

Вопросы для самопроверки
1. Как классифицируются технические средства автоматизации по виду используемой энергии?
2. Что называется электрическим сервомеханизмом?
3. Какие преимущества имеют пневматические и гидравлические исполнительные устройства?
4. Что относится к основным техническим параметрам микропроцессоров?
5. Чем характеризуется поточная форма организации технологических процессов?
6. Какие средства автоматизации целесообразно использовать в мелкосерийном и единичном производствах для обработки большой номенклатуры часто сменяемых деталей?
7. Каковы функции управляющего автомата?
8. Что входит в технические средства системы управления?
9. Какие уровни имеет схема управления производством?
10. Как выглядит обобщенная схема системы контроля и управления технологическими процессами?
Должен знать: разновидности, принципы действия и характеристики исполнительных устройств циклических производств.
Должен уметь: различать разные формы организации технологических производств, строить концепции систем управления в зависимости от специфики производства.
Тема 14. Основные понятия робототехники
Литература: [7], п.п. 1, 3
Робот представляет собой многофункциональное механическое устройство с изменяемой программой функционирования, способное перепрограммироваться на различные действия. От других механических устройств он отличается совокупностью двух свойств:
универсальная механическая база;
перепрограммируемая система управления приводами перемещений.
Универсальной механической базой робота может быть манипулятор, представляющий собой разомкнутую последовательность звеньев, начало которой закреплено на основании, а конец перемещается в пространстве (рис. 14.1). В соединениях звеньев имеются приводы для поступательного или вращательного перемещений звеньев друг относительно друга.
|
Рис. 14.1. Манипулятор |
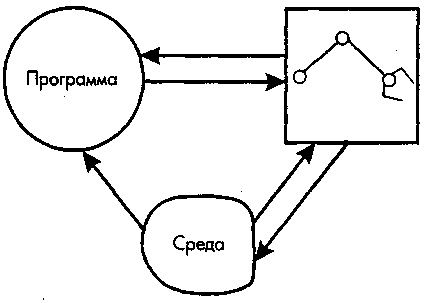
Рис. 14.2. Схема работы робота |
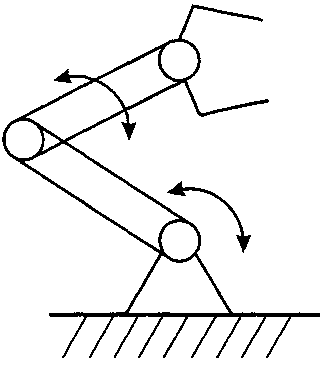
При взаимных перемещениях звеньев свободный конец манипулятора с закрепленным на нем рабочим органом выводится в разные точки пространства. Рабочий орган манипуляционного робота представляет собой захватное устройство или инструмент для непосредственного выполнения технологических операций. У транспортных роботов рабочим органом является грузонесущая платформа, у информационных роботов устройство получения информации. При решении разных задач можно изменять перемещения рабочего органа в пространстве, изменяя программу в системе управления.
Специалисты решили не вводить стандартное определение понятия «робот», чтобы не ограничивать появление новых форм робототехники. Международная организация по стандартизации предлагает следующее: позиционно-управляемый, перепрограммируемый, многофункциональный манипулятор с несколькими степенями подвижности, способный перемещать материалы, детали, инструмент и предназначенный для выполнения разнообразных задач в процессе осуществления различных программируемых движений.
Манипуляторы с управлением от человека не относятся к роботам, даже если управление ведется на расстоянии. С пятидесятых годов они применяются для "безопасной работы с радиоактивными материалами и других неповторяющихся операций в недоступной для человека среде. Манипулятор состоит из исполнительной механической руки, помещенной в опасную зону и задающей механической руки, на которую воздействует оператор, находящийся в безопасной зоне. В первых конструкциях задающая и исполнительная руки были связаны тросами и лентами так, чтобы движения задающей руки копировались движениями исполнительной руки. В дальнейшем механическая связь задающей и исполнительной рук была заменена электрической связью, позволившей уменьшить нагрузку на оператора, повысить грузоподъемность манипулятора, ввести управление вне прямой видимости.
К роботам не может быть отнесен автооператор, представляющий собой автоматически действующий манипулятор без перепрограммирования движений. Повторение циклов управления осуществляется аппаратным устройством управления. Переналадка автооператора на другую операцию трудно осуществима, так как требуется изменение длины звеньев манипулятора и замена устройства управления. Обычно автооператоры входят в состав конкретного оборудования.
Средой функционирования робота является технологическое оборудование, условия работы и порядок выполнения рабочих операций. В зависимости от состояния среды изменяется программа управления приводами робота и его воздействие на среду (рис. 14.2).
С другой стороны, на механическую базу робота воздействует среда. Это может быть изменение сопротивления перемещению звеньев. Информация об изменении механической базы вводится в систему управления с целью корректировки программы управления.
