

Ersoy O.K. Diffraction, Fourier optics, and imaging (Wiley, 2006)(ISBN 0471238163)(427s) PEo
.pdf8 |
LINEAR SYSTEMS AND TRANSFORMS |
where a1 and a2 are scalars. Above ðx; yÞ is replaced by ½m; n& in the case of a linear discrete-space system.
Suppose that the input at ðx1; y1Þ is the delta function d(x1, y1) (see Appendix A for a discussion of the delta function). The output at location ðx; yÞ is defined as
hðx; y; x1; y1Þ ¼ O½dðx x1; y y1Þ& |
ð2:2-4Þ |
hðx2; y2; x1; y1Þ is called the impulse response (point-spread function) of the system. The sifting property of the delta function allows an arbitrary input uðx; yÞ to be
expressed as
|
1 |
|
uðx; yÞ ¼ |
ð ð uðx1; y1Þdðx x1; y y1Þdx1dy1 |
ð2:2-5Þ |
|
1 |
|
Now the output can be written as
gðx; yÞ ¼ O½uðx; yÞ&
ð1 ð
¼uðx1; y1ÞO½dðx x1; y y1Þ&dx1dy1
1 ð2:2-6Þ
1ð
¼uðx1; y1Þhðx; y; x1; y1Þdx1dy1
1
This result is known as the superposition integral. Physically, the delta function corresponds to a point source. The superposition integral implies that all we need to know is the response of the system to point sources throughout the field of interest in order to characterize the system.
A linear imaging system is called space invariant or shift invariant if a translation of the input causes the same translation of the output. For a point source at the origin, the output of a shift-invariant system can be written as
hðx; y; 0; 0Þ ¼ O½dðx; yÞ& |
ð2:2-7Þ |
If the input is shifted as dð x1; y1Þ, the output of the shift-invariant system must be hðx x1; y y1; 0; 0Þ. This is usually written simply as
hðx; y; x1; y1Þ ¼ hðx x1; y y1Þ |
ð2:2-8Þ |
|
Then, the superposition integral becomes |
|
|
|
1 |
|
gðx; yÞ ¼ |
ð ð uðx1; y1Þhðx x1; y y1Þdx1dy1 |
ð2:2-9Þ |
|
1 |
|
LINEAR SYSTEMS AND SHIFT INVARIANCE |
9 |
By a change of variables, this can also be written as
|
1 |
ð hðx1; y1Þ f ðx x1; y y1Þdx1dy1 |
|
gðx; yÞ ¼ |
ð |
ð2:2-10Þ |
|
|
1 |
|
|
This is the same as the 2-D convolution of hðx; yÞ with uðx; yÞ to yield gðx; yÞ. It is often written symbolically as
gðx; yÞ ¼ hðx; yÞ uðx; yÞ |
ð2:2-11Þ |
The significance of this result is that a linear shift-invariant (LSI) system is governed by convolution. Hence, the convolution theorem can be used to express the input–output relationship as
Gðfx; fyÞ ¼ Hð fx; fyÞUð fx; fyÞ |
ð2:2-12Þ |
where Gð fx; fyÞ, Hð fx; fyÞ, and Uð fx; fyÞ are the Fourier transforms of gðx; yÞ; hðx; yÞ and uðx; yÞ, respectively. The Fourier transform is discussed in the next section. Hð fx; fyÞ given by
|
1 |
ð hðx; yÞe j 2pð fxxþfyyÞdxdy; |
|
Hð fx; fyÞ ¼ |
ð |
ð2:2-13Þ |
|
|
1 |
|
|
is called the transfer function of the system.
