

Вопросы для самопроверки
Что такое конфигурирование цифрового регулятора (ЦР)?
Какие способы конфигурирования ЦР Вы знаете?
Поясните схему взаимосвязей между режимами регулятора.
Поясните назначение кнопок на передней панели ЦР.
Дайте характеристику способу конфигурирования регулятора с помощью HMI – интерфейса.
Должен знать: способы конфигурирования ТСА, схему взаимосвязей между режимами регулятора, назначение кнопок на передней панели ЦР, конфигурирование регулятора с помощью компьютерного HMI – интерфейса.
Должен уметь: конфигурировать ЦР с помощью кнопок на переднее панели регулятора, с помощью компьютерного HMI – интерфейса.
Тема 6. Реализация типовых алгоритмов управления и интеллектуальных функций цифровых регуляторов
Литература: [11], [12]
Обобщенная функциональная схема измерителей – регуляторов. Наиболее распространенным видом цифровых регуляторов является класс цифровых измерителей-регуляторов, которые широко функциональны, универсальны по отношению к управляемому объекту и имеют высокие метрологические характеристики. Измерители-регуляторы состоят из следующих обобщенных функциональных блоков (рис. 6.1):
входные устройства - служат для подключения к прибору различных типов датчиков;
блок обработки входного сигнала - включает коррекцию показаний датчиков, цифровые фильтры и вычислители дополнительных величин (разности, отношения и т.п.);
логические устройства (ЛУ) - формируют управляющие сигналы для выходных устройств;
выходные устройства (ВУ) - служат для передачи регистрирующих или управляющих сигналов на исполнительные механизмы, используются ключевые с применением опто-транзисторов/симисторов или аналоговые с цифроаналоговыми преобразователями (ЦАП).
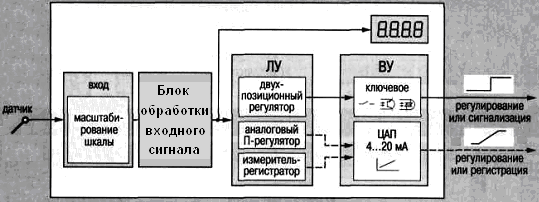
Рис. 6.1. Функциональная схема совмещенного цифрового
двухпозиционного и аналогового П-регулятора:
ЛУ - логическое устройство, ВУ - выходное устройство,
ЦАП - цифро-аналоговый преобразователь
Измеритель-регистратор - устройство, предназначенное для преобразования измеренной величины в аналоговый сигнал тока 4...20мА. При работе в режиме «измеритель-регистратор» ЛУ преобразует входную величину в аналоговый сигнал в виде тока 4...20 мА, который можно подавать на самописец или другое регистрирующее устройство. Тип соответствующего измерителю выходного устройства - цифроаналоговый преобразователь «параметр-ток 4...20 мА».
При программировании прибора устанавливаются два параметра. Первый параметр - значение нижнего предела, соответствующее минимальному значению тока. Вторым параметром для разных приборов может быть либо диапазон регистрации, либо значение верхнего предела, соответствующее максимальному значению тока.
Интеллектуальные функции. Термин "интеллектуальные" для цифровых устройств был введен для тех регуляторов, внутри которых содержится микропроцессор. Это добавляет новые функциональные возможности, которых не было в аналогичных устройствах без микропроцессора. Например, интеллектуальный датчик может давать более точные показания благодаря применению числовых вычислений для компенсации нелинейности чувствительного элемента или температурной зависимости. Интеллектуальный датчик имеет возможность работать с большой разновидностью разных типов чувствительных элементов, а также составлять одно или несколько измерений в одно новое измерение (например, объемный расход и температуру - в весовой расход). И наконец, интеллектуальный датчик позволяет производить настройку на другой диапазон измерений или полуавтоматическую калибровку, а также осуществлять функции внутренней самодиагностики, что упрощает техническое обслуживание.
Наряду с усовершенствованием работы устройств, дополнительные функциональные возможности могут сократить объем обработки сигналов системой управления и приводят к тому, что набор разных приборов заменяют приборами одной модели, что дает преимущество при изготовлении и инвестициях.
Благодаря вложенному интеллекту измерители-регуляторы могут выполнить следующие функции.
