

Prak_Geom1
.pdf7±: Довести, що вiдстань мiж двома мимобiжними прямими l1 i l2 може бути знайдена
за формулою |
; l2) = j¡¡¡¡! |
j; |
(2.74) |
½(l1 |
|||
|
M1M2p~1p~2 |
|
|
j[p~1; p~2]j
äå M1 i p~1 точка i напрямний вектор прямо¨ l1, à M2 i p~2 точка i напрямний вектор прямо¨ l2.
Розглянемо площину ¾1, яка проходить через пряму l1 паралельно до прямо¨ l2, i площину ¾2, що проходить через пряму l2 паралельно до l1. Вiдомо, що такi площини iснують i визначаються однозначно. Ясно, що ½(l1; l2) дорiвню¹ вiдстанi мiж паралельними площинами ¾1 i ¾2. Для знаходження цi¹¨ вiдстанi побуду¹мо паралелепiпед M1N1P1Q1M2N2P2Q2 òàê, ÿê показано на рисунку на сторiнцi 121, i позначимо через V об'¹м цього паралелепiпеда.
Âiäîìî, ùî îá'¹ì V |
даного паралелепiпеда |
дорiвню¹ абсолютнiй величинi мiшаного |
|||||
добутку векторiв |
¡¡¡¡! |
, p~1 i p~2, тобто V = |
j¡¡¡¡! |
|
j |
. |
|
|
M1M2 |
M1M2p~1p~2 |
|
||||
З iншого боку,
= ½(l1; l2) ¢ j[p~1; p~2]j:
¡¡¡¡!
Таким чином, jM1M2p~1p~2j = ½(l1; l2) ¢ j[p~1; p~2]j. Звiдси отриму¹мо формулу (2.74).
121

2.3 Перетворення простору
1 Рух простору
Рух простору. Приклади рухiв в просторi. Поняття про репер в просторi. Основна теорема про рух в просторi.
Кажуть, що перетворення простору зберiга¹ вiдстань0 , ÿêùî0 вiдстань мiж0 0довiльними. точками A i B простору рiвна вiдстанi мiж ¨х образами A i B , тобто AB = A B
Означення 2.5. Перетворення простору, яке зберiга¹ вiдстань, назива¹ться рухом (або |
||||||||||||||||
перемiщенням). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Приклад 1. Нехай p~ довiльний |
|
вектор простору. Кожнiй точцi M поставим у |
|||||||||||||
вiдповiднiсть точку |
M0 |
|
|
|
|
¡¡¡! |
|
= |
p~. Òàêå |
перетворення простору назива¹ться |
||||||
|
|
òàê, ùîá MM0 |
|
|
||||||||||||
паралельним перенесенням на вектор p~. |
|
|
|
|
|
|
|
|
||||||||
|
Доведемо, що таке перетворення ¹ рухом. Справдi, нехай M1 i M2 довiльнi точки, а M10 |
|||||||||||||||
|
M0 ¨х образи. Тодi |
¡¡¡¡1 ! |
= |
|
¡¡¡¡2 ! |
= |
|
|
¡¡¡¡1 ! = |
¡¡¡¡2 !. За лемою 1.1 про рiвнiсть |
||||||
i |
2 |
|
M M0 |
|
p~ i M M0 |
|
|
p~, òîìó M M0 |
M M0 |
|||||||
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
1 |
2 |
||
|
|
M1M2 = |
¡¡¡¡!, òîìó |
|
1 2 = |
0 |
|
0. |
|
|||||||
векторiв отриму¹мо ¡¡¡¡! |
|
|
1 |
2 |
|
M M |
1 |
M |
2 |
|
||||||
|
|
|
|
|
|
M0 |
M0 |
|
M |
|
|
|||||
Приклад 2. Задамо в просторi точку O i розглянемо вiдображення простору, при якому кожна точка M переходить в точку M0, симетричну точцi M вiдносно точки O.
Таке вiдображення ¹ перетворенням простору i назива¹ться симетрi¹ю вiдносно точки O або центральною симетрi¹ю. Неважко бачити, що це перетворення ¹ рухом.
Приклад 3. Задамо в просторi площину ¾ i розглянемо вiдображення простору, при якому кожна точка M переходить в точку M0, симетричну точцi M вiдносно площини ¾.
Таке вiдображення ¹ перетворенням простору i назива¹ться симетрi¹ю вiдносно площини. Доведемо, що симетрiя вiдносно площини ¹ рух. Для цього виберемо прямокутну систему координат таким чином, щоб дана площина спiвпадала з координатною площиною Oxy.