In the case of a discrete-space system, the superposition integral becomes the superposition sum, given by
1 |
1 |
|
X |
X |
ð2:2-14Þ |
g½m; n& ¼ |
u½m1; n1&h½m; n; m1; n1& |
m1¼ 1 n1¼ 1
In the case of a discrete-space LSI system, the convolution integral becomes the convolution sum, given by
1 |
1 |
|
X |
X |
ð2:2-15Þ |
g½m; n& ¼ |
u½m1; n1&h½m m1; n n1&; |
m1¼ 1 n1¼ 1
which can also be written as
1 |
1 |
|
X |
X |
ð2:2-16Þ |
g½m; n& ¼ |
h½m1; n1&u½m m1; n n1& |
m1¼ 1 m2¼ 1
10 |
LINEAR SYSTEMS AND TRANSFORMS |
The transfer function of a discrete-space LSI system is the discrete-space Fourier transform of the impulse response, given by
X |
X |
|
1 |
1 |
ð2:2-17Þ |
Hð fx; fyÞ ¼ |
h½m1; n1&e j 2pð fxm1 xþf2n1 yÞ |
m1¼ 1 n1¼ 1
The convolution theorem is stated by Eq. (2.2-12) in this case as well.
2.3CONTINUOUS-SPACE FOURIER TRANSFORM
The property of linearity allows the decomposition of a complex signal into elementary signals often called basis signals. In Fourier analysis, basis signals or functions are sinusoids.
The 1-D Fourier transform of a signal uðtÞ, 1 t 1 is defined as
|
1 |
|
|
Ucðf Þ ¼ |
ð |
uðtÞe j 2p ftdf |
ð2:3-1Þ |
|
1 |
|
|
The inverse Fourier transform is the representation of uðtÞ in terms of the basis functions e j2pft and is given by
|
1 |
|
|
uðtÞ ¼ |
ð |
Ucð f Þe j2p ftdf |
ð2:3-2Þ |
|
1 |
|
|
Equation (2.3-1)is also referred to as the analysis equation. Equation (2.3-2) is the corresponding synthesis equation.
The multidimensional (MD) Fourier transform belongs to the set of separable unitary transforms as the transformation kernel is separable along each direction. For example, the 2-D transform kernel bðx; y; fx; fyÞ can be written as
bðx; y; fx; fyÞ ¼ b1ðx; fxÞb2ðy; fyÞ |
ð2:3-3Þ |
bið ; Þ for i equal to 1 or 2 is the 1-D transform kernel.
The 2-D Fourier transform of a signal uðx; yÞ, 1 < x; y < 1 is defined as
|
1 |
|
Uðfx; fyÞ ¼ |
ð ð uðx; yÞe j2pðxfxþyfyÞdxdy; |
ð2:3-4Þ |
|
1 |
|
where fx and fy are the spatial frequencies corresponding to the x- and y-directions, respectively.

EXISTENCE OF FOURIER TRANSFORM |
11 |
The inverse transform is given by
|
1 |
ð Uð fx; fyÞe j2pðxfxþyfyÞdfxdfy |
|
uðx; yÞ ¼ |
ð |
ð2:3-5Þ |
|
|
1 |
|
|
2.4EXISTENCE OF FOURIER TRANSFORM
Sufficient conditions for the existence of the Fourier transform are summarized below:
A.The signal must be absolutely integrable over the infinite space.
B.The signal must have only a finite number of discontinuities and a finite number of maxima and minima in any finite subspace.
C.The signal must have no infinite discontinuities.
Any of these conditions can be weakened if necessary. For example, a 2-D strong, narrow pulse is often represented by a 2-D impulse (Dirac delta) function, defined by
dð |
x; y |
Þ ¼ |
lim N2e N2pðx2þy2Þ |
ð |
2:4-1 |
Þ |
|
|
N |
!1 |
|
||||
|
|
|
|
|
|
|
|
This function fails to satisfy condition C. Two other functions that fail to satisfy condition A are
uðx; yÞ ¼ 1
ð2:4-2Þ
uðx; yÞ ¼ cos 2pfxx
With such functions, the Fourier transform is still defined by incorporating generalized functions such as the delta function above and defining the Fourier transform in the limit. The resulting transform is often called the generalized Fourier transform.
EXAMPLE 2.1 Find the FT of the 2-D delta function, using its definition.