Коррекция измерений (компенсация погрешности датчиков). Для устранения начальной погрешности преобразования входных датчиков и погрешностей, вносимых соединительными проводами, измеренное прибором значение может быть откорректировано. Существует два типа коррекции, позволяющих осуществлять сдвиг или изменение наклона измерительной характеристики на заданную величину.
Сдвиг характеристики - коррекция «нуля». Сдвиг характеристики используется для уменьшения аддитивных погрешностей средства измерения. Например, коррекция для медного термопреобразователя температуры ТСМ50 с W100 = 1,426 проиллюстрирована на рис. 6.2.
К каждому измеренному значению параметра Тизм прибавляется заданное пользователем значение (рис. 6.2). Сдвиг характеристики в данном случаеИспользуется для компенсации погрешностей, вносимых сопротивлениями подводящих проводов (R) при использовании двухпроводной схемы подключения термопреобразователей сопротивления.
|
Рис. 6.2. Сдвиг характеристики датчика |
Рис. 6.3. Изменение наклона характеристики |

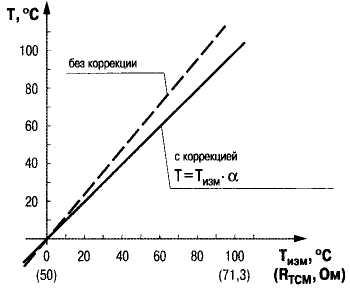
Изменение наклона характеристики. Изменение наклона характеристики используется для уменьшения мультипликативных погрешностей средства измерения. Необходимость такой операции может быть обусловлена нестабильностью коэффициента передачи преобразователя. Изменение наклона характеристики показано на рис. 6.3. для медного термопреобразователя температуры ТСМ50, W100 = 1,426; =0,00426)
Каждое измеренное значение параметра Тизм умножается на заданный пользователем в пределах 0,900...1,100 поправочный коэффициент («наклон характеристики»). Используется для компенсации погрешностей датчиков при отклонении значения W100() от номинального.
Цифровая фильтрация измерений. Цифровая фильтрация входного сигнала уменьшает влияние случайных импульсных помех на показания. В большинстве измерителей-регуляторов предусмотрена двухступенчатая фильтрация: «полосовая», устраняющая значительные единичные помехи, и «сглаживающая», снижающая действие небольших высокочастотных помех.
Первая ступень фильтрации описывается параметром «полоса фильтра», вторая - параметром «глубина фильтра» или «постоянная времени фильтра».
Полоса фильтра (рис. 6.4). Параметр «полоса фильтра» позволяет защитить измерительный тракт от сильных единичных помех. Полоса фильтра задается в единицах измеряемой величины. Если текущее показание отличается от предыдущего измеренного значения более чем на значение этого параметра, то оно игнорируется, и прибор производит повторное измерение. На цифровом индикаторе остается значение предыдущего измерения. Малая ширина полосы фильтра приводит к замедлению реакции прибора на быстрое изменение входной величины. Поэтому при низком уровне помех или при работе с быстроменяющимися процессами рекомендуется увеличить значение параметра или задать его равным 0. В случае работы в условиях сильных помех для устранения их влияния на работу прибора необходимо уменьшить значение параметра. При этом возможно ухудшение быстродействия прибора из-за повторных измерений.
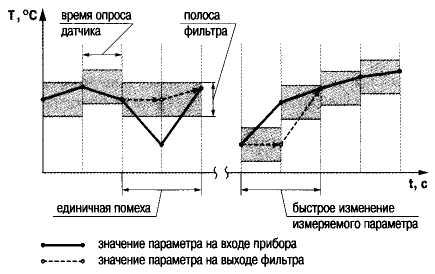
Рис. 6.4. Цифровая фильтрация измерений
Параметр «глубина фильтра» (рис.6.5) позволяет добиться «сглаживания» изменений показаний прибора за счет их усреднения. Значение этого параметра задает количество последних измерений, для которых прибор вычисляет среднее арифметическое. Полученная величина используется прибором в дальнейшей работе. Вид переходных характеристик фильтра для разных N показан на рисунке.
Уменьшение значения глубины фильтра приводит к более быстрой реакции прибора на скачкообразные изменения контролируемой вели чины, но снижает помехозащищенность прибора. Увеличение значения приводит к улучшению помехозащищенности, но вместе с этим повышает инерционность прибора.