Нехай A(x1; y1; z1) i B(x2; y2; z2) довiльнi двi точки простору, а A0 i B0 ¨х образи. Очевидно, точки A0 i B0 матимуть координати A0(x1; y1; ¡z1) i B0(x2; y2; ¡z2). За формулою (2.4) вiдстанi
мiж двома точками простору знаходимо:
p
AB = (x2 ¡ x1)2 + (y2 ¡ y1)2 + (z2 ¡ z1)2; A0B0 = p(x2 ¡ x1)2 + (y2 ¡ y1)2 + (z2 ¡ z1)2;
òîìó AB = A0B0. Отже симетрiя вiдносно площини ¹ рух.
Впорядкована четвiрка точок A, B, C, D простору, якi не лежать в однiй площинi назива¹ться репером i познача¹ться так: R = (A; B; C; D). Точки A, B, C i D називаються вершинами репера, причому точка A назива¹ться його початком. Репер назива¹ться афiнним, якщо тетраедр ABCD довiльний, i ортонормованим, якщо ребра AB, AC, AD цього тетраедра вза¹мно перпендикулярнi i AB = AC = AD = 1.
äå |
Як i для площини кожнiй системi координат O~e1~e2~e3 вiдповiда¹ репер R = (O; E1; E2; E3), |
|||
¡¡! |
¡¡! |
¡¡! |
= ~e3. Будемо казати, що точка M в реперi R ма¹ координати |
|
|
OE1 |
= ~e1, OE2 |
= ~e2, OE3 |
|
(x; y; z), ÿêùî (x; y; z) координати точки M у вiдповiднiй системi координат.
Ëåìà 2.5. ßêùî R = (A; B; C; D) i R 0 = (A0; B0; C0; D0) довiльнi афiннi репери, то iсну¹ не бiльш одного руху, який репер R переводить в репер R 0.
122

Доведення. Припустимо, що ¹ два рухи g1 i g2, якi переводять репер R в репер R 0, причому
g1 =6 g2. Це означа¹, що знайдеться така точка M, ùî ì๠ìiñöå íåðiâíiñòü g1(M) =6 g2(M). Нехай g1(M) = M1 i g2(M) = M2. Îòæå, M1 6= M2. Îñêiëüêè g1(A) = A0 i g2(A) = A0, òî AM = A0M1 (вiдносно g1) i AM = A0M2 (вiдносно g2), òîìó A0M1 = A0M2, звiдки виплива¹, що точка A0 рiвновiддалена вiд точок M1, M2. Аналогiчно показу¹мо, що точки B0, C0, D0 також рiвновiддаленi вiд точок M1, M2. Таким чином, точки A0; B0; C0; D0 лежать в площинi, яка
перпендикулярна до вiдрiзка M1M2 i проходить через його середину. Це протирiччить тому, що данi точки утворюють репер. Отже, наше припущення g1 6= g2 íåâiðíå, òîìó g1 = g2. 
Теорема 2.11 (основна теорема руху). Нехай R = (A; B; C; D) i R 0 = (A0; B 0; C 0; D 0)
довiльнi ортонормованi репери. Тодi iсну¹ один i тiльки один рух, який репер R переводить
âрепер R 0. При цьому русi довiльна точка M з даними координатами в реперi R переходить
âточку M0 з тими ж самими координатами в реперi R 0.
Доведення. Розглянемо перетворення простору g: M 7!M0, при якому точка M в реперi R i
точка M0 в реперi R 0 |
мають однаковi координати (x; y; z). Доведемо, що це перетворення |
||||
буде рухом. Справдi, |
нехай g: M1(x1; y1; z1)R |
7! |
M10(x1; y1; z1)R 0 i g: M2(x2; y2; z2)R |
7! |
|
|
|
|
|
||
M20(x2; y2; z2)R 0, äå M1; M2; M10; M20 |
точки простору. Знайдемо вiдстанi M1M2 i M10M20 |
çà |
|||
формулою (2.4): |
|
|
|
|
|
M1M2 = p(x2 ¡ x1)2 + (y2 ¡ y1)2 + (z2 ¡ z1)2; M10M20 = p(x2 ¡ x1)2 + (y2 ¡ y1)2 + (z2 ¡ z1)2;
звiдки виплива¹ M1M2 = M10M20. Îòæå, g рух. Згiдно леми 2.5 цей рух ¹диний.
Виходячи з теореми 2.11, як це було зроблено для випадку площини (див. стор. 42 44), можна довести такi властивостi руху простору:
1±:
2±:
3±:
4±:
5±:
6±:
Рух простору переводить площину в площину, а паралельнi площини у паралельнi площини.
Рух простору переводить пряму у пряму, а паралельнi прямi у паралельнi прямi.
Рух простору переводить напiвплощину у напiвплощину, напiвпростiр у напiвпростiр.
Рух простору переводить двогранний кут в рiвний йому двогранний кут. Рух зберiга¹ перпендикулярнiсть площин i прямих у просторi.
