

1.10.3. Кинетическая энергия
Энергию, которой обладают движущиеся тела, называют кинетической энергией Wk.
Пусть
частица массы m
движется под действием некоторой силы
 (в общем случае
сила
(в общем случае
сила может быть
результирующей всех сил – как
консервативных, так и неконсервативных).
Найдем элементарную работу, которую
совершает эта сила на элементарном
перемещении
может быть
результирующей всех сил – как
консервативных, так и неконсервативных).
Найдем элементарную работу, которую
совершает эта сила на элементарном
перемещении . Имея в виду,
что
. Имея в виду,
что и
и , запишем
величину элементарной работы как
, запишем
величину элементарной работы как
 .
.
Отсюда
видно, что работа результирующей силы
 идет на
приращение некоторой величины (стоящей
в скобках), которую и называют кинетической
энергией:
идет на
приращение некоторой величины (стоящей
в скобках), которую и называют кинетической
энергией:
 .
.
Приращение
кинетической энергии на элементарном
перемещении
 равно элементарной
работе,
равно элементарной
работе, . При конечном
перемещении из точки 1 в точку 2
. При конечном
перемещении из точки 1 в точку 2
 .
.
Изменение кинетической энергии материальной точки равно алгебраической сумме работ всех сил (как консервативных, так и неконсервативных), действующих на эту точку.
Потенциальная энергия
То
обстоятельство, что работа консервативных
сил зависит только от начального и
конечного положений материальной точки
в силовом поле, дает возможность ввести
понятие потенциальной
энергии этой
точки. Потенциальная энергия – это
энергия взаимодействия тел. Силы поля,
перемещая материальную точку, совершают
работу, которая равна уменьшению
потенциальной энергии:
 , или
, или ,
,
 (1.7)
(1.7)
а при конечном перемещении из точки 1 в точку 2:
 .
.
Потенциальная энергия может зависеть от координат различным образом в зависимости от вида силового взаимодействия. Чтобы записать формулу потенциальной энергии для данного вида взаимодействия, необходимо найти такую функцию координат точек пространства, чтобы разность значений этой функции была бы равна работе.
Интегрируя выражение (1.7), получим:


Неопределенный интеграл можно вычислить с точностью до постоянной интегрирования С. Эта постоянная определяется выбором точки силового поля, в которой потенциальная энергия условно принимается равной нулю.
Потенциальная энергия тела в гравитационном поле Земли

Рассмотрим
потенциальную энергию тела, поднятого
над поверхностью Земли на относительно
небольшую высоту h
<<
R,
где R
– радиус
Земли. Тогда гравитационное поле Земли
можно считать однородным. Сила тяжести
 , перемещая
тело из 1‑го состояния во 2‑е,
совершает работуА,
равную произведению модулей силы и
перемещения. Перемещение равно разности
координат у1
и
у2
(см. рис. 1.28). В свою очередь эта работа
равна уменьшению потенциальной энергии:
, перемещая
тело из 1‑го состояния во 2‑е,
совершает работуА,
равную произведению модулей силы и
перемещения. Перемещение равно разности
координат у1
и
у2
(см. рис. 1.28). В свою очередь эта работа
равна уменьшению потенциальной энергии:
Рис. 1.28.
 .
.
Раскрыв скобки, запишем:
 .
Из этого равенства следует, что зависимость
потенциальной энергии от координаты y
имеет
вид:
.
Из этого равенства следует, что зависимость
потенциальной энергии от координаты y
имеет
вид:
 .
.
Постоянная
С
не влияет на разность значений
потенциальной функции Wп
в 1‑ом и 2‑ом состояниях. Она
определяется выбором точки, в которой
потенциальная энергия условно принимается
равной нулю, допустим в точке с координатой
 . Тогда
. Тогда и
и
 .
Потенциальная энергия тела в однородном
гравитационном поле Земли
.
Потенциальная энергия тела в однородном
гравитационном поле Земли
 .
.
Для
тела, находящегося выше уровня
 , потенциальная
энергия положительна:
, потенциальная
энергия положительна:
 ,
где
,
где
 – высота
подъема тела над уровнем
– высота
подъема тела над уровнем
 . Для тела,
находящегося ниже уровня
. Для тела,
находящегося ниже уровня , потенциальная
энергия отрицательна:
, потенциальная
энергия отрицательна: ,
где
,
где ,h
– глубина
опускания тела под уровень
,h
– глубина
опускания тела под уровень
 . В большинстве
физических задач уровеньу0
выбирают на поверхности Земли.
. В большинстве
физических задач уровеньу0
выбирают на поверхности Земли.
Теперь примем во внимание неоднородность гравитационного поля Земли. По определению потенциальной энергии
 .
.
Учитывая,
что
 , получим
, получим .
.
Для
гравитационного поля Земли:
 . Проекция силы
. Проекция силы на радиус-вектор
на радиус-вектор :
: , тогда
, тогда

В
бесконечно удаленной точке ( )
значение потенциальной энергии примем
равным нулю. Исходя из этого, определим
постоянную интегрированияС:
)
значение потенциальной энергии примем
равным нулю. Исходя из этого, определим
постоянную интегрированияС:
 , т. е.С = 0.
Тогда потенциальная энергия тела в
неоднородном гравитационном поле Земли
, т. е.С = 0.
Тогда потенциальная энергия тела в
неоднородном гравитационном поле Земли
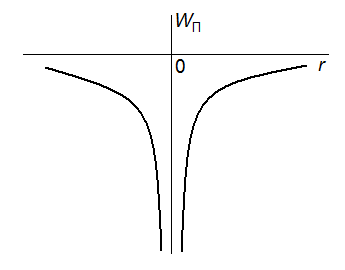
Рис. 1.29.
 .
(1.8)
.
(1.8)
Обратим внимание на то, что, если потенциальную энергию тела на бесконечном расстоянии от Земли принять равной нулю, то во всех других точках поля она отрицательна, и возрастает по мере удаления тела от Земли. Модуль потенциальной энергии с ростом расстояния r убывает (рис. 1.29). Отрицательный знак потенциальной энергии указывает на то, что в гравитационном поле Земли покоящееся тело находится в связанном состоянии, и для того, чтобы перенести его на бесконечность, где сила притяжения равна нулю, внешние силы должны совершить работу против гравитационной силы.
Покажем,
что формула (1.8) не противоречит выражению
для потенциальной энергии тела в
однородном гравитационном поле Земли:
 . Найдем по
формуле (1.8) потенциальную энергию тела,
поднятого над поверхностью Земли на
относительно небольшую высотуh<<R
(рис. 1.30):
. Найдем по
формуле (1.8) потенциальную энергию тела,
поднятого над поверхностью Земли на
относительно небольшую высотуh<<R
(рис. 1.30):
 , на поверхности
Земли
, на поверхности
Земли .
.

Тогда
Рис. 1.30.

или
 .
.
Вынесем в знаменателе R за скобки и получим:
 .
.
Учитывая,
что
 – ускорение
свободного падения и
– ускорение
свободного падения и
 , запишем
, запишем
 .
.