Сложность кинематической цепи манипулятора характеризуют числом степеней подвижности, в которое обычно не включают степень подвижности захватного устройства.
Число степеней подвижности равно числу независимых перемещений звеньев кинематической цепи относительно неподвижного основания [4]. Звено манипулятора может осуществлять качание, поворот или возвратно-поступательное перемещение относительно смежного звена. Каждое перемещение характеризуется границами, временем перемещения, максимальными скоростью и ускорением перемещения, погрешностью позиционирования, числом программируемых точек на траектории перемещения звена, погрешностью отработки траектории.
Погрешность позиционирования максимальное отклонение рабочего органа от заданной точки при повторении циклов перемещения (рис. 14.3). Для роботов с электроприводом погрешность позиционирования составляет 0,10,5 мм.
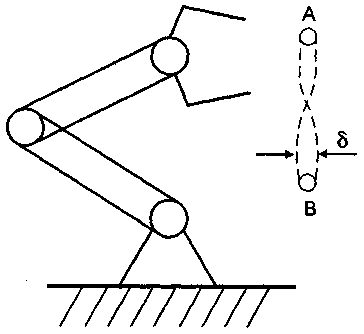
Погрешность отработки траектории это максимальное отклонение фактической траектории перемещения рабочего органа между точками А и В от траектории, заданной программой управления (рис. 14.4).
Рабочая зона это пространство, в котором может находиться рабочий орган манипулятора или робота. Она зависит от размеров звеньев, их перемещений и кинематической схемы манипулятора. Рабочая зона задается в описании манипулятора. Погрешность позиционирования или отработки траектории увеличивается при увеличении грузоподъемности и рабочей зоны робота. Так, робот грузоподъемностью 4,5 кг с удалением рабочего органа до 0,5 м имеет погрешность позиционирования около 0,5 мм. Увеличение грузоподъемности или рабочей зоны манипулятора без повышения погрешности позиционирования рабочего органа является сложной задачей.
|
Рис. 14.3. Погрешность позиционирования |
Рис. 14.4. Погрешность отработки траектории рабочим органом манипулятора |
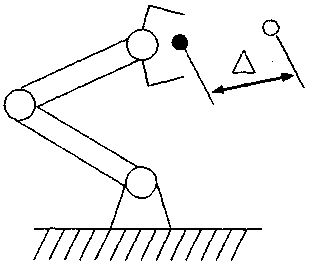
Зона обслуживания представляет собой часть рабочей зоны, в которой робот выполняет технологические операции. Она определяется условиями применения робота. На рис. 14.5 заштрихована зона обслуживания манипуляционного робота при сборке изделия.
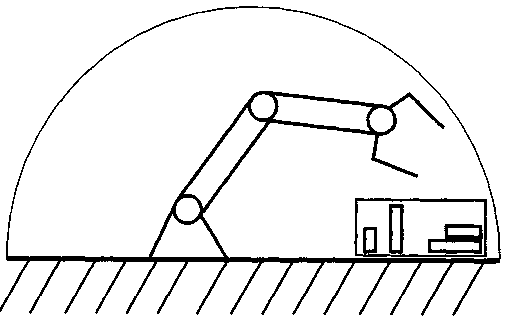
Рис. 14.5. Зона обслуживания в рабочей зоне робота
Захватное устройство характеризуется усилием захватывания, временем захватывания, временем отпускания, максимальным и минимальным размерами объекта манипулирования.
Различают три поколения роботов: программные, адаптивные и интеллектуальные (табл. 14.1). Применение робота того или иного поколения в технологическом процессе определяется не столько развитием робототехники, сколько влиянием среды функционирования на процесс.
Программные роботы не имеют датчиков, поэтому работают при фиксированном состоянии среды. Адаптивные роботы применяют в тех случаях, когда можно перечислить возможные состояния среды и для каждого состояния задать программу управления роботом.
В систему управления закладывают набор алгоритмов управления и, в зависимости от состояния среды, выбирают тот или иной алгоритм управления. Интеллектные роботы в процессе своего функционирования формируют модель среды, для которой вырабатывают план действий. Для этого применяются сложные алгоритмы классификации неизвестных ситуаций и выбора последовательности действий. Проблема технической имитации интеллектуальных свойств человека исключительно сложна. Поэтому применение интеллектуальных роботов может быть оправдано в тех случаях, когда невозможно предусмотреть изменения среды, например на других планетах. Даже в будущем роботы вряд ли смогут выполнять такие ориентированные на интеллектуальные свойства человека работы, как починка мебели и одежды, езда на велосипеде, сортировка рукописей, приготовление еды. Недоступны для роботов будут и творческие работы сочинение музыки и литературных произведений, исполнение музыки, декламация.
Таблица 14.1