

Обобщенные преимущества систем пневмоавтоматики
|
Преимущества |
Пояснения |
|
1. Доступность воздуха |
Воздух берется из атмосферы |
|
2. Транспортабельность |
Воздух легко транспортируется по трубопроводам на большие расстояния |
|
3. Способность к аккумулированию |
Сжатый воздух может накапливаться в резервуарах, в том числе в переносных |
|
4. Нечувствительность к колебаниям температуры, вибрациям, электромагнитным и радиационным помехам |
Сжатый воздух может работать при высоких температурах, вибрациях, электромагнитных и радиационных помехах |
|
5. Взрывобезопасность |
Сжатый воздух взрыво-и пожаробезопасен |
|
6. Экологическая чистота |
Сжатый воздух без распыленного в нем масла не чистота загрязняет окружающую среду |
|
7. Простота конструкции пневмоэлементов |
Пневмоэлементы просты в производстве и поэтому недороги |
|
8. Высокая скорость перемещения |
Сжатый воздух перемещается с большей скоростью, что позволяет получить высокую скорость движения пневмопривода. |
|
9. Нечувствительность к перегрузкам |
Пневматические инструменты и исполнительные устройства не боятся перегрузки и могут нагружаться вплоть до полной остановки |
Некоторые недостатки систем пневмоавтоматики сведены в табл. 9.2.
Таблица 9.2
Недостатки систем пневмоавтоматики
|
Недостатки |
Пояснения |
|
1. Необходимость подготовки сжатого воздуха к работе |
Сжатый воздух должен быть хорошо подготовлен против опасности быстрого износа пневмоустройств из-за наличия в нем твердых включений и конденсата воды |
|
2. Сжимаемость воздуха |
Сжатый воздух не позволяет получить равномерную и постоянную скорость выходного звена пневмоустройств |
|
3. Ограничения по усилию |
Сжатый воздух является экономически выгодным только до определенных давлений, что ограничивает усилия пневмоприводов диапазоном до 50000 Н |
|
4. Ограничения по дальнодействию и быстродействию |
Дальнодействие пневмосистем ограничивается несколькими сотнями метров, а быстродействие - скоростью звука |
|
5. Уровень шума |
Прямой сброс воздуха в атмосферу сопровождается сильным шумом |
Основные уравнения пневматики нелинейны. Однако это создает проблемы, в основном, больше при анализе пневмосистем, чем при их проектировании.
Перенос из электроники в область пневмоавтоматики элементного принципа построения приборов позволил отказаться от трудоемкого конструирования каждого отдельного прибора. Элементный способ построения вычислительных приборов и устройств пневмоавтоматики нашел свое воплощение в отечественной Универсальной системе элементов промышленной пневмоавтоматики (УСЭППА). В настоящее время используются промышленные изделия пневмоавтоматики, выпускаемые крупными фирмами, такими, как Фесто, по международным стандартам. Эти фирмы имеют филиалы по всему миру, и специалисты могут по каталогам выбирать и заказывать необходимые устройства для построения пневмосистем.
Подобно тому, как в свое время в области электроавтоматики зародилось новое техническое направление - электроника, так и в области пневмоавтоматики возникло новое направление - пневмоника, или струйная техника. Принципы струйной техники коренным образом отличаются от всех ранее известных принципов построения пневматических приборов. В приборах струйной техники полностью отсутствуют какие-либо механические подвижные детали, а управление осуществляется за счет взаимодействия струй воздуха. Приборы струйной техники миниатюрны и допускают применение технологии печатных схем. В струйной технике используются как постоянные, так и переменные пневматические токи, что обеспечивает получение высокой точности при создании приборов.
Одним из сравнительно новых направлений пневматики является пневмоакустика. В основе пневмоакустики лежит свойство воздушных струй взаимодействовать со звуковыми сигналами.
Принципы конструирования ПСА. Серийные ПСА строят на основе принципов компенсации перемещений и сил.
Устройства и приборы ПСА, построенные на принципе компенсации перемещений, основаны на преобразователях пневмосигналов в линейные перемещения и содержат механические рычаги, тяги и другие элементы. Такие устройства имеют сложную механическую часть, обладают небольшими коэффициентами усиления и низкой эксплуатационной надежностью.
Устройства ПСА, базирующиеся на принципе компенсации сил, содержат преобразователи давлений в усилия и мембранные компараторы. Для таких устройств характерны почти полное отсутствие механических узлов, малые перемещения чувствительных элементов и большие коэффициенты усиления. На этом принципе сконструированы пневматические устройства и приборы ГСП.