Рух простору зберiга¹ просте вiдношення трьох точок прямо¨, зберiга¹ вiдношення "лежати мiж".
Рух простору переводить ортонормований репер в ортонормований репер.
2 Два види руху. Iнварiантнi точки прямi та площини
Орi¹нтовнiсть реперiв у просторi. Iнварiантнi точки прямi та площини. Iндукований рух. Лема про рух, який нема¹ iнварiантних точок. Лема про iснування iнварiантно¨ прямо¨.
Говорять, що репери R = (O; A; B; C) i R 0 = |
(O0; A0; B0; C0) орi¹нтованi однаково |
OA; OB; OC |
¡¡! ¡¡! ¡¡! |
(протилежно орi¹нтованi), якщо базиси ¡! ¡¡! ¡! |
i O0A0; O0B0; O0C0 орi¹нтованi однаково |
|
123
(протилежно). Таким чином, репери |
R i R 0 |
однаково орi¹нтованi, якщо RjR 0 |
> 0, i |
||||||
|
R R |
< 0 |
|
R |
R |
0 |
= (OA; OB; OC) |
(¡¡! ¡¡! ¡¡!) |
|
протилежно орi¹нтованi якщо |
j 0 |
|
. Òóò |
j |
|
¡! ¡¡! ¡! j |
O0A0; O0B0; O0C |
0 : |
|
|
|
|
|
|
|
||||
Можна довести, що рух простору або зберiга¹ орi¹нтацiю простору, або змiню¹ орi¹нтацiю на протилежну.7 Отже, в просторi, як i на площинi, iсну¹ два види руху: однi зберiгають орi¹нтацiю простору, а iншi змiнюють на протилежну. В першому випадку рухи називаються рухами першого роду, а в другому рухами другого роду.
Як i у випадку площини точку простору ми назива¹мо iнварiантною (або нерухомою) точкою перетворення, якщо вона переходить сама в себе. Аналогiчно пряму (площину) назвемо iнварiантною (або нерухомою), якщо ¨¨ образ спiвпада¹ з нею. Частинним випадком iнварiантно¨ прямо¨ (площини) ¹ пряма (площина) iнварiантних точок, всi точки яко¨ ¹ iнварiантними.
Нехай g даний рух простору, а ¾ iнварiантна площина. Це означа¹, що довiльна точка площини ¾ переходить в точку цi¹¨ ж площини, тобто на площинi ¾ встановлю¹ться деяке вiдображення g 0, яке, очевидно, ¹ перетворенням. А оскiльки g зберiга¹ вiдстань, то i g 0 íà площинi ¾ також зберiга¹ вiдстань, тобто g 0 рух площини ¾. Надалi будемо казати, що вiн iндукований рухом g на площинi ¾.
Ëåìà 2.6. Якщо рух у просторi нема¹ iнварiантних точок, то довiльнi двi його iнварiантнi прямi паралельнi.
Доведення. Припустимо, що iснують двi непаралельнi iнварiантнi прямi p i q ïðè ðóñi g. В просторi логiчно можливi два випадки: а) p i q перетинаються, б) p i q мимобiжнi.
а) Нехай прямi p i q перетинаються в точцi M. Оскiльки цi прямi ¹ iнварiантними, то очевидно точка M при русi перейде сама в себе, тобто вона ¹ нерухомою. А це протирiччить
óìîâi ëåìè.
б) Позначимо через AB спiльний перпендикуляр до прямих p i q. Оскiльки при русi вiдстань мiж точками зберiга¹ться i враховуючи, що довжина перпендикуляра AB ¹ найкоротшою вiдстанню мiж даними прямими, то очевидно при русi перпендикуляр AB перейде сам в себе, звiдки виплива¹, що A 7!A i B 7!B, тобто точки A i B ¹ iнварiантними,
що неможливо згiдно умови.
Таким чином, прямi p i q паралельнi.
Ëåìà 2.7. ßêùî ðóõ g íåì๠iíâàðiàíò-
них точок, але ма¹ принаймнi три попарно паралельнi iнварiантнi прямi, що не лежать в однiй площинi, то g ¹ паралельне перенесення
на ненульовий вектор, який паралельний цим прямим.
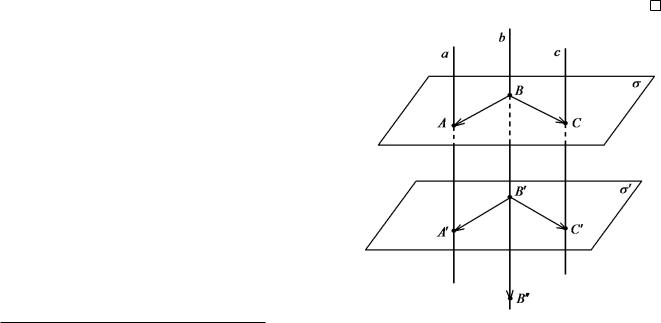
Доведення Нехай a, b i c попарно паралельнi iнварiантнi прямi руху g, якi не лежать в однiй площинi. Розглянемо яку-небудь площину ¾, перпендикулярну прямим a, b i c, та ¨¨ образ ¾ 0. Îñêiëüêè a ? ¾ i â ðóñi g пряма a переходить в себе, то a ? ¾ 0, òîìó ¾ i ¾ 0
площини.
