

ством разрядов преобразователя l (например, для преобразователя задающего воздействия, рис. 32а):
gmax − gmin = δ1(2l − 1).
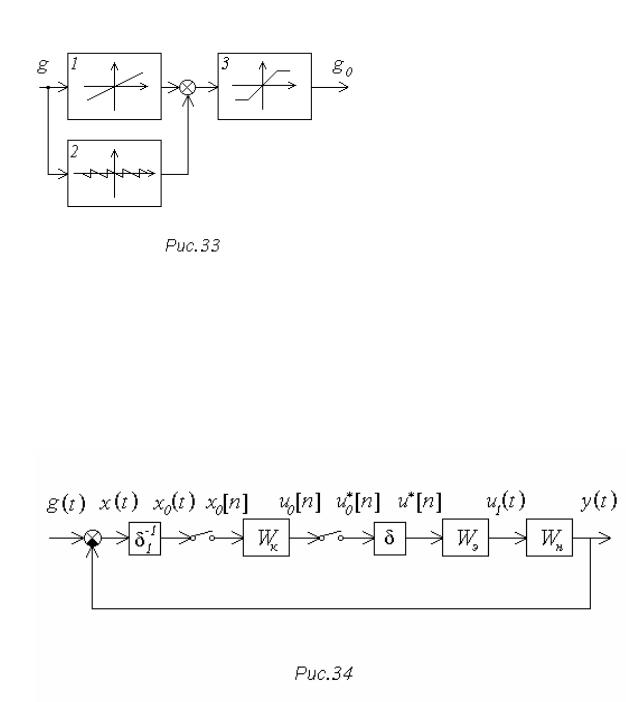
Линеаризация характеристики преобразователя рассмотренным выше ме- тодом означает, что показан- ные на рис. 33 звенья 2 и 3 исключаются из рассмотре- ния. Однако наличие в систе-
ме квантования по уровню оказывает влияние на точ- ность системы, а наличие ог- раничения (звено 3) может
влиять на характер процесса управления. Анализ такого влияния может быть выпол-
нен на основе структурной схемы, подобной рис. 33.
Лекция 13. Передаточные функции компьютерных систем управления
Рассмотрим одноканальную линеаризованную систему, структурная схе- ма которой показана на рис. 34.
Непрерывный сигнал ошибки поступает на линеаризованный АЦП и приобретает безразмерный цифровой вид x0(t). Ключ осуществляет дискрети- зацию по времени в соответствии с тактом работы управляющего компьютера.
поступает на вход компьютера и на ее ос- нове в соответствии с передаточной функцией компьютера Wк(z) формируется
50
цифровой решетчатый управляющий сигнал u0[n]. Ключ на выходе компьюте- ра отражает дискретность во времени формирования сигнала на выходе ком- пьютера. Далее линеаризованный ЦАП и экстраполятор с передаточной функ- цией Wэ(p) формируют непрерывный управляющий сигнал, который поступает на вход непрерывной части системы (объект управления) с передаточной
функцией Wн(p).
При определении передаточной функции непрерывной части она ее обычно рассматривают совместно с линеаризованными ЦАП и АЦП, а также с экстраполятором. При этом экстраполятор стараются строить таким образом, чтобы ослабить влияние эффекта дискретизации пор времени на работу систе- мы. Рассмотрим несколько примеров.
В экстраполяторе нулевого порядка сигнал на выходе удерживается постоянным в течение всего такта T0 (рис. 35).
Здесь x(t) - непрерывный сигнал на входе ключа, x[n] - решетчатая функция по- сле ключа, работающего с тактом Т0, x1(t) - выходной сигнал экстраполятора.
Передаточная функция экстраполятора может быть найдена как изображение по Ла- пласу его весовой функции, которая имеет
вид прямоугольного импульса 1(t)-1(t-T0).
|
|
Изображение по Лапласу прямоуголь- |
||||||
ного импульса длиной Т0 было получено ранее: |
|
|
|
|||||
F (p) = |
1 − e− pT0 |
= W |
э |
(p). |
||||
|
|
|||||||
и |
p |
|
|
|
|
|||
|
|
|
|
|
|
|
||
На основе подстановки e pT0 |
= z его можно представить в следующем |
|||||||
виде: |
1 − z −1 |
|
|
|
|
|
|
|
W э(p) = |
= |
z − 1 |
. |
|||||
p |
|
|||||||
|
|
|
zp |
|||||
Тогда передаточная функция приведенной непрерывной части системы (рис. 34) с учетом линеаризованных преобразователей и экстраполятора будет равна:
W п (p) = W э (p) δ W н (p) = z − 1 δ W н (p), |
|
δ1 |
zp δ1 |
а дискретная передаточная функция непрерывной части системы может быть найдена следующим образом:
51

W (z) = |
d |
|
z - 1 |
ìW |
н |
(p)ü |
|
||
|
Z í |
|
|
ý . |
(13.1) |
||||
d1 |
z |
|
p |
||||||
|
|
î |
|
þ |
|
||||
В экстраполяторе первого порядка сигнал на выходе в течение всего так- та изменяется по линейному закону (рис. 36а):
x1(t - nT0 ) = x[n]+ Ñx[n](t - nT0 ). T0
В результате в конце такта на выходе экстраполятора будет сигнал:
x1[n + 1] = x[n]+ Ñx[n] ¹ x[n + 1],
то есть здесь также есть погрешность восстановления непрерывного сигнала, хотя и меньшая, чем в экстраполяторе нулевого порядка.