Solution: Let
uðx; yÞ ¼ N2e N2pðx2þy2Þ
Then,
dðx; yÞ ¼ lim f ðx; yÞ
N!1

12 |
LINEAR SYSTEMS AND TRANSFORMS |
Now, we can write
Uðfx; fyÞ ¼ e pð fx2þfy2Þ=N2
Denoting ðfx; fyÞ as the Fourier transform of dðx; yÞ in the limit as N ! 1, we find
ðfx; fyÞ ¼ lim Uð fx; fyÞ ¼ 1
N!1
2.5PROPERTIES OF THE FOURIER TRANSFORM
The properties of the 2-D Fourier transform are generalizations of the 1-D Fourier transform. We will need the definitions of even and odd signals in 2-D. A signal uðx; yÞ is even (symmetric) if
uðx; yÞ ¼ uð x; yÞ |
(2.5-1) |
uðx; yÞ is odd (antisymmetric) if
uðx; yÞ ¼ uð x; yÞ |
(2.5-2) |
These definitions really indicate two-fold symmetry. It is possible to extend them to four-fold symmetry in 2-D.
Below we list the properties of the Fourier transform.
Property 1: Linearity
If gðx; yÞ ¼ au1ðx; yÞ þ bu2ðx; yÞ, then |
|
Gð fx; fyÞ ¼ aU1ð fx; fyÞ þ bU2ð fx; fyÞ |
ð2:5-3Þ |
Property 2: Convolution |
|
If gðx; yÞ ¼ u1ðx; yÞ u2ðx; yÞ, then |
|
Gð fx; fyÞ ¼ U1ð fx; fyÞU2ð fx; fyÞ |
ð2:5-4Þ |
Property 3: Correlation is similar to convolution, and the correlation between u1ðx; yÞ and u2ðx; yÞ is given by
gðx; yÞ ¼ ðð u1ðx1; y1Þu2ðx þ x1; y þ y1Þdx1dy1 |
ð2:5-5Þ |
1 |
|
1 |
|
If gðx; yÞ ¼ u1ðx; yÞ u2ðx; yÞ, where denotes 2-D correlation, then |
|
Uð fx; fyÞ ¼ U1ð fx; fyÞU2 ð fx; fyÞ |
ð2:5-6Þ |
PROPERTIES OF THE FOURIER TRANSFORM |
13 |
|||||
Property 4: Modulation |
|
|
|
|
|
|
If gðx; yÞ ¼ u1ðx; yÞu2ðx; yÞ, then |
|
|
|
|
|
|
Gð fx; fyÞ ¼ F1ð fx; fyÞ F2ð fx; fyÞ |
ð2:5-7Þ |
|||||
Property 5: Separable function |
|
|
|
|
|
|
If gðx; yÞ ¼ u1ðxÞu2ðyÞ, then |
|
|
|
|
|
|
Gð fx; fyÞ ¼ U1ð fxÞU2ð fyÞ |
ð2:5-8Þ |
|||||
Property 6: Space shift |
|
|
|
|
|
|
If gðx; yÞ ¼ uðx x0; y y0Þ, then |
|
|
|
|
|
|
Gð fx; fyÞ ¼ e j2pð fxx0þfyy0Þ Uð fx; fyÞ |
ð2:5-9Þ |
|||||
Property 7: Frequency shift |
|
|
|
|
|
|
If gðx; yÞ ¼ e j2pð fx0xþfy0yÞ uðx; yÞ, then |
|
|||||
