

Вопросы для самопроверки
Дайте классификацию автоматических регуляторов.
Назовите типовые законы регулирования.
Что такое параметр настройки автоматического регулятора?
Как влияют параметры настройки на качество регулирования?
Чем отличаются позиционные регуляторы от аналоговых?
Какие позиционные регуляторы Вам известны?
Поясните типовые структурные схемы электрических регуляторов с обратной связью.
Как влияет нестабильность характеристик исполнительных механизмов на качество регулирования при различных структурах регуляторов?
Каким недостатком обладают регуляторы без обратной связи?
Поясните характеристики двухпозиционных регуляторов.
Должен знать: классификацию автоматических регуляторов, основные законы регулирования, структуры регуляторов, методы расчета двухпозиционных регуляторов, их оптимальных настроек.
Должен уметь: различать регуляторы по группам, рассчитывать характеристики двухпозиционного регулирования, оптимальные настройки при различных параметрах объектов и переходных процессах.
Тема 3. Устройства ввода и вывода регуляторов
Литература: [6], п.п. 3; [15], п.п. 5.1-5.7;
Автоматические системы регулирования (АСР) в общем случае могут содержать в своем составе датчики (первичные преобразователи), барьеры искровой защиты, нормирующие преобразователи, преобразователи непрерывного сигнала в цифровой код и преобразователи кода в аналоговый сигнал. Данные преобразователи (часто являющиеся микропроцессорными) входят в состав устройств сопряжения регуляторов с объектом управления (УСО), так как предназначены для согласования объекта со средством обработки и представления информации и технически оформляются как модули ввода и вывода аналоговой или дискретной информации.
Барьеры искровой защиты. Барьеры искрозащиты применяются для сопряжения электрооборудования, расположенного во взрывоопасной зоне, с электрооборудованием, установленным во взрывобезопасной зоне, и служат в качестве разделительных элементов между искробезопасными и искроопасными цепями. Искрозащита достигается использованием электрических цепей, исключающих появление напряжений или токов, при которых возможен искровой разряд, например, включая нелинейный элемент - стабилитрон.
Разновидностью таких устройств являются барьеры для защиты электрооборудования, подключенного к измерительным и управляющим цепям, от бросков тока, наведенных в результате разрядов молний. Защитные устройства могут быть установлены в диспетчерской или непосредственно в месте размещения оборудования. Обеспечивается защита от всплесков напряжения между каждым сигнальным проводом и корпусом устройства (несимметричное напряжение) и между проводниками (симметричное напряжение).
Также имеются барьеры искробезопасности с гальваническим разделением цепей.
Нормирующие преобразователи. Основными функциями нормирующих преобразователей (НП) или нормализаторов являются приведение границ параметров первичного сигнала датчика к одному из стандартных диапазонов (табл. 1), принятому для входного сигнала измерительного средства (аналого-цифровой преобразователь и т.д.), и согласование стандартного диапазона выходного сигнала управляющего элемента с видом (ток/напряжение) и диапазоном входного сигнала исполнительного устройства. Дополнительными функциями устройств нормализации, как правило, являются предварительная фильтрация первичных сигналов, а также обеспечение надежной гальванической развязки между первичными измерительными или исполнительными цепями и соответствующими цепями контроля или управления более высокого уровня.
Таблица 3.1
Стандартные диапазоны входных величин приемников информации
|
Сигнал напряжения, В |
Нагрузочное сопротивление, Ом, не более |
Входное сопротивление приемника Oм, не менее |
|
От 0 до 0, 01 включит |
– |
10000 |
|
От 0 до 1 включит. |
– |
10000 |
|
От 0 до 10 включит. 2000 |
2000 |
– |
|
Сигнал тока, мА |
Выходное сопротивление источника, Ом, не менее |
Входное сопротивление приемника Oм, не более |
|
От 0 до 5 включит |
2500 (2000) |
500 |
|
От 0 до 20 включит. |
1000 (500) |
250 |
|
От 4 до 20 включит. |
1000 (500) |
250 |
Современные интеллектуальные датчики – это высокоинтегрированные устройства, в которых объединены функции приёма, фильтрации, нормализации, хранения, преобразования в цифровую форму, вычислительной обработки и передачи по одному из множества используемых в промышленности последовательных интерфейсов величины физического параметра (температуры, давления, уровня жидкости, давления, концентрации и т.д.). Кроме того, эти устройства могут проводить периодическую автокалибровку с внесением соответствующих поправок во флэш-память и корректировать дальнейшие результаты измерений с учетом возможной погрешности. Учитывая возросшие возможности современных датчиков, может показаться, что такие устройства, как нормализаторы, исчерпали себя. Тем не менее, данные устройства пользуются широким спросом, по следующим причинам. Во-первых, использование нормализаторов при модернизации производств с существующим парком датчиков, не имеющих унифицированных выходных сигналов экономически целесообразно. Во-вторых, часто внешний элемент нормализации является более эффективным по сравнению со встраиваемой аппаратурой.
