

Работа9. Изучение прецессии гироскопа
Цель работы – экспериментально исследовать основные свойства гироскопа, изучить законы вращательного движения твердого тела.
Общие сведения
Гироскопом
называют массивное симметричное тело,
вращающееся с большой скоростью вокруг
оси симметрии. Основное свойство
гироскопа – способность сохранять
неизменным направление 
 оси
вращения при отсутствии действующего
на него момента внешних сил. Это свойство
гироскопа основано на законе сохранения
момента импульса. Гироскопы широко
применяются в технике: в качестве
стабилизаторов направления при движении
судов, самолетов (устройство автопилот)
и т.д.
оси
вращения при отсутствии действующего
на него момента внешних сил. Это свойство
гироскопа основано на законе сохранения
момента импульса. Гироскопы широко
применяются в технике: в качестве
стабилизаторов направления при движении
судов, самолетов (устройство автопилот)
и т.д.
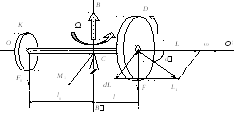
Рассмотрим
гироскоп, основным элементом которого
является диск D, вращающийся со
скоростью
![]() вокруг горизонтальной осиОО'(см. рисунок).
Ось гироскопа шарнирно закреплена в
точкеC.Прибор снабжен противовесомK. Если противовес установлен так,
что точкаCявляется центром масс
системы (m– масса гироскопа;m0– масса противовесаK;
масса стержня пренебрежимо мала), то
без учета трения можно записать:
вокруг горизонтальной осиОО'(см. рисунок).
Ось гироскопа шарнирно закреплена в
точкеC.Прибор снабжен противовесомK. Если противовес установлен так,
что точкаCявляется центром масс
системы (m– масса гироскопа;m0– масса противовесаK;
масса стержня пренебрежимо мала), то
без учета трения можно записать:
![]()
т.е.
результирующий момент сил, действующий
на систему, равен нулю. Тогда справедлив
закон сохранения момента импульса
![]() :
:
![]() .
.
Иными
словами, в этом случае
![]() const
(здесьJ– момент инерции гироскопа,
const
(здесьJ– момент инерции гироскопа,
![]() – собственная угловая скорость вращения
гироскопа).
– собственная угловая скорость вращения
гироскопа).
Поскольку
момент инерции диска относительно его
оси симметрии есть величина постоянная,
то вектор угловой скорости также остается
постоянным как по величине, так и по
направлению. Вектор
![]() направлен по оси вращения в соответствии
с правилом правого винта. Таким образом,
ось свободного гироскопа сохраняет
свое положение в пространстве неизменным.
направлен по оси вращения в соответствии
с правилом правого винта. Таким образом,
ось свободного гироскопа сохраняет
свое положение в пространстве неизменным.
Если
к противовесу Kдобавить еще один с
массойm1, то центр масс системы
сместится и возникнет вращающий момент
![]() направленный перпендикулярно осиОО'в горизонтальной плоскости. Согласно
уравнению моментов,
направленный перпендикулярно осиОО'в горизонтальной плоскости. Согласно
уравнению моментов,
![]() .
Под действием этого вращающего момента
вектор момента импульса получит
приращение
.
Под действием этого вращающего момента
вектор момента импульса получит
приращение
![]() ,
совпадающее по направлению с вектором
,
совпадающее по направлению с вектором
![]() :
:
![]() .
(1)
.
(1)
Спустя
время
![]() момент импульса гироскопа изменится
на величину
момент импульса гироскопа изменится
на величину
![]() :
:
![]() .
.
Таким
образом, вектор![]() изменяет свое направление в пространстве,
все время оставаясь в горизонтальной
плоскости. Учитывая, что вектор момента
импульса гироскопа направлен вдоль оси
вращения, поворот вектора
изменяет свое направление в пространстве,
все время оставаясь в горизонтальной
плоскости. Учитывая, что вектор момента
импульса гироскопа направлен вдоль оси
вращения, поворот вектора
![]() на некоторый уголdза времяdtозначает поворот оси
вращения на тот же угол. В результате
ось симметрии гироскопа начнет вращаться
вокруг неподвижной вертикальной осиВВ'с угловой скоростью:
на некоторый уголdза времяdtозначает поворот оси
вращения на тот же угол. В результате
ось симметрии гироскопа начнет вращаться
вокруг неподвижной вертикальной осиВВ'с угловой скоростью:
![]() .
.
Такое
движение называется регулярной
прецессией, а величина
![]() – угловой скоростью прецессии.
– угловой скоростью прецессии.
Выясним зависимость угловой скорости прецессии гироскопа от основных параметров системы. Из формул (1) получим
![]()
При
малых углах поворота из геометрических
соображений (см. рисунок)
![]() ,
тогда
,
тогда
![]() ,
и угловая скорость прецессии
,
и угловая скорость прецессии
![]() .
(2)
.
(2)
Подвижный элемент гироскопа представляет собой массивный маховик (диск), закрепленный на оси электродвигателя. Вдоль оси маховика закреплена планка с линейной метрической шкалой. Вдоль планки может перемещаться противовес.
Угол поворота оси двигателя в горизонтальной плоскости и время движения измеряются электронной схемой с фотоэлектрическим датчиком. Кроме того, угол поворота гироскопа можно считывать по нанесенной на основании подвижной части угловой шкале. По окружности основания через каждые 5нанесены отверстия, которые служат для считывания угла поворота при помощи фотоэлектрического датчика. На лицевой панели блока управления расположены индикаторные табло угла и времени поворота, а также кнопки «СЕТЬ», «СБРОС», «СТОП», и рукоятка регулятора скорости вращения «РЕГ. СКОРОСТИ».