7Доведення проводиться так, як i для випадку площини (див. стор. 44, теорема 1.24).
124

Позначимо через A; B; C i A0; B0; C0 точки перетину прямих a, b i c вiдповiдно з площинами ¾ i ¾ 0. Îñêiëüêè ¾ 7!g ¾ 0 i a, b i c iíâàðiàíòíi ïðÿìi, òî A 7!g A0, B 7!g B 0, C 7!g C 0. Позначимо
через B00 образ точки B0 в перетвореннi g. Âiäðiçêè BB0 i B0B00 ðiâíi, òîìó B0 середина âiäðiçêà BB00 (точка B00 не спiвпада¹ з точкою B, оскiльки в цьому випадку середина вiдрiзка BB0 ¹ iнварiантна точка, що протирiччить умовi леми).
 ðóñi g репер (B; A; C; B0) переходить в репер (B0; A0; C0; B00). Але при паралельному |
||||||||||||
|
|
p~ = ¡¡! |
( |
|
0) |
( |
0 |
0 |
0 |
|
00) |
|
перенесеннi на вектор |
AA0 репер |
|
B; A; C; B |
|
також переходить в репер |
B |
; A |
; C |
; B |
, |
||
òîìó ùî ¡¡! |
= ¡¡! = |
¡¡! |
= ¡¡¡! = |
|
|
|
|
|
|
|
|
|
AA0 |
BB0 |
CC0 |
B0B00 |
p~. Тому за лемою 2.5 рух g ¹ паралельне перенесення |
||||||||
на вектор p~. |
|
|
|
|
|
|
|
|
|
|
|
¤ |
Ëåìà 2.8. Довiльний рух простору ма¹ принаймнi одну iнварiантну пряму.
Цю лему наводимо без доведення.
3 Класифiкацiя рухiв простору
Рухи простору, якi мають iнварiантнi точки. Класифiкацiя рухiв простору, якi немають жодно¨ iнварiантно¨ точки. Рухи першого i рухи другого роду.
По аналогi¨ з класифiкацi¹ю рухiв площини проведемо класифiкацiю рухiв простору в залежностi вiд наявностi iнварiантних точок.
1) Рух простору ма¹ принаймнi три iнварiантнi точки, якi не лежать на однiй прямiй.
Нехай A; B; C iнварiантнi точки руху g, що не лежать на однiй прямiй, AD пряма, перпендикулярна площинi ¾, яка проходить через iнварiантнi точки. Отже, площина ¾
ïðè ðóñi g переходить сама в себе, тобто
вона ¹ iнварiантною площиною. Оскiльки перпендикулярнiсть при русi зберiга¹ться, то, очевидно, пряма AD ¹ iнварiантною. Нехай
точка D цi¹¨ прямо¨ переходить при русi в точку D0, яка також належить данiй прямiй. Можливi
такi два випадки:
а) Точка D0 спiвпада¹ з точкою D. В цьому випадку репер R = (A; B; C; D) переходить сам
в себе. Але ж при тотожному перетворенi це репер також переходить сам в себе, тому згiдно леми 2.5 даний рух ¹ тотожним перетворенням простору. Ясно, що тотожне перетворення простору ¹ рух першого роду.
б) Точки D i D0 симетричнi вiдносно точки A. Перетворення g переводить репер R = (A; B; C; D) в репер R 0 = (A; B; C; D0), але ж симетрiя вiдносно площини ABC також переводить репер R â R 0, òîìó ðóõ g в даному випадку ¹ симетрiя вiдносно площини, яка проходить через три iнварiантних точки. Неважко бачити, що RjR 0 < 0, òîìó
симетрiя вiдносно площини рух другого роду.
2) Рух простору ма¹ принаймнi двi iнварiантнi точки A i B, але нема¹ iнварiантних точок, якi не лежать на прямiй AB.
В цьому випадку кожна точка прямо¨ AB ¹ iнварiантною точкою. Справдi, нехай M довiльна точка прямо¨ AB, à M0 ¨¨ образ. Оскiльки рух зберiга¹ просте вiдношення трьох
125
точок, то, очевидно, (AB; M) = (AB; M0), òîìó M = M0, тобто M iнварiантна точка. Отже, AB ¹ прямою iнварiантних точок.