Gð fx; fyÞ ¼ Uð fx fx 0; f2 fy 0Þ |
ð2:5-10Þ |
|||||
Property 8: Differentiation in space domain |
|
|||||
If gðx; yÞ ¼ @k=@xk @‘=@y‘ uðx; yÞ, then |
|
|||||
Gð fx; fyÞ ¼ ð2p jfxÞkð2p jfyÞ‘Uð fx; fyÞ |
ð2:5-11Þ |
|||||
Property 9: Differentiation in frequency domain |
|
|||||
If gðx; yÞ ¼ ð j2pxÞkð j2pyÞ‘uðx; yÞ, then |
|
|||||
|
|
@k @‘ |
|
|||
Gð fx; fyÞ ¼ |
|
|
|
Uð fx; fyÞ |
ð2:5-12Þ |
|
@fxk |
@fy‘ |
|||||
Property 10: Parseval’s theorem |
|
|
|
|
|
|
1 |
1 |
ð Uð fx; fyÞG ð fx; fyÞdfxdfy |
|
|||
ð ð uðx; yÞg ðx; yÞdxdy ¼ |
ð |
ð2:5-13Þ |
||||
1 |
1 |
|
|
|
|
|
Property 11: Real uðx; yÞ |
|
|
|
|
|
|
Uð fx; fyÞ ¼ U ð fx; fyÞ |
ð2:5-14Þ |
|||||
Property 12: Real and even uðx; yÞ
Uð fx; fyÞ is real and even

14 |
|
|
|
|
|
|
LINEAR SYSTEMS AND TRANSFORMS |
||
Property 13: Real and odd uðx; yÞ |
|
|
|
|
|
||||
|
|
|
Uð fx; fyÞ is imaginary and odd |
|
|||||
Property 14: Laplacian in the space domain |
|
||||||||
@2 |
|
@2 |
|
|
|
|
|
|
|
If gðx; yÞ ¼ |
|
þ |
|
uðx; yÞ, then |
|
|
|
||
@x2 |
@y2 |
|
|
|
|||||
|
|
|
Gð fx; fyÞ ¼ 4p2ð fx2 þ fy2ÞUð fx; fyÞ |
ð2:5-15Þ |
|||||
Property 15: Laplacian in the frequency domain |
|
||||||||
If gðx; yÞ ¼ 4p2ðx2 þ y2Þuðx; yÞ, then |
|
|
|
||||||
|
|
|
Gð fx; fyÞ ¼ |
@2 |
þ |
@2 |
!Uð fx; fyÞ |
ð2:5-16Þ |
|
|
|
|
@fx2 |
@fy2 |
|||||
Property 16: Square of signal |
|
|
|
|
|
||||
If gðx; yÞ ¼ juðx; yÞj2, then |
|
|
|
|
|
||||
|
|
|
Gð fx; fyÞ ¼ Uð fx; fyÞ U ð fx; fyÞ |
ð2:5-17Þ |
|||||
Property 17: Square of spectrum |
|
|
|
|
|
||||
If gðx; yÞ ¼ uðx; yÞ u ðx; yÞ, then |
|
|
|
|
|
||||
|
|
|
|
Gð fx; fyÞ ¼ jUð fx; fyÞj2 |
ð2:5-18Þ |
||||
Property 18: Rotation of axes |
|
|
|
|
|
||||
If gðx; yÞ ¼ uð x; yÞ, then |
|
|
|
|
|
||||
|
|
|
|
Gð fx; fyÞ ¼ Uð fx; fyÞ |
ð2:5-19Þ |
||||
The important properties of the FT are summarized in Table 2-1.
EXAMPLE 2.2 Find the 1-D FT of
1ð
gðxÞ ¼ |
uðx; yÞdy |
1
as a function of the FT of uðx; yÞ.