Конструктивное оформление ПСА. Отечественные ПСА имеют четыре условных уровня агрегатизации: элементный, модульный (агрегатный); приборный и блочный.
Под элементом в ПСА понимают законченную конструкцию, предназначенную для выполнения одной простой операции (усиление, сложение, преобразование и т.п.). Элементы условно классифицируют на простые (неделимые) и сложные (составные). Простые элементы (дроссели, емкости, мембраны, пружины и др.) не имеют самостоятельного значения в ПСА, их используют для конструирования более сложных элементов (типа пневмокамер, усилителей, реле и т.п.).
Совокупность элементов с унифицированными сигналами и единым конструктивным оформлением образует систему элементов. Применяемые системы элементов ПСА обычно избыточны, в их состав входят более сложные узлы, ячейки, модули с единым конструктивным оформлением. Отечественные ПСА базируются преимущественно на универсальной системе элементов промышленной пневмоавтоматики (УСЭППА), комплексе миниатюрных элементов и модулей пневмоавтоматики (КЭМП) и - частично - системе элементов струйной техники.
Элементы ПСА по характеру изменения сигналов во времени разделяют на аналоговые и дискретные. Сигналы аналоговых элементов изменяются в стандартном диапазоне (20-100) кПа, дискретные сигналы принимают условное значение "0" (не более 10 кПа) и "1" (не менее 110 кПа). Питание всех элементов УСЭППА и КЭМП осуществляется сжатым воздухом давлением (140 ± 14) кПа.
Элементы УСЭППА и КЭМП конструктивно допускают "печатный" монтаж на платах с расположенными в них межэлементными каналами. Элементы УСЭППА имеют небольшие габаритные размеры - в среднем 404050 мм; линейные размеры элементов КЭМП уменьшены в 1,5-3 раза.
Элементы ПСА применяют для построения более сложных устройств - модулей (ячеек), выполняющих самостоятельные функции типа интегрирование, дифференцирование, запоминание и т.п. Конструктивно модуль представляет собой единое устройство, состоящее из группы элементов, которые закреплены на унифицированной плате и соединены внутренними коммуникационными каналами.
Модули с унифицированными информационными и конструктивными характеристиками называют агрегатами. Каждый агрегат предназначен для выполнения определенной функции системы контроля или регулирования, например сигнализации, стабилизации, регистрации. Агрегатные унифицированные системы (АУС) широко применяли в 50 - 60-е годы для автоматизации химических производств.
Приборное конструктивное оформление ПСА предполагает размещение в корпусе одного прибора всех (или почти всех) ячеек, реализующих АСР - измерительного, задающего, регулирующего и регистрирующего устройства. Приборные ПСА строят по принципу компенсации перемещений, что снижает их функциональные возможности и усложняет эксплуатацию. Такие ПСА широко применяли для автоматизации химических производств в 30 - 50-е годы; в настоящее время их иногда производят в форме встроенных регуляторов.
Блочное конструктивное оформление ПСА применяют при построении систем контроля и управления сложных ТОУ. В этом случае систему управления делят на ряд взаимосвязанных блоков, содержащих однотипные функциональные агрегаты или модули, например регуляторы, регистраторы, сигнализаторы и т.п. Блочная компоновка упрощает проектирование, монтаж и эксплуатацию пневматических систем управления. Блочный принцип построения широко используют при создании пневматических и пневмоэлектрических комплексов ТСА типа "Центр", "Режим", "Ритминал".
Элементы и устройства пневматических средств автоматизации
Простые элементы ПСА. К простым элементам ПСА относят емкости, пневмосопротивления (ПС) или дроссели, пневмопроводы, мембраны, сильфоны, пружины, рычаги.
Пневмоемкости предназначены для накопления сжатого воздуха; основной характеристикой их служит постоянный или переменный объем V. Емкость с постоянным объемом показана на рис. 9.1, а, условное обозначение емкости в схемах ПСА изображено на рис. 9.1, б. В УСЭППА применяют емкости типа ПОЕ.50 с постоянным объемом V = (50±8) см3, в КЭМП- емкость типа ЕАМП с V=(25±4) см3.
Пневмосопротивления (ПС) применяют для создания местного сопротивления потоку воздуха и изменения его расхода G. Пневмосопротивления разделяют на постоянные, регулируемые вручную и переменные. В постоянных ПС типа жиклер, капилляр (рис. 9.2, а, б) площадь F проходного сечения неизменна. В регулируемых ПС типа конус - конус, цилиндр - цилиндр, шарик - цилиндр (рис. 9.2, в, г, д) и переменных дросселях типа сопло - заслонка (рис. 9.2, е) площадь F изменяет человек или какое-либо техническое устройство.