Нехай ¾ довiльна площина, перпендикулярна до прямо¨ AB i яка перетина¹ ¨¨ в деякiй
òî÷öi P . Оскiльки площина ¾ ¹ iнварiантною
для даного 0руху, тому на нiй iндуку¹ться деякий рух g . Точка P ¹ ¹диною iнварiантною
точкою цього руху, отже, g0 поворот
навколо точки P на деякий кут ', ' =6 0.
Оскiльки довiльна площина, що проходить че- рез пряму AB, переходить в площину, яка
також проходить через цю пряму, то у всiх площинах, перпендикулярних до прямо¨ AB,
iндуку¹ться поворот з одним i тим же кутом повороту '.
Розглянутий нами рух назива¹ться поворотом простору навколо прямо¨ AB íà êóò '.
Пряма AB назива¹ться вiссю повороту, а кут ' кутом повороту. При цьому русi образ X0 точки X отриму¹ться ¨¨ обертанням навколо прямо¨ AB íà êóò ' в одному i тому ж напрямку незалежно вiд вибору точки X. Можна довести, що поворот простору навколо прямо¨ ¹ рух
першого роду.
Поворот простору навколо прямо¨ на кут ¼ назива¹ться симетрi¹ю вiдносно цi¹¨ прямо¨.
Вiдмiтимо, що тотожне перетворення також вважа¹ться поворотом навколо довiльно¨ прямо¨ на кут ' = 0.
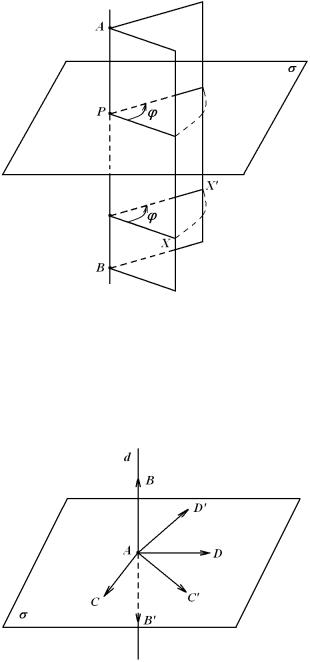
3) Рух простору ма¹ тiльки одну iнварiантну точку A.
Згiдно леми 2.8 iсну¹ принаймнi одна iнварiантна пряма d. Ясно, що точка A лежить
íà ïðÿìié d, iнакше основа перпендикуляра, опущеного з точки A на пряму d, також була б
iнварiантною, що неможливо.
Позначимо чрез ¾ площину, яка проходить через точку A i перпендикулярна до прямо¨ d. Площина ¾ ¹ iнварiантною, тому рух g iндуку¹ на нiй деякий рух g0. Ðóõ g0 ì๠òiëüêè îäíó iнварiантну точку A, тому вiн ¹ поворот навколо точки A на деякий кут ', ' 6= 0.
Ортонормований репер R = (A; B; C; D) виберемо так, щоб точка B лежала на прямiй d, а точки C i D на площинi ¾. Îñêiëüêè B не ¹ нерухомою точкою, то точка B0 = g(B) буде симетричною точцi B вiдносно точки A. Â ðóñi g репер R = (A; B; C; D) переходить в репер R 0 = (A; B0; C0; D0) причому на площинi ¾ репери (A; C; D) i (A; C0; D0) орi¹нтованi однаково, тому репери R i R 0 орi¹нтованi протилежно. Це говорить про те, що g ¹ рух другого роду. Даний рух назива¹ться поворотним вiдображенням. Пряма d, êóò ', площина ¾ i точка
A називаються вiдповiдно вiссю, кутом, площиною i центром поворотного вiдображення.
Геометрично поворотне вiдображення ¹ добуток повороту навколо прямо¨ на симетрiю вiдносно площини.
ßêùî ' = ¼, то поворотне вiдображення ¹ симетрi¹ю вiдносно нерухомо¨ точки.
126

4) Рух простору нема¹ жодно¨ нерухомо¨ точки.
Нехай рух простору g нема¹ жодно¨ iнварiантно¨ точки, тодi за лемою 2.8 вiн ма¹ iнварiантну пряму d. За лемою 2.6 довiльна iнша iнварiантна пряма, якщо така iсну¹, паралельна прямiй d. Можливi такi три випадки:
а) Iснують принаймнi три попарно паралельнi iнварiантнi прямi, що не лежать в однiй площинi. В цьому випадку згiдно леми 2.7 даний рух ¹ паралельним перенесенням простору на деякий ненульовий вектор p~. Iнварiантними прямими ¹ тi i тiльки тi прямi
простору, якi паралельнi вектору p~. Очевидно, паралельне перенесення простору рух першого роду.