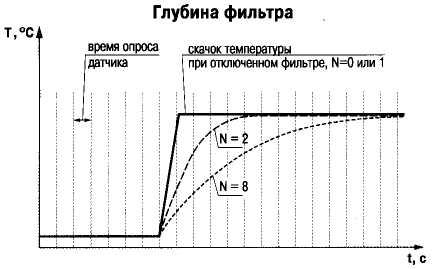
Рис. 6.5. Временное сглаживание результатов измерения «Глубина фильтра»
Параметр «постоянная времени фильтра» ф позволяет осуществлять экспоненциальное сглаживание (рис. 6.6). Постоянной времени фильтра называют интервал, в течение которого выходной сигнал достигает 0,63 от величины окончательного значения (100 °С). На рисунке показана реакция фильтра на единичный скачок температуры при различных ф. Большое значение ф приводит к замедлению реакции прибора на изменение входной величины, но помехи значительно подавлены (кривая I). Малые значения ф позволяют довольно точно отслеживать изменения входной величины, но уровень помех практически не уменьшается (кривая II).
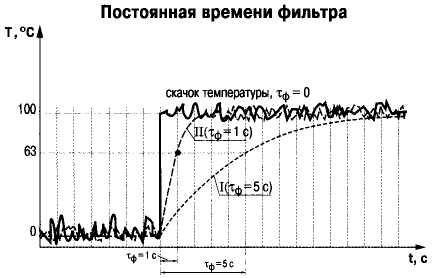
Рис. 6.6. Постоянная времени фильтра
Вычисление дополнительных величин. В ряде измерителей-регуляторов предусмотрена возможность вычисления дополнительных величин (помимо измеряемых) и их поддержания. Например, для вычисления некоторых технологических параметров требуется определить разность входных сигналов T = T1- T2. Значение разности может быть выдано на автоматическое регулирование. Наиболее часто эта возможность применяется для регулирования влажности: прибор поддерживает значение T, установленное по психрометрической таблице в соответствии с необходимым значением влажности. Разработаны вычислители влажности с заложенными значениями психрометрической таблицы, что позволяет поддерживать непосредственно влажность. Выпускаются измерители-регуляторы имеющие вычислитель квадратного корня, который может преобразовывать квадратичную характеристику дифманометра-расходомера в линейную. Возможен целый ряд функций от величин, измеренных на входах - среднее арифметическое измеренных величин, минимальное и максимальное значения измеренных величин, взвешенную сумму или частное измеренных величин и т.д.
Как правило, в измерителях-регуляторах пользователь имеет возможность задавать входную величину и режим работы логических устройств:
двухпозиционный регулятор (ON/OFF, компаратор);
аналоговый П-регулятор;
аналоговый ПИД-регулятор;
измеритель-регистратор.
При этом режим работы ЛУ и тип выходного устройства, определяемый при заказе, должны обязательно соответствовать друг другу.
Двухпозиционный регулятор (релейный, ON/OFF, компаратор). В режиме двухпозиционного регулятора (компаратора) ЛУ сравнивает значение входной величины с уставками и выдает управляющий сигнал на выходное устройство в соответствии с заданной логикой.
Выходной сигнал двухпозиционного регулятора может иметь только два значения: максимальное и минимальное. Одно из них включает, а другое выключает выходное устройство. Поэтому для работы ЛУ в режиме двухпозиционного регулятора требуется выходное устройство ключевого типа (э/м реле, оптотранзистор, оптосимистор, выход для управления внешним твердотельным реле).
Тип логики двухпозиционного регулятора, уставка Туст и гистерезис задаются пользователем при программировании прибора.
Двухпозиционный регулятор (компаратор) сравнивает значение измеренной величины с эталонным (уставкой). Если входной сигнал (измеренная величина) пересекает пороговый уровень (уставку), состояние выходного сигнала изменяется на противоположное (рис. 6.7).