Пневмопроводы служат для передачи импульса давления (реже -расхода) на расстояния до 250 - 300 м. Их изготовляют из пластмассовых (металлических) трубок внутренним диаметром d = 4-8 мм.
Мембраны применяют для преобразования давления р или перепада Р в перемещение h или в силу Ф. Наиболее часто используют "вялые" плоские или гофрированные мембраны из тонкой прорезиненной ткани с малой собственной упругостью. Такие мембраны имеют жесткие центры диаметром d и при малых h рассматриваются как усилительные звенья.

Рис. 9.1. Схемы емкостей:
а–постоянного объема; б–условное обозначение емкости
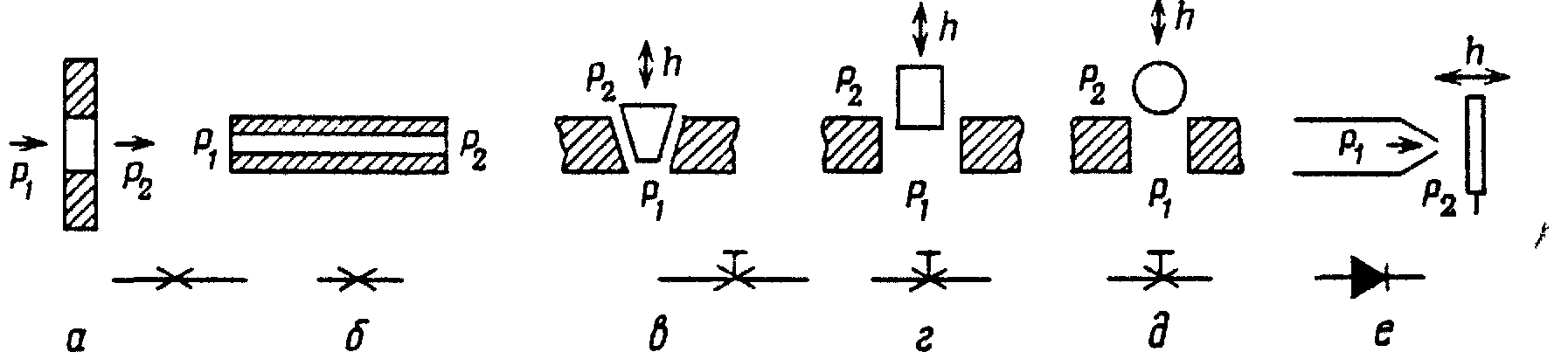
Рис. 9.2. Схемы пневматических сопротивлений и их условные обозначения:
а – жиклер; б – капилляр; в – конус – конус; г – цилиндр – цилиндр;
д – шарик – цилиндр; е – сопло–заслонка
Сильфоны предназначены для преобразования перепада Р в перемещение h или силу Ф. Тонкостенные гофрированные сильфоны со значительным коэффициентом собственной жесткости kс при Р < 200 кПа в области низких частот рассматривают как линейные усилительные звенья.
Пружины используют в пневматических устройствах для преобразования силы Ф в перемещения h. В области низких частот цилиндрические пружины характеризуют как усилительные звенья.
Механические рычаги применяют в ПСА для суммирования перемещений и сил. Рычажный сумматор малых перемещений х1, х2 имеет две оси вращения, сумматор сил конструируют на одноосном рычаге, снабженном уравновешивающей пружиной.
Сложные элементы ПСА. К ним относят пневматические камеры, дроссельные делители, преобразователи перемещений и сил в давление, усилители давления и мощности, сумматоры и реле.
Пневмокамеры служат для аккумуляции сжатого воздуха и изменения его давления во времени по определенному закону. Камера состоит из емкости объемом у и нескольких ПС на вводах.