PROPERTIES OF THE FOURIER TRANSFORM |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15 |
||||||||||
Table 2.1. Properties of the Fourier transform (a, b, |
fx0 |
and fy0 |
are real nonzero |
||||||||||||||||||||||||
constants; k and l are nonnegative integers). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Property |
|
|
gðx; yÞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
Gðfx; fyÞ |
|
|||||||||
Linearity |
au1ðx; yÞ þ bu2ðx; yÞ |
|
aU1ð fx; fyÞ þ bU2ð fx; fyÞ |
||||||||||||||||||||||||
Convolution |
u1ðx; yÞ u2ðx; yÞ |
|
|
U1ð fx; fyÞU2ð fx; fyÞ |
|||||||||||||||||||||||
Correlation |
u1ðx; yÞ u2ðx; yÞ |
|
|
U1ð fx; fyÞU2 ð fx; fyÞ |
|||||||||||||||||||||||
Modulation |
|
u1ðx; yÞu2ðx; yÞ |
|
|
U1ð fx; fyÞ U2ð fx; fyÞ |
||||||||||||||||||||||
Separable function |
|
|
u1ðxÞu2ðyÞ |
|
|
|
|
|
|
U1ð fxÞU2ð fyÞ |
|
||||||||||||||||
Space shift |
uðx |
|
x0; y y0Þ |
|
e |
j2pð fxx0þfy y0 Þ Uð fx; fyÞ |
|||||||||||||||||||||
Frequency shift |
gðx; yÞ ¼ e j2pð fx0xþfy0yÞ uðx; yÞ |
Gð fx; fyÞ ¼ Uð fx |
fx0; f2 |
fy0Þ |
|||||||||||||||||||||||
|
|
|
@k |
|
@‘ |
|
|
|
ð2pjfxÞkð2pjfyÞ‘Uð fx; fyÞ |
||||||||||||||||||
Differentiation in |
|
|
|
|
|
|
|
uðx; yÞ |
|
||||||||||||||||||
|
|
@xk |
@y‘ |
|
|||||||||||||||||||||||
space domain |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
@k |
|
|
@‘ |
|
|
|
|
||||
|
ð j2pxÞkð j2pyÞ‘uðx; yÞ |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Differentiation in |
|
|
|
|
|
|
|
|
|
Uð fx; fyÞ |
|
||||||||||||||||
|
|
|
|
@f k |
@f ‘ |
|
|||||||||||||||||||||
frequency domain |
|
@2 |
|
|
@2 |
|
|
|
|
|
|
|
|
x |
y |
|
|
|
|
||||||||
Laplacian in the space |
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
2 |
|
|
|
|||||||||
@x2 þ @y2 |
uðx; yÞ |
|
|
4p ð fx |
þ fy ÞUð fx; fyÞ |
||||||||||||||||||||||
domain |
|
|
|||||||||||||||||||||||||
Laplacian in |
4p2ðx2 þ y2Þuðx; yÞ |
|
|
@2 |
þ |
@2 |
!Uð fx; fyÞ |
||||||||||||||||||||
|
|
|
@fx2 |
@fy2 |
|||||||||||||||||||||||
the frequency domain |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Square of signal |
|
|
|
j |
ð |
|
Þj |
2 |
|
|
U |
ð |
fx |
; fy |
Þ |
U |
ð |
fx; fy |
Þ |
||||||||
|
|
|
|
u x; y |
|
|
|
|
|
|
|
|
|
||||||||||||||
Square of spectrum |
|
uðx; yÞ u ðx; yÞ |
|
|
|
|
|
|
|
jUð fx; fyÞj2 |
|
||||||||||||||||
Rotation of axes |
1 |
uð x; yÞ |
1 |
|
|
|
|
|
Uð fx; fyÞ |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
ð Uð fx; fyÞG ð fx; fyÞdfxdfy |
||||||||||||||||||
Parseval’s theorem |
ð ð uðx; yÞg ðx; yÞdxdy ¼ |
ð |
|||||||||||||||||||||||||
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Real uðx; yÞ |
|
|
|
|
|
|
|
|
|
Uð fx; fyÞ ¼ U ð fx; |
|
|
fyÞ |
|
|
|
|
|
|
|
|
|
|||||
Real and even uðx; yÞ |
|
|
|
|
|
|
|
|
|
Uð fx; fyÞis real and even |
|
|
|
|
|
|
|
|
|
||||||||
Real and odd uðx; yÞ |
|
|
|
|
|
|
|
|
Uð fx; fyÞis imaginary and odd |
|
|
|
|
|
|
||||||||||||
Solution: gðxÞ and dðxÞ are considered as 2-D functions gðxÞ 1 and dðxÞ 1, respectively. Then, gðxÞ can be written as
gðxÞ 1 ¼ uðx; yÞ ½dðxÞ 1& |
xÞdx1dy1 |
||
¼ |
ðð |
uðx1; y1Þdðx1 |
|
|
1 |
|
|
|
1 |
|
|
|
1 |
|
|
¼ |
ð |
uðx; yÞdy |
ð2:5-20Þ |
1

16 |
LINEAR SYSTEMS AND TRANSFORMS |
Computing the FT of both sides of Eq. (2.5-20) and using the convolution theorem and property 5 of separable functions gives
Gð fxÞdð fyÞ ¼ Uð fx; fyÞdð fyÞ
or
Gð fxÞ ¼ Uð fx; 0Þ
EXAMPLE 2.3 Find the FT of
gðx; yÞ ¼ uða1x þ b1y þ c1; a2x þ b2y þ c2Þ
as a function of the Fourier transform of uðx; yÞ.