|
|
|
Рис. 6.7. Тип логики двухпозиционного регулятора |
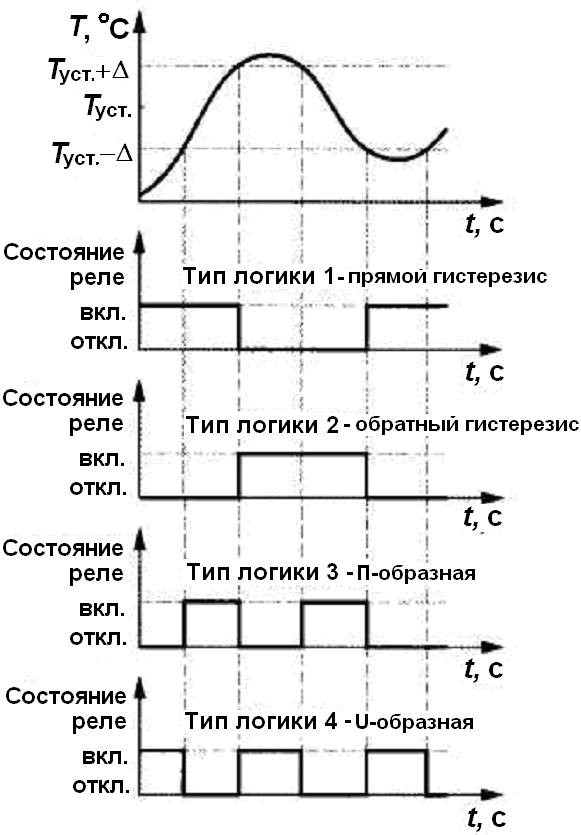
Тип логики 1 (прямой гистерезис). Применяется в случае использования прибора для управления работой нагревателя (например, ТЭНа) или сигнализации о том, что значение текущего измерения Т меньше уставки Туст. При этом выходное устройство, подключенное к ЛУ, первоначально включается при значениях Т < Туст , выключается при Т < Туст + и вновь включается при Т < Туст , осуществляя тем самым двухпозиционное регулирование температуры объекта по уставке Туст с гистерезисом ±.
Тип логики 2 (обратный гистерезис). Применяется в случае использования прибора для управления работой «холодильника» (например, вентилятора) или сигнализации о превышении значения уставки. При этом выходное устройство первоначально включается при значениях Т < Туст + , выключается при Т < Туст и вновь включается при Т < Туст + , также осуществляя двухпозиционное регулирование.
Тип логики 3 (П-образная). Применяется при использовании прибора для сигнализации о входе контролируемой величины в заданные границы. При этом выходное устройство включается при Туст < Т < Т < Туст + .
Тип логики 4 (U-образная). Применяется при использовании прибора для сигнализации о выходе контролируемой величины за заданные границы. При этом выходное устройство включается при Т < Туст и Т < Туст + .
Задержка включения и выключения выходного устройства. Для защиты выходного устройства от частых срабатываний при работе ЛУ в режиме компаратора во многих приборах имеются параметры для установки времени задержки включения tвкл и времени задержки выключения tвыкл выходного устройства (рис. 6.8). ЛУ включает (выключает) выходное устройство, если условие, вызывающее изменение состояния, сохраняется, как минимум, в течение времени, установленного в этих параметрах.
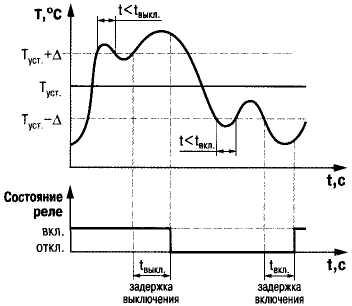
Рис. 6.8. Задержка включения и выключения выходного устройства
Удержание выходного устройства в замкнутом и разомкнутом состоянии в течение заданного времени. Для аварийной сигнализации о выходе параметра за установленные границы во многих приборах можно задать минимальное время удержания выхода в замкнутом и разомкнутом состоянии. ЛУ удерживает выходное устройство в соответствующем состоянии в течение заданного времени, даже если по логике работы устройства сравнения требуется переключение (рис. 6.9).

Рис. 6.9. Удержание выходного устройства в замкнутом и разомкнутом
состоянии в течение заданного времени
Представленный на рис. 6.10 цифровой измеритель-регулятор управляет нагрузкой одним из двух методов: импульсным, если ВУ1 – ключевого типа и аналоговым, если ВУ1 – ЦАП 4...20 мА или 0...10 В. ВУ2 может быть использовано для сигнализации об аварийной ситуации или блокировки оборудования, если ВУ2 – ключевое или для регистрации измеренной величины, если ВУ2 – ЦАП 4...20 мА. ВУ2 может работать независимо от ПИД-регулятора по своим уставкам в режиме двухпозиционного регулирования. Для управления трехфазной нагрузкой в прибор может оснащаться только одним ВУ – тремя симисторными оптопарами, имеющими схему контроля перехода через ноль.