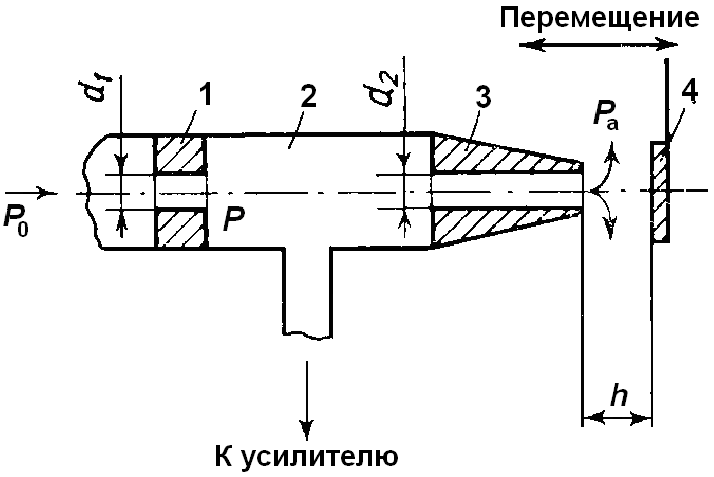
Преобразователь перемещения в давление применяют в приборах ПСА для трансформации малых перемещений h заслонки (мембраны) чувствительного элемента в большие изменения давления Р. Такие преобразователи строят на переменных ПС типа «сопло – заслонка», охваченных отрицательной обратной связью В системах пневмоавтоматики основным управляющим устройством является элемент типа «сопло – заслонка» (рис. 9.3). Давление питания Р0 подается через дроссель 1 в междроссельную камеру 2, по которой воздух вытекает через дроссель 3 в атмосферу. В камере 2 устанавливается давление Р, зависящее от Р0 и пропускной способности дросселей 1 и 3. Обычно Р0, d1 и d2 постоянны; поэтому Р зависит только от величины х перемещения заслонки 4. На рис. 9.3, б приведена статическая характеристика элемента «сопло − заслонка». Диаметр постоянного дросселя 1 берется обычно равным 0,1 − 0,2 мм, а диаметр сопла 3 составляет 0,4 − 0,5 мм. Перемещение заслонки h лежит в пределах от 0 до 0,1 мм.

а б
Рис. 9.3. Схема преобразователя перемещения в давление:
а - ПС типа «сопло – заслонка»;
б - статическая характеристика элемента «сопло − заслонка»
Преобразователи силы в давление конструируют на базе рассмотренного преобразователя перемещения в давление.
Усилители давления предназначены для усиления алгебраической суммы одного, двух или четырех давлений.
Двухвходовые усилители конструируют на основе двух последовательно включенных переменных ПС типа сопло-заслонка и мембранного сумматора сил, формируемых давлениями Р1и Р2 (рис. 9.4, а). Принцип работы мембранного сумматора заключается в уравновешивании равнодействующих противоположных сил, возникающих под действием давлений Р1 и Р2. Равнодействующая сила под действием давления Р1 направлена вниз, по причине большей эффективной площади средней мембраны и соответственно перемещает мембранный блок вниз. Это приводит к открытию элемента «сопло-заслонка» питания и прикрытию элемента «сопло-заслонка» соединения с атмосферой, т.е. увеличению выходного давления Р. Поэтому давление Р1 соответствует положительному, соответственно Р2 – отрицательному знаку при суммировании. Возникающий разбаланс сил на сумматоре компенсируется за счет собственной жесткости "вялых" мембран. Обычно эта жесткость невелика, и зона линейности статической характеристики
Р=f(Р), Р=Р1Р2,
также очень мала и не превышает 200 Па (коэффициент усиления равен 600 - 700). Статическая характеристика усилителей имеет малое начальное смещение |C 200 Па и небольшую зону гистерезиса.
Усилители давления УСЭППА называют элементами сравнения. Трехмембранный элемент П2ЭС.1 (рис. 9.4, а) сравнивает два давления Р1 и Р2 и в зависимости от знака их разности формирует на выходе сигнал "0" или "1" (в системе КЭМП аналогичный элемент назван компаратором КАМП). Выходной сигнал вне зоны линейности равен нулю или единице.

![]()
а б
Рис. 9.4. Схема двухвходового усилителя давления:
а – схема; б – упрощенное обозначение
Элементы сравнения используют для построения сумматоров двух, трех или четырех давлений. В динамическом отношении сумматоры представляют усилительный элемент при частотах до 10-20 рад/с; основная погрешность сумматора на базе П2ЭС.3 не выше 0,5%.
Устройства ПСА. К устройствам, состоящим из нескольких элементов, условно относят мощные повторители, интеграторы, умножители, дифференциаторы, сумматоры, селекторы, квадраторы и т.п. Некоторые из этих устройств конструктивно оформлены как единое изделие (например, сумматоры, дифференциаторы и т.д.), другие устройства (интеграторы, генераторы и т.п.) используют только как составные части приборов и регуляторов.
Преобразователи пневмоэлектрические и электропневматические предназначены для преобразования рода энергии непрерывных сигналов.
