

13.9. Регулирование скорости гидропривода
При эксплуатации гидрофицированных машин, станков и механизмов возникает естественная необходимость в регулировании скорости выходного звена гидропривода. Известно, что эта скорость (угловая – вала гидромотора или линейная - штока гидроцилиндра) зависит от расхода подаваемой в гидродвигатель рабочей жидкости.
В зависимости от способа изменения этого расхода различают объемное и дроссельное регулирование. Тот и другой способы регулирования не зависят от кинематического признака гидропривода, но зависят от других факторов, в частности, от характера изменения нагрузки, выходной скорости гидродвигателя; определяются они и экономическими соображениями.
Рассмотрим объемный способ регулирования применительно к гидроприводу вращательного движения, а дроссельный – применительно к гидроприводу возвратно–поступательного движения.
13.9.1. Объемное регулирование
Расчетную частоту вращения вала гидромотора n2 определяют из условий равенства подачи насоса Q1 и расхода жидкости гидромотора Q2, т.е. Q1=Q2 или W1·n1=W2·n2, откуда
![]() ,
,
где W1, W2 – рабочие объемы соответственно насоса и гидромотора.
Частота вращения вала насоса n1 постоянна для гидроприводов с объемным регулированием, т.к. эта частота номинальна для приводящего двигателя, при которой к.п.д. двигателя будет максимальным.
Следовательно, регулирование частоты вращения гидромотора возможно тремя способами: изменением рабочего объема насоса (рис.13.10), гидромотора (рис. 13.11) или одновременно насоса и гидромотора (рис.13.12).
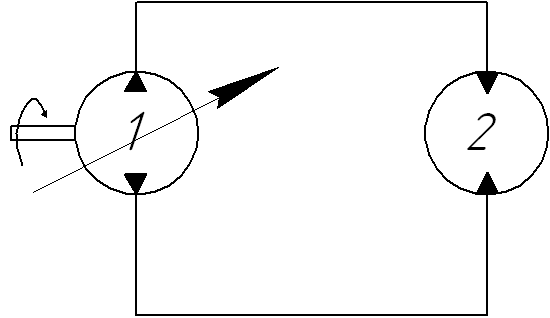
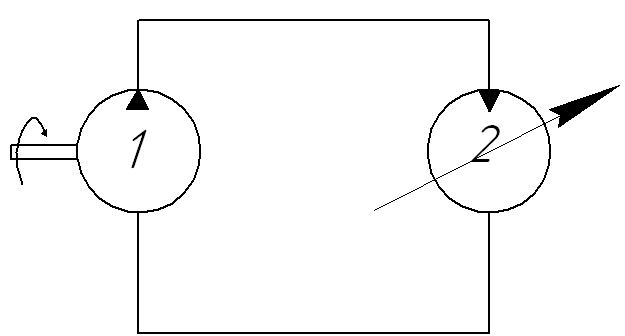
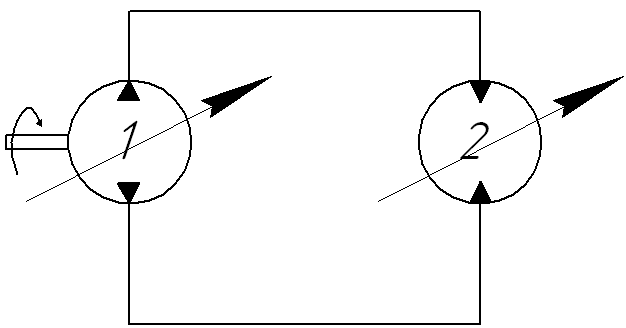
Рис.13.10 Рис.13.11 Рис.13.12
Первый способ применяют в гидроприводах поступательного, поворотного и вращательного движения, второй и третий – только в гидроприводах вращательного движения.
гидропривод с регулируемым насосом и нерегулируемым гидромотором является самым распространенным видом объемного регулирования (рис.13.10). Принцип работы гидропривода заключается в следующем. При включении приводящего двигателя насос 1 нагнетает рабочую жидкость по напорной линии в гидромотор 2, вал которого под действием крутящего момента вращается в определенном направлении. Из гидромотора 2 рабочая жидкость по сливной линии снова поступает в насос. Давление в гидросистеме р1 зависит от нагрузки гидромотора:
![]() ,
,
где М2 – крутящий момент гидромотора, Н·м; W2 – рабочий объем гидромотора, м3; ртр – потери давления в гидролиниях, Па.
Частоту вращения гидромотора регулируют, изменяя рабочий объем насоса, а направление вращения вала гидромотора изменяют благодаря реверсированию потока рабочей жидкости, создаваемого насосом. При этом сначала подачу насоса уменьшают до нуля, а затем увеличивают, но в противоположном направлении. В результате функции гидролиний меняются: сливная становится напорной, напорная – сливной.
На рис.13.13 показаны характеристики такого гидропривода с учетом следующих условий: n1=const; W2=const; p2=const. Основные параметры гидропривода определяют по следующим формулам:
![]()
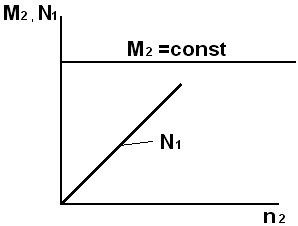
Рис. 13.13
гидропривод с регулируемым гидромотором и нерегулируемым насосом (рис.13.11) применяют значительно реже по сравнению с гидроприводами, которые имеют регулируемые насосы. На рис.13.14 показаны характеристики такого гидропривода с учетом следующих условий: n1=const; W1=const; р2= const. Основные параметры гидропривода определяют по формулам
![]()
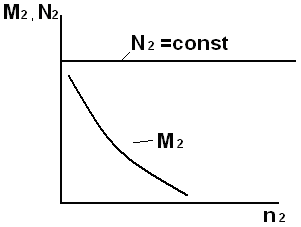
Рис. 13.14
Частота вращения гидромотора изменяется в рассматриваемом гидроприводе обратно пропорционально рабочему объему гидромотора. Например, чтобы увеличить частоту вращения гидромотора, необходимо уменьшить его рабочий объем (при этом уменьшается его крутящий момент). Теоретическая мощность привода (без учета потерь) в данном гидроприводе является постоянной. К недостаткам такого привода следует отнести сложность управления гидромоторами в случае их значительного удаления от операторов и ограничение минимального рабочего объема гидромотора, при котором момент, развиваемый гидромотором, становится равным или меньше момента внутреннего трения (самоторможение).
Гидропривод с регулируемым насосом и гидромотором. Для такого привода (рис.13.12) характерен больший диапазон регулирования частоты вращения и момента, развиваемого гидромотором. Обеспечение характеристики М2=f(n2), как показано на рис. 13.15, дает возможность использовать этот гидропривод в транспортных средствах, где необходимо осуществлять трогание машины с моментом Mmax при очень малой скорости (n2≈0). По мере разгона момент должен снижаться, а частота вращения увеличиваться. Это достигается уменьшением (регулированием) рабочего объема гидромотора. Применение регулируемого насоса увеличивает диапазон регулируемого привода, но из-за сложности двойного регулирования такой гидропривод пока не нашел широкого применения.
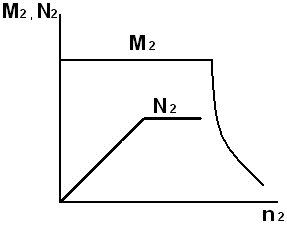
Рис.13.15.