Рис. 6.10. Функциональная схема совмещенного цифрового
двухпозиционного и аналогового ПИД-регулятора:
ВУ1 - выходное устройство ключевого типа,
ЦАП - цифро-аналоговый преобразователь,
ВУ2 - выходное устройство - реле
Обнаружение обрыва в цепи регулирования (LBA). Измеритель регулятор контролирует скорость изменения регулируемой величины. Если при подаче максимального управляющего воздействия измеряемое значение регулируемой величины не меняется в течение определенного времени, прибор выдает аварийный сигнал.
Интерфейс RS-485. В измерителе регуляторе установлен модуль интерфейса RS-485, организованный по стандартному протоколу. Интерфейс RS-485 позволяет конфигурировать прибор на ПК по приложенной программе и передавать в сеть текущие значения измеренной величины и выходной мощности регулятора, а также любых программируемых параметров.
Регулятор аналогового типа. Принцип ШИМ. В режиме аналогового регулирования ЛУ рассчитывает отклонение Е текущего значения контролируемой величины Т от заданной уставки Туст (т.е. рассогласование). В результате на выходе регулятора вырабатывается аналоговый сигнал Y, который направлен на уменьшение рассогласования Е (рис. 6.11). Этот сигнал подается на исполнительное устройство регулятора в виде тока или последовательности импульсов (ШИМ).

Рис. 6.11. Функциональная схема системы регулирования
Если выходное устройство регулятора ключевого типа (реле, транзисторная или симисторная оптопара, выход для управления твердотельным реле), выходной сигнал преобразуется в последовательность управляющих импульсов с длительностью, пропорциональной выходному сигналу Y (рис. 6.12, в и 6.13).
Если в качестве выходного устройства используется ЦАП, выходной сигнал преобразуется в пропорциональный ему ток 4...20 мА или напряжение 0...10 В (рис. 6.12, б).
|
для нагревателя |
Рис. 6.13. ШИМ-сигнал при различных значениях выходного сигнала |
 Рис.
6.12. Принцип ШИМ
Рис.
6.12. Принцип ШИМ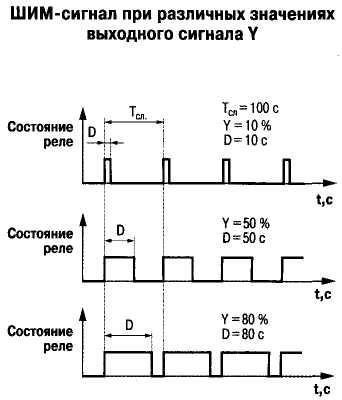
Зона нечувствительности. Для исключения излишних срабатываний регулятора при небольшом значении рассогласования , для вычисления значений Y используется уточненное значение р, вычисленное в соответствии с условиями:
если b, то р = 0;
если > b, то р = b;
если < b, то р = + b,
где b - зона нечувствительности (рис. 6.14).
Прибор будет выдавать управляющий сигнал только после того, как регулируемая величина выйдет из этой зоны. Зона нечувствительности не должна превышать необходимую точность регулирования.

Рис. 6.14. Зона нечувствительности
Ограничение управляющего сигнала. Так как рабочий диапазон исполнительного механизма всегда ограничен, для выходного управляющего сигнала Yвых задаются ограничения в виде максимального и минимального значений. Если выходной сигнал регулятора Y превышает заданную величину Yогр.max, то на исполнительное устройство выдается сигнал Yогр.max, если сигнал меньше заданной величины Yогр.min, то выдается сигнал Yогр.min (рис. 6.15) . Кроме того, в некоторых регуляторах можно задать скорость изменения выходного сигнала, что позволяет избежать резких воздействий на исполнительные устройства.
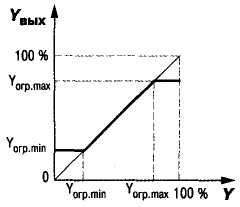
Рис. 6.15. Ограничение управляющего сигнала
Зона накопления интеграла. Если рассогласование долго сохраняет знак, величина интегральной составляющей становится очень большой (эффект интегрального насыщения), что может привести к перерегулированию.