Преобразователь типа ППЭ-2 преобразует с погрешностью 1% пневматический сигнал в сигнал постоянного тока 0-5, 0-20 или 4-20 мА (при нагрузке на выходе не более 2,5 кОм). Принципиальная схема устройства приведена на рис. 9.5, а. Пневмосигнал Р1 поступает в манометрическую трубку (Д), которая перемещает постоянный магнит (М) в управляемом дросселе (УД) с обмотками возбуждения (ОВ) и обратной связи (ОС). Электрический сигнал, пропорциональный Р1, выделяется на сопротивлении R, включенном через триггер Шмидта Т в обмотку 0В. Сигнал от резистора R поступает на усилитель (УС) и далее на выход преобразователя. Часть тока Iв вводят в обмотку ОС дросселя. В контуре «триггер Т - обмотка OB - сопротивление R» возникают автоколебания тока, среднее значение и знак которого пропорциональны величине и направлению перемещения магнита М и выходному току Iв. Параметрами настройки преобразователя служат сменное сопротивление R1 и корректор нуля в УС.
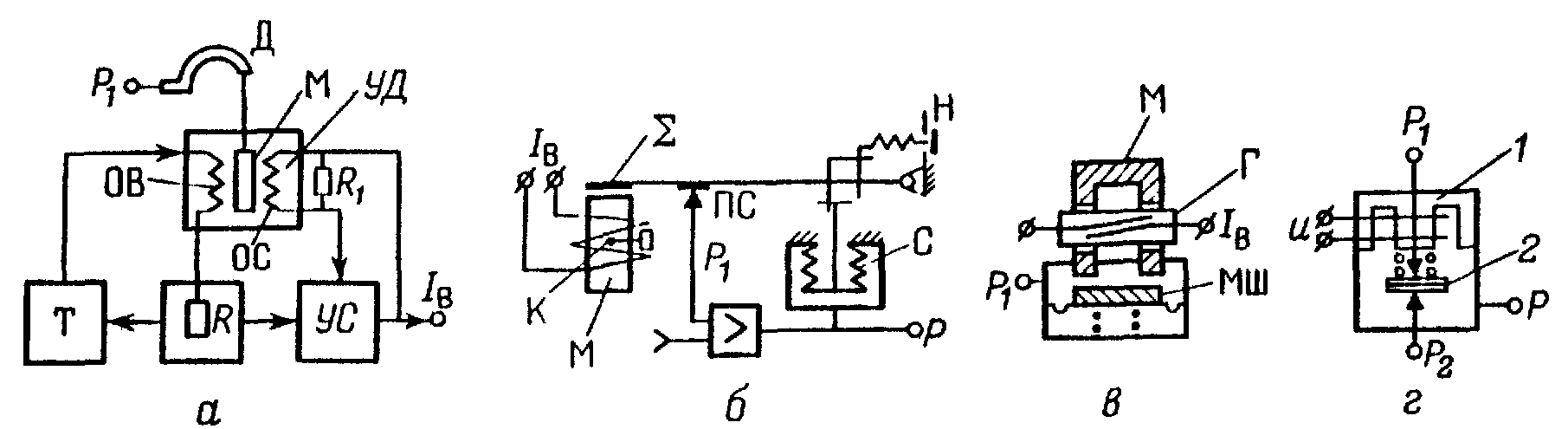
Рис. 9.5. Схемы устройства преобразования рода сигнала:
а–пневмоэлектрический преобразователь ППЭ-2;
б – электропневматический преобразователь ЭП-0000;
в – герконовый преобразователь типа ППЭД.1;
г – преобразователь типа П1ПР.5
Преобразователь ЭП-0000 преобразует электрические сигналы 0-5, 0-20 или 4-20 мА в давление воздуха 20-100 кПа. Принципиальная схема преобразователя приведена на рис. 9.5, б. Входной сигнал Iв вводят в катушку (К), в которой расположен постоянный магнит М, притягивающий с определенной силой, пропорциональной Iв, рычаг . Это ведет к изменению расстояния между соплом и заслонкой в ПС и давлений на входе Р1 и выходе Р усилителя мощности. Одновременно изменяется давление в сильфоне С, включенном в контур отрицательной обратной связи, что приводит к восстановлению равновесия рычажного сумматора . Настройку преобразователя производят винтом Н, изменяющим расстояние от оси сильфона до оси вращения , а также шунтом постоянного магнита.
Для преобразования рода энергии дискретных сигналов применяют пневмоэлектрические преобразователи типов ППЭД-1, ППЭД-2 (сконструированные на базе одномембранных элементов микропереключателей и магнитоуправляемых герметичных контактов - герконов) и электропневматические преобразователи П1ПР.5 и ПЭПД (построенные на основе переменного ПС сопло - заслонка 2 и электромагнита 1). Выходами (входами) этих преобразователей служат сигналы уровня 0 или 24 В постоянного тока. Схемы преобразователей ППЭД.1 и П1ПР.5 приведены на рис. 9.5, в, г.