б) Iснують принаймнi двi паралельнi iнварiантнi прямi, а всi iншу iнварiантнi прямi, якщо такi iснують, лежать в площинi ¾, що проходить через цi прямi. В цьому випадку рух g
назива¹ться ковзним вiдображенням. Можна показати, g ¹ добутком вiдображення вiд площини ¾ на паралельне перенесення на ненульовий вектор p~, паралельний площинi ¾. Iнварiантними прямими ¹ тiльки тi прямi, якi лежать в площинi ¾ i паралельнi вектору
p~. Оскiльки вiдображення вiд площини ¹ рух другого роду, а паралельне перенесеннярух першого роду, то, очевидно, ковзне вiдображення рух другого роду.
â) Ðóõ g ма¹ тiльки одну iнварiантну пряму d. В цьому випадку g назива¹ться гвинтовим рухом. Можна довести, що g ¹ добутком повороту навколо прямо¨ d з кутом повороту
' 6= 0на паралельне перенесення на ненульовий вектор, паралельний прямiй d. Îñêiëüêè
поворот i паралельне перенесення рухи першого роду, то i гвинтовий рух ¹ рухом першого роду.
Таким чином iснують шiсть типiв рухiв простору, якi наведенi у наступнiй таблицi:
Рухи першого роду.
1) Паралельне перенесення на вектор p~.
а) Паралельне перенесення на вектор p~ 6= 0. б) Тотожне перетворення p~ = 0.
2) Поворот навколо прямо¨ на кут '.
а) Поворот на кут ', äå ' =6 0 i ' =6 ¼. б) Тотожне перетворення (' = 0).
в) Симетрiя вiдносно прямо¨ (' = ¼).
3) Гвинтовий рух.
Рухи другого роду.
4) Симетрiя вiдносно площини.
5) Поворотне вiдображення з кутом повороту ' =6 0.
а) Поворотне вiдображення з кутом повороту ', äå ' 6= 0 i ' 6= ¼.
а) Симетрiя вiдносно точки (' = ¼). 6) Ковзне вiдображення.
4 Перетворення подiбностi простору
Означення подiбностi простору. Властивостi подiбностi простору. Гомотетiя в просторi та ¨¨ властивостi. Подiбнiсть як добуток гомотетi¨ i руху.
127
Як i у випадку площини (див. стор. 55) перетворення простору назива¹ться перетворенням подiбностi або просто подiбнiстю, якщо iсну¹ таке число k > 0, ùî äëÿ
довiльних двох точок A i B та ¨х образiв A0 i B0 викону¹ться рiвнiсть A0B0 = kAB. Число k
назива¹ться коефiцi¹нтом подiбностi.
Ïðè k = 1 перетворення подiбностi зберiга¹ вiдстань, тобто воно ¹ рухом. Отже, рух
частинний випадок подiбностi. Прикладом перетворення подiбностi, вiдмiнного вiд руху, ¹ гомотетiя, яка в просторi вводиться так саме, як i для площини (див. стор. 55). Задамо точку M0 i дiйсне число m 6= 0. Êîæíié òî÷öi M поставимо у вiдповiднiсть точку M0 òàê, ùîá
¡¡¡!0 ¡¡¡!
M0M = mM0M:
Це вiдображення назива¹ться гомотетi¹ю з центром M0 i êîåôiöi¹íòîì M1 i M2 та ¨х образiв M10 i M20 з формули (2.75) отриму¹мо рiвнiсть
(2.75)
m. Для двох точок
¡¡¡¡! |
= |
1 2 |
|
|
1 |
2 |
|
¡¡¡¡! |
(2.76) |
M0 |
M0 |
|
mM M : |
|
Звiдси виплива¹, що M10M20 = jmjM1M2. Таким чином, гомотетiя з коефiцi¹нтом m ¹
перетворенням подiбностi з коефiцi¹нтом k = jmj.
Виберемо ортонормований репер R = (O; E1; E2; E3) так, щоб точка O спiвпала з центром гомотетi¨. Якщо M(x; y; z) довiльна точка простору, а точка M0(x0; y0; z0) ¨¨ образ, то
очевидно, |
x0 = mx; y0 = my; z0 = mz: |
(2.77) |
|
Тепер точно так, як це було зроблено для випадку площини, можна довести, що:
1.гомотетiя переводить площину (пряму), що не проходить через центр гомотетi¨, в паралельну площину (пряму);
2.гомотетiя переводить площину (пряму), яка проходить через центр гомотетi¨, в себе;
3.гомотетiя зберiга¹ просте вiдношення трьох точок прямо¨;
4.гомотетiя переводить вiдрiзок у вiдрiзок, промiнь у промiнь, напiвплощину у напiвплощину, напiвпростiр у напiвпростiр;
5.гомотетiя переводить кут в рiвний йому кут.
