -k |
|
(q |
ц |
- q), |
||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||||||
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с н |
|
|
|
|
|
|
|||||||
|
|
|
|
|
kрп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yц − yла |
|
|
|
||||||||||
|
|
dd |
в |
= |
|
s - |
1 |
dв |
, |
|
|
|
|
|
|
qц = |
, |
|
|||||||||||||||||
|
|
|
|
|
|
Tрп |
Tрп |
|
|
|
|
|
|
|
|
|
D |
|
|
|
|||||||||||||||
|
|
dt |
|
|
|
|
dyц |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
dyла |
= Vq, |
|
= V |
|
, |
dD |
= V |
-V , |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
dt |
цy |
|
dt |
|
цx |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где ω z - скорость изменения угла тангажа ЛА, D - горизонтальная проекция
дальности "ЛА-цель", K,L,M,N - аэродинамические коэффициенты, kсн - коэф- фициент самонаведения (используется метод погони), θц - измеренный коор-
динатором угол наклона линии визирования цели.
7