Для устранения влияния этого эффекта задают зону накопления интеграла, в пределах которой регулятор вычисляет интегральную составляющую. За пределами этой зоны, где интегральная сумма слишком велика, для формирования управляющего сигнала используется только пропорциональная составляющая (рис. 6.16). В зависимости от режима работы регулятора (нагреватель или холодильник), эта зона расположена выше или ниже уставки. Если регулятор управляет задвижкой без датчика положения, значение этого параметра не влияет на работу регулятора.
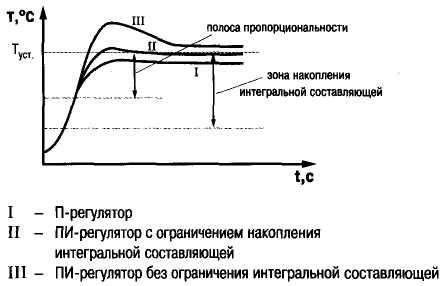
Рис. 6.16. Зона накопления интеграла:
I – П-регулятор, II – ПИ-регулятор с ограничением интегральной составляющей, III- ПИ-регулятор без ограничениея интегральной составляющей
Ограничение скорости выхода на уставку. Ограничение скорости выхода контролируемой величины на заданное значение используется для предотвращения перерегулирования при запуске системы (кривая I). Фиксированное значение уставки заменяют на «плавающее», которое постепенно приближают к значению Туст (кривая II). Приближение происходит сначала со скоростью vуст, затем скорость постепенно уменьшается (рис. 6.17). Рекомендуемое значение vуст определяется прибором при автонастройке и обеспечивает первоначальную величину перерегулирования (первого «выбега») не более .
При использовании скорости выхода на уставку возрастает время выхода на рабочий режим. Поэтому если задержка приводит к неудовлетворительным результатам, нужно увеличить vуст или отключить действие параметра.

Рис. 6.17. Ограничение скорости выхода на уставку
Период управляющих импульсов. При использовании ПИД-регулятора с выходным устройством ключевого типа (э/м реле, транзисторная или симисторная оптопара) необходимо устанавливать период управляющих импульсов. Чем выше частота управляющих импульсов (т.е. меньше период Tшим), тем быстрее реакция регулятора на внешние возмущения.
В идеале частота импульсов управления должна совпадать с частотой опроса датчика. Однако, если при использовании на выходе ПИД-регулятора электромагнитного реле или пускателя установить слишком большую частоту (т.е. слишком низкое значение Tшим), то частые переключения приведут к быстрому износу силовых контактов. Поэтому значение Tшим приходится увеличивать, но необходимо понимать, что качество регулирования при этом может ухудшиться.
При использовании в качестве выходных устройств электронных ключей (транзисторных или симисторных оптопар) проблемы износа контактов не возникает и значение Tшим можно установить равным периоду опроса датчика.
Автонастройка позволяет определять значение Tшим, которое не будет оказывать отрицательного влияния на работу системы.
Выходные устройства. Выходные устройства (ВУ) предназначены для передачи выходного управляющего сигнала на исполнительные механизмы либо для передачи данных на регистрирующее устройство. ВУ подразделяются на устройства ключевого и аналогового типов.
Выходные устройства ключевого типа. К выходным устройствам ключевого типа относятся:
электромагнитное реле;
транзисторная оптопара;
симисторная оптопара;
выход для управления внешним твердотельным реле.
Выходное устройство ключевого типа используется для управления (включения/выключения) нагрузкой либо непосредственно, либо через более мощные управляющие элементы, такие как пускатели, твердотельные реле, тиристоры или симисторы.
Цепи ключевых выходных устройств имеют гальваническую изоляцию от схемы прибора. Исключение составляет выход для управления внешним твердотельным реле. В этом случае гальваническую изоляцию обеспечивает само твердотельное реле.