Доведемо, що гомотетiя з коефiцi¹нтом m зберiга¹ орi¹нтацiю простору при m > 0 i змiню¹ ¨¨ на протилежну при m < 0.8 Дiйсно, нехай (A; B; C; D) довiльний репер, а
( |
A |
; B |
; C |
; D |
0) |
його образ.За формулою (2.76) отриму¹мо: A0B0 |
mAB, A0C0 |
mAC, |
||||||||||
0 |
0 |
|
0 |
|
|
|
|
|
|
|
¡¡! = |
¡! |
¡¡! = |
¡! |
||||
A0D0 |
|
mAD, òîìó |
|
|
|
|
|
|
|
|
|
|
|
|||||
¡¡! = |
|
¡¡! |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
AB; AC; AD A0B0; A0C0; A0D0 |
¯ |
1 |
0 |
0 |
¯ |
3 |
|
|
|
||
|
|
|
|
|
|
|
0 |
1 |
0 |
: |
|
|
||||||
|
|
|
|
|
|
|
(¡! ¡! ¡¡!) |
(¡¡! ¡¡! ¡¡!) = |
0 |
0 |
1 |
= m |
|
|
||||
|
|
|
|
|
|
|
|
j |
|
¯ |
¯ |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
¯ |
|
|
|
¯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¯ |
|
|
|
¯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¯ |
|
|
|
¯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¯ |
|
|
|
¯ |
|
|
|
|
Звiдси виплива¹ сформульоване вище твердження.
Аналогiчно, як i для площини, можна довести, що довiльне перетворення подiбностi простору з коефiцi¹нтом k ¹ добутком гомотетi¨ з тим же коефiцi¹нтом i довiльним
центром на деякий рух. Звiдси виплèâà¹, ùî:
8Нагада¹мо, що на площинi гомотетiя зберiга¹ орi¹нтацiю площини.
128

1.подiбнiсть простору переводить площину (пряму) в площину (пряму), паралельнi площини (прямi) у паралельнi площини (прямi);
2.подiбнiсть простору зберiга¹ просте вiдношення трьох точок прямо¨;
3.подiбнiсть простору переводить вiдрiзок у вiдрiзок, промiнь у промiнь, напiвплощину у напiвплощину, напiвпростiр у напiвпростiр;
4.подiбнiсть простору переводить кут в рiвний йому кут;
5.подiбнiсть простору зберiга¹ перпендикулярнiсть прямих та площин.
5 Афiннi перетворення простору
Означення афiнного перетворення простору. Стиск простору. Основна теорема афiнного перетворення простору. Афiннi перетворення простору першого i другого роду.
Перетворення простору назива¹ться афiнним, якщо воно довiльнi три точки M1, M2, M3,
що лежать на однiй прямiй, переводить в три точки M10, M20, M30, якi також лежать на однiй прямiй, i зберiга¹ ¨х просте вiдношення, тобто (M1M2; M3) = (M10M20; M30). Ясно, що довiльне перетворення подiбностi, зокрема довiльний рух, ¹ афiнним перетворенням.
Покажемо, що iснують афiннi перетворення, вiдмiннi вiд подiбностей. Задамо площину ¾ i додатне число k. Êîæíié òî÷öi M простору поставимо у вiдповiднiсть точку M0 òàê, ùîá
¡¡¡! |
= |
0 |
|
|
0 |
M0 |
|
¡¡¡! |
(2.78) |
M |
|
kM M; |
||
¡¡¡! 1 ¡¡¡!0,
äå M0 проекцiя точки M на площину ¾. З рiвностi (2.78) виплива¹, що M0M = k M0M тому кожна точка M0 ма¹ тiльки один прообраз.
Таким чином, побудоване вiдображення ¹ перетворенням простору; воно назива¹ться
стиском простору до площини ¾. Площина ¾ назива¹ться площиною стиску, а число k
¾
k < 1, то всi точки простору, що не лежать на площинi ¾, наближаються до площини, а якщо
k > 1, то всi точки простору вiддаляються вiд площини стиску, тобто ма¹ мiсце розтягування.