Пневматические регуляторы и приборы. Автоматическая система регулирования ТОУ, построенная на ПСА, состоит в общем случае (рис. 9.6) из датчика (Д), вторичного прибора (ВП), задатчика (ЗД), пневматического регулятора (ПР), линии связи (ЛС), исполнительного механизма (ИМ) и регулирующего органа (РО). Датчик Д вырабатывает унифицированный пневматический сигнал, пропорциональный значениям координаты у ТОУ; при использовании в АСР датчика с электрическим выходом необходима установка дополнительного электропневмопреобразователя (ЭПП). Пневматический сигнал от Д вводят в регулятор ПР и одновременно - во вторичный показывающий (и регистрирующий) прибор, ВП, снабженный станцией управления СУ для задания автоматического, программного или ручного дистанционного режима работы системы регулирования. Регулятор ПР в соответствии с одним из типовых законов регулирования вырабатывает командный сигнал, поступающий по линии связи (пневмопроводу длиной до 250- 300 м) на пневматический мембранный исполнительный механизм.
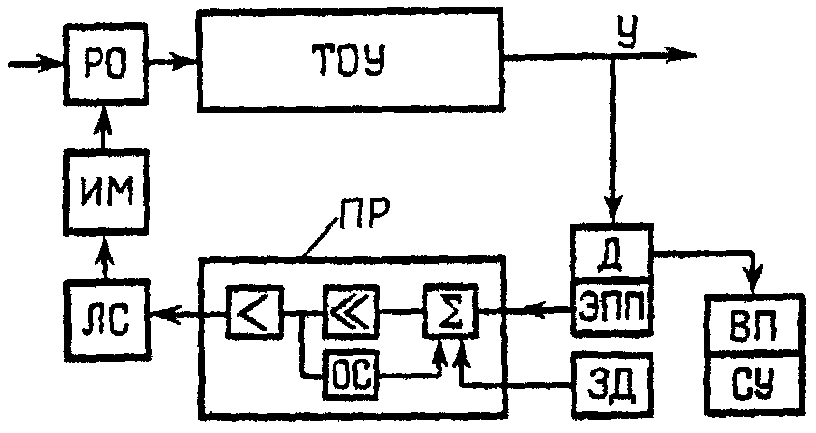
Рис. 9.6. Структурная схема пневматической АСР
В динамическом отношении мембранные ИМ в области частот [0, 0,3] рад/с рассматривают как последовательное соединение апериодического звена с малой (порядка нескольких секунд) постоянной времени и усилителя с зоной гистерезиса 2-10%. При длине пневмолинии более 100-150 м ИМ оборудуют усилителями мощности и охватывают жесткой отрицательной обратной связью по перемещению РО. При использовании таких позиционеров ИМ принимают за линейное усилительное звено, не влияющее на динамические характеристики пневматического регулятора и всей АСР.
Пневматические регуляторы. Применяемые в ПСА регуляторы имеют одинаковую функциональную структуру (рис. 9.6): сумматор для сравнения сигналов от датчика Д, устройства обратной связи ОС и задатчика ЗД; усилитель давления с большим коэффициентом передачи Ку; оконечный усилитель мощности и ОС с передаточной функцией W0(p). При Ку>>1 динамику линеаризованного в малом регулятора приближенно описывают передаточной функцией W0-1(p) что позволяет формировать нужный закон всей АСР подбором инверсных характеристик устройства обратной связи.
Для автоматизации химических производств в основном применяют пневматические регуляторы системы «Старт», построенные на элементах УСЭППА и частично КЭМП. Эти регуляторы построены по принципу компенсации сил, что обеспечивает высокую точность (статическая погрешность 0,51,0%) реализации позиционного, П-, ПИ-, ПД- и ПИД-законов регулирования и возможность установки ПР непосредственно на ТОУ, на щите управления или на вторичном приборе.
Регулятор типа ПР3.31 предназначен для осуществления ПИ-закона
![]() ,
,
где - предел пропорциональности; Tи-время интегрирования (изодрома). Регулятор (рис. 9.7) условно разделяют на интегральный, пропорциональный и усилительный узлы. Интегральная составляющая ПИ-закона вырабатывается мембранным сумматором и глухой камерой V, охваченными положительной обратной связью ПОС, которая вводится в камеру Б сумматора. Входной сигнал P1P3=Р проходит через переключатель П, сумматор , выключающее реле ВР, и на выходе интегрального узла Ри(p)=P(p)/(Tиp), где Ти- постоянная времени глухой камеры.