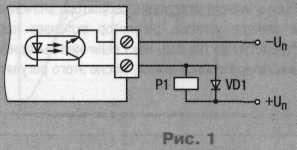
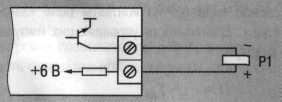
Транзисторная оптопара применяется, как правило, для управления низковольтным электромагнитным или твердотельным реле (до 60 В постоянного тока). Схема включения приведена на рис. 6.18. Во избежание выхода из строя транзистора из-за большого тока самоиндукции параллельно обмотке реле Р1 необходимо устанавливать диод VD1, рассчитанный на ток 1А и напряжение 100 В.
|
Рис. 6.18. Ключевое выходное устройство - транзисторная оптопара |
Рис. 6.19. Ключевое выходное устройство - симисторная оптопара |

Симисторная оптопара. Оптосимистор включается в цепь переменного тока управления мощного симистора через ограничивающий резистор R1 по схеме, приведенной на рис. 6.19. Значение сопротивления резистора определяет величина тока управления симистора.
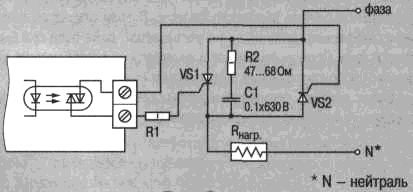
Оптосимистор может также управлять парой встречно-параллельно включенных тиристоров VS1 и VS2 (рис. 6.20). Для предотвращения пробоя тиристоров из-за высоковольтных скачков напряжения в сети к их выводам рекомендуется подключать фильтрующую RC-цепочку (R2С1). Оптосимистор имеет встроенное устройство перехода через ноль и поэтому обеспечивает полное открытие подключаемых тиристоров без применения дополнительных устройств.
|
Рис. 6.20. Управление тиристорами оптопарой |
Рис. 6.21. Управление твердотельным реле |
Выход для управления твердотельным реле выполнен на основе транзисторного ключа n-p-n-типа (рис. 6.21), который имеет два состояния: низкий логический уровень соответствует напряжениям 0...1 В, высокий уровень - напряжениям 4...6 В. Данный используется для подключения твердотельного реле, рассчитанного на управление постоянным напряжением 4...6 В с током управления не более 100 мА. Внутри выходного элемента устанавливается ограничительный резистор Rогр номиналом 100 Ом.
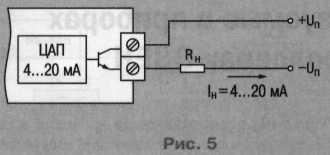
Выходные устройства аналогового типа. Выходное устройство аналогового типа - это цифроаналоговый преобразователь (ЦАП), который формирует токовую петлю 4...20 мА (рис.6.22) или напряжение 0...10 В и, как правило, используется для управления электронными регуляторами мощности.
Цепи аналоговых выходных устройств имеют гальваническую изоляцию от схемы прибора.
|
Рис. 6.22. Выходное устройство ЦАП с источником постоянного тока |
Рис. 6.23. Выходное токовое устройство ЦАП с ограничителем |
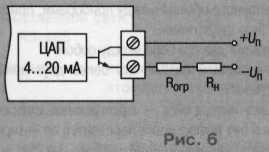
Если по какой-либо причине напряжение источника питания ЦАП, находящегося в распоряжении пользователя, превышает расчетное значение, то последовательно с нагрузкой необходимо включить ограничительный резистор (рис. 6.23). Напряжение источника питания ЦАП 4...20 мА не должно превышать 36 В.
Для работы ЦАП 0...10 В используется внешний источник питания постоянного тока (для ВУ1 см. рис. 6.24), номинальное значение напряжения которого Uп находится в диапазоне 15...32 В. Сопротивление нагрузки Rн, подключаемой к ЦАП, должно быть не менее 2 кОм.
Напряжение источника питания ЦАП 0...10 В не должно превышать 36 В.
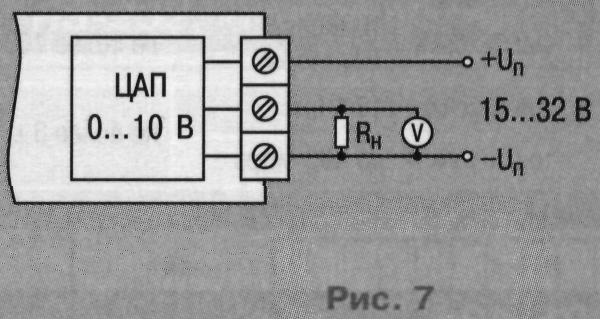
Рис. 6.24. Выходное устройство ЦАП по напряжению постоянного тока