Solution: |
|
ðð uða1x þ b1y þ c1; a2x þ b2y þ c2Þe j2pð f1xþf2yÞdxdy |
|
|||||||||
Gð fx; fyÞ ¼ |
|
|||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
Letting x1 ¼ a1x þ b1y þ c1 gives |
|
1 |
þ b2y þ c2 e j2p fx |
a1 þfyy |
ja11j |
|||||||
Gð fx; fyÞ ¼ |
ðð u x1; a2 x1 |
a11 |
|
|||||||||
|
1 |
|
|
b y |
c |
|
|
|
|
x1 a1y c1 |
|
dx dy |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
1 ¼ |
a |
2 |
|
a1 |
|
þ |
b |
2 |
y |
þ |
c |
2 |
gives |
|
Also letting y |
|
x1 b1y c1 |
|
|
|
|
|
|||||||
Gðfx; fyÞ ¼ jDj |
ðð |
uðx1; y1Þe j2p½x1fx0 þy1fy0 þT1fxþT2fy&dx1dy1 |
ð2:5-21Þ |
|||||||||||
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
1
where
D ¼ a2b1 a1b2
fx0 ¼ D1 ð a1fx þ a2fyÞ
fy0 ¼ 1 ðb1fx a1fyÞ D
T1 ¼ b1c2 b2c1
D
T2 ¼ a2c1 a1c2
D
PROPERTIES OF THE FOURIER TRANSFORM |
17 |
Equation (2.5-21) is the same as
Gðfx; fyÞ ¼ j1j e j2pðT1 fxþT2 fyÞUð fx0; fy0Þ
D
In other words, when the input signal is scaled, shifted, and skewed, its transform is also scaled, skewed, and linearly phase-shifted, but not shifted in position.
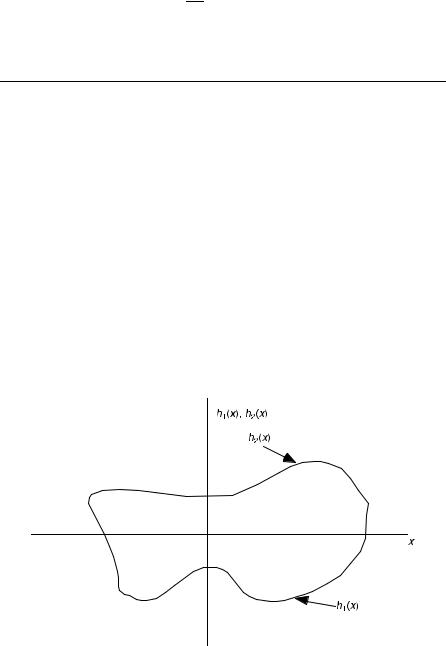
EXAMPLE 2.4 Find the FT of the ‘‘one-zero’’ function defined by
u x; y |
Þ ¼ |
1 |
h1ðxÞ < y < h2 |
x |
Þ |
; |
ð |
0 |
otherwise |
ð |
|
where h1ðxÞ and h2ðxÞ are given single-valued functions of x. Determine Uðfx; fyÞ and Uðfx; 0Þ.
Solution: uðx; yÞ is as shown in Figure 2.2. Its FT is given by
ðð1
Uðfx; fyÞ ¼ uðx; yÞe j 2pð fxxþfyyÞdxdy
1
1ð h2ðxÞ
¼ |
e j 2p fx xdx |
e j 2p fy ydy |
|
|
1 h1ðxÞ
Figure 2.2. A typical zero-one function.