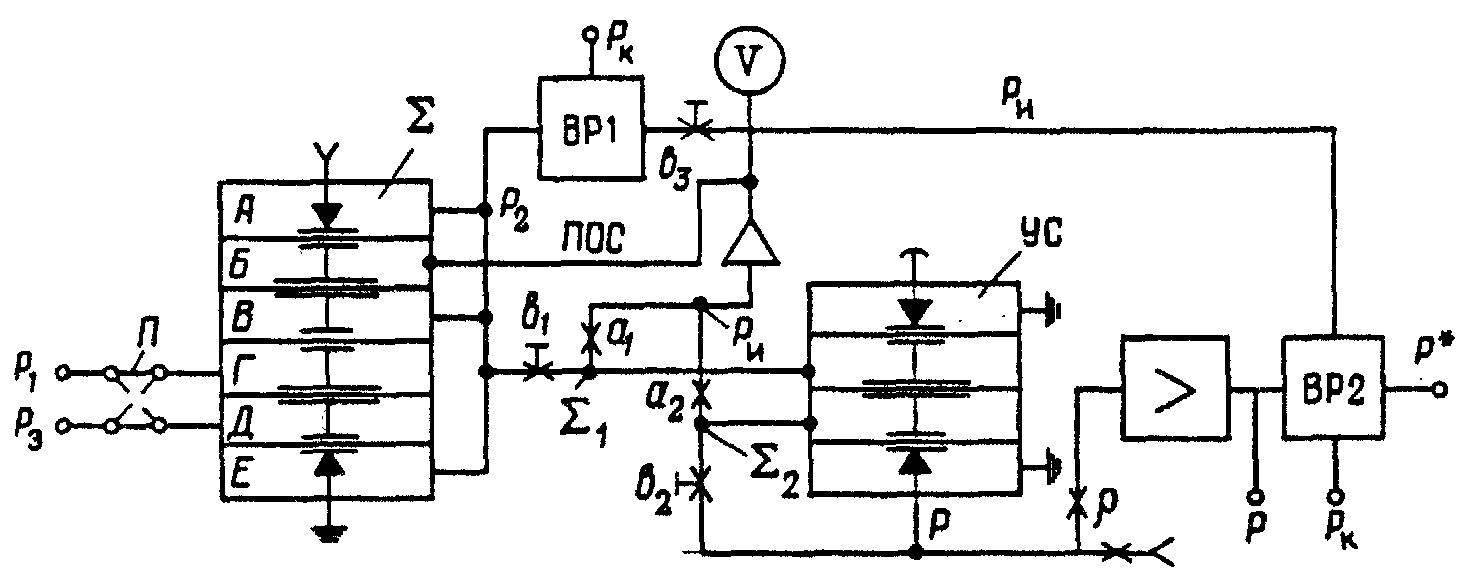
Рис. 9.7. Схема ПИ-регулятора типа ПР3.31
Сигнал Pи через повторитель вводят в пропорциональный узел, образованный линейными дроссельными делителями 1, 2 и усилителем давления УС. Из условия равновесия сил на сумматоре УС определяется выходное давление
Р=(Р2-Ри)k1/k2+Pи ,
где kj=bj/(aj+bj), j=1, 2; a1, a2, b1, b2 - проводимости ПС сумматоров 1, 2 . Сигнал
Р2(p)=Р(p)+Р(p)/(Tир),
поэтому
Р(p)=Р(p)k1/k2+Р(p)/(Tир),
и передаточная функция регулятора ПР3.31 принимает вид:
W(p)=Р(p)/Р(p)=k1/k2+1/(Tир)=1/+1/(Tир),
где =k2/k1. Настройку параметра в интервале от 2 до 100% осуществляют проводимостью b2 (при установке b1 на отметку 100% и k11). При b1=0 коэффициент k20, и предел пропорциональности 0. Если регулируемый дроссель открыт и b2>>а2, то k2=1, и 100%.
Настройку параметра в интервале 100-3000% осуществляют проводимостью b1 регулируемого ПС (при открытом дросселе с проводимостью b2). Время Tи изменяют независимо от регулируемым дросселем b3 глухой камеры в интервале 36000 с.
Узел усиления содержит точный мощный повторитель типа П2П.7, на входе которого установлен дроссель для демпфирования автоколебаний в усилителе расхода. Выключающие реле ВР1, ВР2 по команде Pк=1 отключают глухую камеру V и регулятор от ИМ. Одновременно с этим линия ИМ соединяется с камерами V и Б сумматора , что позволяет осуществлять "безударное" включение регулятора в работу при переводе с ручного режима на автоматический.