Весовая функция экстраполятора первого порядка будет иметь вид, пока- занный на рис. 36б:
w(t) = 1(t) - 1(t - T0 ) + Tt0 1(t) - Tt0 1(t - T0 ).
Ее изображение по Лапласу даст передаточную функцию экстраполятора:
|
|
|
W э (p) = |
1 - e− pT0 |
|
+ (1 - e− pT0 )T0 |
t |
|
e− pt dt . |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
òT |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Найдем интеграл |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
ùT0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
T0 |
t |
e− pt dt = |
e− pt é |
t |
|
1 |
|
|
e− pT0 |
|
e− pT0 |
|
|
1 |
|
|
1 |
|
|
|
z - 1 |
||||||||
ò |
|
|
ê |
|
|
- |
|
|
ú |
= - |
|
- |
|
|
|
|
+ |
|
|
|
= - |
|
|
+ |
|
|
|
||
T0 |
|
- p |
p |
2 |
p |
T0 p |
2 |
|
T0 p |
2 |
zp |
T0zp |
2 |
||||||||||||||||
0 |
|
T0 ë |
|
|
û0 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
и подставим его значение в передаточную функцию, выполняя одновременно подстановку e pT0 = z :
52
W э (p) = |
z - 1 z - 1æ |
|
1 |
|
|
|
z - 1 |
ö |
|
æ z - 1ö |
2 æ |
1 |
|
|
1 |
ö |
|||||||||||||||
|
+ |
|
|
|
|
ç |
- |
|
+ |
|
|
|
|
÷ |
|
= ç |
|
|
|
|
ç |
|
|
|
+ |
|
÷ |
||||
|
|
|
|
|
|
|
|
|
|
|
|
÷ |
|
|
|
|
|||||||||||||||
zp |
|
|
z |
ç |
zp |
T0zp2 |
÷ |
|
|
ç |
|
p |
T0 p2 |
÷ . |
|||||||||||||||||
|
|
|
|
è |
|
|
|
ø |
|
è |
|
|
z ø |
è |
|
|
ø |
||||||||||||||
Теперь дискретная передаточная функция непрерывной части системы |
|||||||||||||||||||||||||||||||
может быть найдена следующим образом: |
|
|
(p) |
|
|
W (p) |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
d |
æ z - 1ö |
2 ìW |
|
|
|
|
ü |
|
|
|
||||||||||||||||
|
W (z) |
|
|
|
ï |
|
н |
|
|
|
|
|
н |
|
ï |
|
|
|
|
||||||||||||
|
= |
|
ç |
|
|
|
÷ |
|
|
Z í |
|
|
|
+ |
|
|
ý . |
|
(13.2) |
||||||||||||
|
d1 |
|
|
|
|
|
|
|
p |
|
|
T p2 |
|
||||||||||||||||||
|
|
|
|
|
è |
|
z ø |
|
ï |
|
|
|
|
|
|
ï |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
î |
|
|
|
|
|
|
|
0 |
|
|
þ |
|
|
|
||||
В рассмотренных выше дискретных экстраполяторах характерной осо-
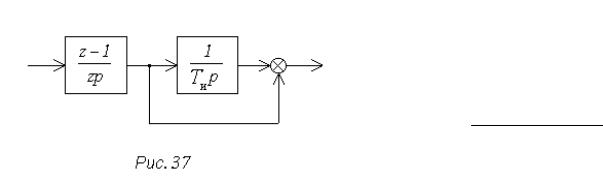
бенностью является сбрасывание накопленной внутри такта ошибки при начале очередного такта. При этом сигнал на выходе экстраполятора в начале очеред- ного такта всегда изменяется скачкообразно. Обеспечить непрерывный выход- ной сигнал позволяют экстраполяторы, построенные с использованием интег- рирующих устройств. Непрерывный экстраполятор первого порядка показан на
рис. 37. Он включает в себя после- довательно соединенные экстрапо- лятор нулевого порядка и изодром- ное звено. Передаточная функция такого экстраполятора будет равна:
W э (p) = (z - 1)(1 + Tи p).
Дискретная передаточная функция непрерывной части системы в этом случае должна определяться сле- дующим образом:
|
d z - 1 |
ì |
|
|
|
ü |
|
|||
W (z) = |
ï(1 |
+ Tи p)W н (p)ï |
|
|||||||
|
|
|
|
Z í |
|
|
|
ý . |
(13.3) |
|
d1 |
|
z |
|
|
T p2 |
|||||
|
|
ï |
|
|
ï |
|
||||
|
|
|
|
|
î |
|
|
и |
þ |
|
Передаточная функция управляющего |
компьютера |
рассматривается в |
||||||||
форме отношения z-изображений выходного и входного сигналов:
|
U(z) |
|
b0 |
+ |
b1z |
−1 + + |
|
−l |
|
|
|
W к (z) = |
|
= |
|
... blz |
|
. |
(13.4) |
||||
X (z) |
a |
+ a z −1 +...+a |
z−m |
||||||||
|
|
|
0 |
|
|
1 |
m |
|
|
|
|
Из (13.4) можно перейти к разностному уравнению
a0 u0 [n]+ a1u0 [n - 1]+...+am u0 [n - m] =
= b0 x0 [n]+ b1x0 [n − 1]+...+bl x0 [n − l],
которое всегда может быть приведено к виду с a0=1.
Далее выполняется переход к алгоритму формирования сигнала управле- ния u0[n]:
53