Доведемо, що стиск до площини ¹ афiнним перетворенням. Для цього виберемо прямокутну систему координат Oxyz так, щоб координатна площина Oxy спiвпала з
площиною ¾, i знайдемо аналiтичне вираження стиску з коефiцi¹нтом k до площини Oxy. ßêùî M(x; y; z) довiльна точка простору, а M0(x0; y0; z0) ¨¨ образ, то з означення стиску
виплива¹, що |
x0 = x; y0 = y; z0 = kz: |
(2.79) |
|
Нехай M1(x1; y1; z1), M2(x2; y2; z2), M3(x3; y3; z3) три точки, якi лежать на однiй прямiй,
à M10(x01; y10 ; z10 ), M20(x02; y20 ; z20 ), M30(x03; y30 ; z30 ) ¨х образи. Якщо ¸ = (M1M2; M3), то за формулами (2.3) ма¹мо:
x3 |
= |
x1 + ¸x2 |
; |
y3 |
= |
y1 + ¸y2 |
; |
z3 |
= |
z1 + ¸z2 |
: |
|
|
|
|||||||||
|
1 + ¸ |
|
|
1 + ¸ |
|
|
1 + ¸ |
|
|||
Помноживши третю рiвнiсть на k i врахувавши формули (2.79), ми отрима¹мо:
|
x0 |
+ ¸x0 |
|
|
y0 |
+ ¸y0 |
|
|
z0 |
+ ¸z0 |
|
|
x30 = |
1 |
2 |
; |
y30 = |
1 |
2 |
; |
z30 = |
1 |
2 |
: |
|
1 + ¸ |
1 + ¸ |
1 + ¸ |
||||||||||
|
|
|
|
|
|
|||||||
129

Звiдси виплива¹, що точки M10, M20, M30 лежать на однiй прямiй i (M10M20; M30) = ¸. Таким чином, стиск до площини ¹ афiнним перетворенням.
Неважко переконатись, що якщо k =6 1, то стиск до площини не ¹ подiбнiстю. Справдi,
розглянемо, наприклад, три точки O(0; 0; 0), E1(1; 0; 0) i E3(0; 0; 1) та ¨х образи O0(0; 0; 0),
E10 (1; 0; 0) i E30 (0; 0; k). ßñíî, ùî OE1 = O0E10 = OE3 = 1, O0E30 = k, òîìó O0E10 = 1 ¢ OE1, à O0E30 = k OE3.
Для афiнних перетворень простору ма¹ мiсце основна теорема, аналогiчна теоремi 1.32.
Ëåìà 2.9. Якщо афiннi перетворення f1 i f2 двi точки A i B переводять вiдповiдно в точки A0 i B0, òî f1(M) = f2(M), äå M довiльна точка прямо¨ AB.
Доведення цi¹¨ леми ми не да¹мо, оскiльки воно повнiстю спiвпада¹ з доведенням аналогiчно¨ леми 1.5.
Ëåìà 2.10. Якщо афiннi перетворення f1 i f2 три точки A, B i C, що не лежать на однiй прямiй, переводять вiдповiдно в точки A0, B0 i C0, òî f1(M) = f2(M), äå M äîâiëüíà
точка площини ABC.
Доведення. Нехай точка M довiльна точка площини ABC, вiдмiнна вiд точок A, B i C.
Доведемо, що f1(M) = f2(M). Проведемо через точку M прямi так, щоб вона перетинала якiнебудь двi з прямих AB, BC i CA в рiзних точках P i Q. За лемою 2.9 ма¹мо: f1(P ) = f2(P ), f1(Q) = f2(Q), тому за тi¹ю ж самою лемою f1(M) = f2(M). 

Теорема 2.12 (основна теорема). Нехай R = (A; B; C; D) i R 0 = (A0; B0; C0; D0) äîâiëüíi
репери,0 тодi iсну¹ одне i тiльки одне афiнне перетворення простору, яке переводить репер R â R . При цьому всяка точка M з даними координатами в реперi R переходить в точку
M0 з тими ж самими координатами в реперi R 0.
Доведення. Розглянемо вiдображення f, яке довiльну точку M(x; y; z) в реперi R переводить в точку M0(x; y; z) в реперi R 0. Далi так саме, як при доведенi основно¨ теореми 1.32 про афiннi перетворення площини, доводимо, що f шукане афiнне перетворення.
Доведемо тепер, що коли f1 яке-небудь афiнне перетворення простору, яке переводить
репер R в репер R 0, òî f1 спiвпада¹ з f. Нехай M довiльна точка простору. Проведемо через
не¨ пряму так, щоб вона перетинала якi-небудь двi з площин, що мiстять гранi тетраедра ABCD в рiзних точках P i Q. За лемою 2.10 ма¹мо f(P ) = f1(P ), f(Q) = f1(Q). Çâiäñè,
використовуючи лему 2.9, отриму¹мо: f(M) = f1(M). Таким чином, вiдображення f i f1 спiвпадають, тобто f ¹дине афiнне перетворення, яке переводить репер R â R 0. При цьому
афiнному перетвореннi точка M(x; y; z)R переходить в точку M0(x; y; z)R 0.
Користуючись цi¹ю теоремою, можна довести, що афiнне перетворення простору переводить:
1.площину (пряму) в площину (пряму);
2.паралельнi площини (прямi) в паралельнi площини (прямi);
3.вiдрiзок у вiдрiзок, промiнь в промiнь, напiвплощину у напiвплощину, напiвпростiр у напiвпростiр.
130