

1.1.3. Системы координат робота
Для обеспечения легкости программирования манипулятор имеет две системы координат, в отношении которых он движется: основную систему координат и систему координат инструмента.
Основная система координат (WORLD): состоит из трех перпендикулярных друг к друг осей (X, Y и Z), пересекающихся в плече манипулятора (рис. 8). Основная система координат не движется при перемещении звеньев манипулятора. Она используется, например, при обучении робота новым точкам.
В ручном режиме WORLD нажимая кнопок «X», «Y» и «Z» пульта ручного управления пользователь может перемещать инструмент прямолинейно по осям. Обучение легко производится, поскольку отдельные степени подвижности не требуют индивидуального управления.
Система координат инструмента (TOOL): также состоит из трех осей, но они пересекаются не в плече, а во фланце кисти. Система координат движется с фланцем по движениям манипулятора.
Также система координат инструмента может эффективно использоваться при обучении. С пульта ручного управления выбирается режим TOOL. Нажатием кнопок «X», «Y» и «Z» пользователь потом перемещает конец инструмента прямолинейно по осям системы координат инструмента. Ему не надо управлять каждой степенью подвижности отдельно (например, сверление производится вращением инструмента в направлении оси Z).

Рис. 8. Системы координат манипулятора
1.1.4. Система управления робота
Основные характеристики системы управления «СФЕРА-36» представлены в табл. 3 и табл. 4.
Табл. 3. Характеристики системы управления
|
Принцип |
Двухуровневое микропроцессорное |
|
Язык программирования |
ARPS |
|
Устройства ввода данных |
Дисплей с клавиатурой на коде ASCII, пульт ручного управления |
|
Накопитель |
Емкость 24 Кб, с произвольным доступом и резервным питанием |
|
Внешний накопитель |
Накопитель на гибких магнитных дисках |
|
Входы/выходы |
по 32 гальванически развязанных дискретных входа и выхода:
|
|
Питание от сети |
220 В, 50 Гц, 1 фаза, потребляемая мощность не более 2 кВт |
Табл. 4. Условия окружающей среды
|
Рабочая температура |
±5…±35 C° |
|
Температура хранения |
±5…±40 C° |
|
Колебание рабочего напряжения |
-15%, +10%, ±1 Гц |
|
Относительная влажность |
20…80% при +30 С°, конденсация не допускается |
|
Вибрация |
55…150 Гц |
|
Атмосферное давление |
630…802 мм. рт. ст. |
Система управления размещена в стойке (см. рис. 9).
Структурная схема системы управления представлена на рис. 10.
Центральная ЭВМ и процессоры управления приводами (ЦПУ). ЦЭВМ является главным модулем системы управления. Она вычисляет траекторию манипулятора и обменивается информацией с окружающими устройствами через комплектующие устройства.
Основные модули ЦЭВМ:
модуль центрального процессора, длина слова 16 бит;
модуль последовательного интерфейса для связи с комплектующими;
модули параллельного интерфейса для связи с модулями управления, приводами и модулями входа/выхода;
модуль программируемого постоянного запоминающего устройства (ППЗУ), хранящий системную программу ARPS (содержимое ППЗУ не стирается при выключенном питании СУ);
модуль оперативного запоминающего устройства (ОЗУ) для записывания программ пользователя. ОЗУ имеет резервное питание от аккумуляторов, благодаря чему содержимое его не сбрасывается, даже при длительном обрыве питания;
модуль аналого-цифрового преобразователя (АЦП) для выполнения калибровки.
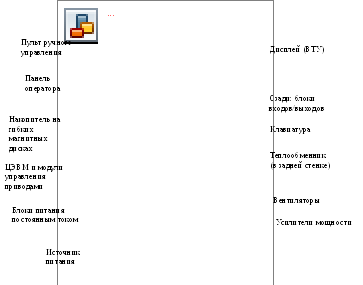
Рис. 9. Основные элементы СУ «Сфера-36»
Модули управления приводами. Для каждой степени подвижности предусмотрено две схемных платы. На одной плате смонтирован процессор управления приводом (длина слова: 16 бит), а на другой – схемы для обратной связи с соответствующего звена и схемы для управления соответствующим усилителем мощности.
Панель управления. На панели управления размещены все переключатели, кнопки и сигнальные лампы, необходимые при эксплуатации робота, а также клавиатура для программирования робота.
 .
.
Рис. 10. Структурная схема управления манипулятором
Дисплей. Совместнос клавиатурой используется для программирования робота.
Усилители мощности.Служат для управления приводами манипулятора. Усилители содержат электронную схему защиты от перегрузки.
Первичный источник питания. Через этот блок осуществляется электропитание стойки управления. Блок питания содержит главный предохранитель, ряд индивидуальных предохранителей, главный контактор, фильтр шума и разъем для нужд технического обслуживания.
Источники постоянного тока. Генерируют необходимые для работы системы управления градации постоянного тока. Блок питания манипулятора током +40 В расположен с задней стороны стойки управления.
Блок вентиляции. Служит для поддержания температуры внутри стойки управления достаточно низкой для обеспечения надежной работы системы управления.
Пульт ручного управления. Используется для управления манипулятором путем перемещения либо отдельных сочленений, либо средней точки фланца кисти по координатным системам робота.
Накопитель на гибких магнитных дисках. Программы можно записать на гибкие магнитные диски для последующей загрузки при потребности обратно в ЗУ ЦЭВМ. В накопителе используются гибкие магнитные диски квадратной формы с длиной сторон примерно 13 см. Записанная информация сохраняется на диске, пока диск не стирают специально. Использование магнитных дисков дает возможность создать библиотеку программ.
Входы/выходы для связи с внешними устройствами.
С помощью входных и выходных каналов обеспечивается электрическая связь робота с различными внешними устройствами, например, концевыми и ручными выключателями, сигнальными лампами, вентилями, программируемыми логическими контроллерами, ЭВМ, другими роботами.
Через входные каналы роботу можно дать, например, команду останова, команду перехода в определенный адрес программы или начала работы с определенной программы и т.д. Также через входной канал роботу можно сообщить о поступлении в его рабочую зону очередного изделия, чтобы робот смог начать выполнение программы в правильный момент.
Через выходные каналы робот может управлять работой внешних устройств, например, станков, конвейеров и т.д.
Упрощенная функциональная схема системы управления манипулятором приведена на рис. 11.
Кроме основных функций по управлению звеньями манипулятора система управления выполняет ряд дополнительных функций:
выполнение калибровки состояния звеньев при включении робота;
обслуживание записи новой программы оператором во время выполнения текущей задачи;
управление и контроль состояния периферийных устройств в текущем времени;
слежение за контрольными суммами ЗУ;
реализация обратной связи с двигателями манипулятора;
обмен информацией между процессорами;
контроль за перегрузкой усилителей мощности и др.

Рис. 11. Функциональная схема управления манипулятором