Динамику регулятора ПР3.31 характеризуют в малом передаточной функцией:
W(p)=[1/+1/(Tир)]Wп(p),
где Wп(p)=(1+C1p+C2p)/[(Tир+)(1+C3p+C4p2)], параметры С1С4 зависят от значений k1, k2 и . При 10<<3000% и <0,3 рад/с функция Wп(p) несущественно отличается от 1, и блок ПР3.31 рассматривают как ПИ-регулятор.
Пневматические вторичные приборы. Эти приборы предназначены для показания и регистрации сигнала Р, а также сигнализации об его отклонениях за диапазон заданных изменений. Все вторичные приборы имеют одинаковую функциональную структуру измерительного узла: преобразователь сигнала Р в усилие (чаще всего сильфон); рычажный сумматор сил; преобразователь малых перемещений в давление воздуха Р0; исполнительный механизм (преобразователь давления Р0 в большие перемещения стрелки прибора); устройство отрицательной обратной связи (пружина). В зависимости от типа прибора в его состав дополнительно входит лентопротяжный механизм с редуктором и двигателем, станция управления режимами работы АСП, устройства сигнализации.
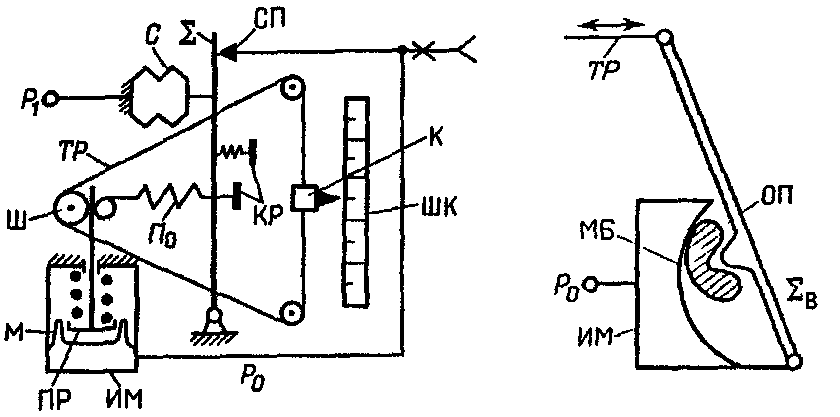
Вторичные приборы типа ПКП предназначены для показания с погрешностью ±0,5 или ±1,0% одного (ПКП.1) или двух (ПКП.2) сигналов. В соответствии с этим прибор имеет один или два однотипных измерительных узла (рис. 9.8, а) и две шкалы. Измеряемое давление Р1 вводят в сильфон С, усилие от которого передается на рычажный сумматор . При вариациях давления Р1 рычаг перемещается и изменяет расстояние до сопла (СП) и давление воздуха Р0, вводимого в камеру исполнительного механизма (ИМ), что приводит к перемещениям поршня (ПР) с мягкой уплотнительной манжетой (М). Поступательное движение поршня преобразуется во вращение вала, на шкиве (Ш) которого закреплен тросик (ТР), перемещающий каретку (К) со стрелкой относительно линейной (или квадратической) шкалы (ШК). Одновременно изменяется натяжение пружины обратной связи П0, что ведет к уравновешиванию моментов сил, действующих на рычаг . Для настройки нуля и диапазона шкалы прибора служат корректоры КР.
а б
Рис. 9.8. Вторичные пневматические приборы:
а – измерительная схема прибора ПКП;
б – исполнительный механизм прибора ПВ
Модификации приборов ПКП.1П и ПКП.1Э обеспечивают кроме показания пневматическую и электрическую сигнализацию достижения давлением Р1 заданных значений Р, Р+.Для этого в приборе ПКП.1 устанавливают 2 фиксатора диапазона [Р, Р+], представляющие собой ПС типа «сопло-заслонка», и два пневмоклапана КЛАМП или дискретный пневмоэлектропреобразователь ППЭД.2 (либо не выпускаемый серийно П1ПР.4). При Р1=Р или Р+ каретка прибора открывает сопло фиксатора, и давление воздуха на входе клапана или преобразователя становится равным нулю, вследствие чего на выходе КЛАМП (или ППЭД.2) появляется усиленный пневматический (или электрический) командный сигнал.
Вторичные приборы типа ПВ функционально устроены аналогично приборам ПКП и отличаются от них только исполнительным механизмом (рис. 9.8,б). При изменении давления Р0 после сопла СП и в камере ИМ упругая чашечная мембрана (МБ) перемещает опору (ОП), которая поворачивает вспомогательный рычаг в около оси, что вызывает перемещение тросика ТР с закрепленной на нем кареткой со стрелкой и пером и пружины обратной связи.