Среди стандартных сигналов наиболее удобным и популярным является токовый сигнал 420 мА. Причины этого в следующем.
Сигналы первичных преобразователей, как правило, очень малы. Например, сигналы термопар обычно меньше 50 мВ. В промышленных условиях сильные электромагнитные помехи могут создавать паразитные сигналы, в сотни и тысячи раз превышающие полезные. Сильные токовые сигналы уровня 420 мА работают в низкоомных цепях, которые меньше подвержены такому влиянию. Требования к величине их сопротивления могут быть снижены. При работе с токовым сигналом 420 мА легко обнаружить обрыв линии связи – ток будет равен нулю (т.е. выходить за пределы диапазона). В то же время, обрыв в цепи с сигналом 05 мА обнаружить нельзя, так как ток, равный нулю, считается допустимым. Для обнаружения обрыва в цепях с унифицированными сигналами напряжения (01В или 010В) приходится применять специальные схемотехнические решения, на пример, «подтяжку» более высоким напряжением через высокоомный резистор.
Нормирующий преобразователь, который формирует токовый сигнал 420 мА, является так называемым генератором тока – источником стабильного тока с очень большим выходным сопротивлением (рис. 3.1): r>>Rш, Rпр, где r – дифференциальное выходное сопротивления нормирующего преобразователя, Rш, Rпр – соответственно сопротивления шунта в измерительном приборе и соединительных проводов.
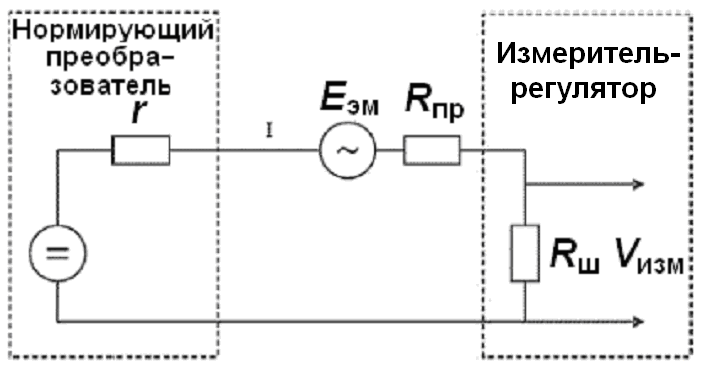
Рис. 3.1. Соединение измерителя-регулятора
к нормирующему преобразователю
Выпускается ряд модификаций регуляторов, рассчитанных на работу со стандартизированными сигналами тока и напряжения. Следует учитывать, что в этих приборах измеряемый ток должен втекать в прибор, а измеряемое напряжение должно быть положительным относительно общей точки. В многоканальных приборах все входы имеют одну общую точку, поэтому неизолированы друг от друга.
Поскольку величина тока I не зависит от сопротивления нагрузки, а Vизм = IRш, то сопротивление проводов не влияет на результат измерения. Для оценки можно принять, что дополнительная относительная погрешность, связанная с влиянием сопротивления нагрузки (Rпр + Rш), равна
δ= (Rпр + Rш)/(r + Rпр + Rш) (Rпр + Rш)/r. (3.1)
Для характерных значений r = 1 МОм, Rпр = 500 Ом, Rш =50 Ом, имеем δ < 0,06%.
С другой стороны, в такой высокоомной цепи источник электромагнитных помех Eэм не в состоянии создать сколько-нибудь заметное по сравнению с полезным сигналом Vизм напряжение на низкоомном шунте Rш. Напряжение помехи, измеренное прибором, будет равно:
Vп = Eэм(Rш/r).
При Eэм = 1 В, напряжение помехи будет составлять Vп = 50 мкВ. Полезный сигнал при I = 20 мА имеет величину 1 В. Таким образом, отношение помехи к полезному сигналу имеет порядок 104, а величина (r/Rш) показывает степень подавления электромагнитных помех.
Нетрудно показать, что при работе с сигналами напряжения сигнал помехи Vп практически равен Eэм. Это демонстрирует преимущество токовых сигналов при работе в условиях сильных электромагнитных помех по сравнению с сигналами напряжения.
Гальваническое разделение цепей. Гальваническое разделение цепей (гальваническая развязка) преследует цель защиты входных цепей УСО от помех. Под этим термином подразумевают семейство технических способов обеспечения изоляции между частями системы, которая обеспечивает непроводимость гальванического барьера для земельных и питающих сквозных токов и проводимость для информационного сигнала фактически это устройство отделения информационного сигнала от среды, по которой он пришел.
В сложной системе управления с разветвленными каналами связи имеется опасность появления ложного заземления линии, причем земля может появиться на нескольких участках цепи одновременно. Для повышения живучести системы по отношению к подобным нарушениям предусматривается гальваническая изоляция входных и выходных цепей приборов относительно цепи питания, а во многих блоках – также между входными и выходными цепями.
Гальваническая изоляция цепей особенно необходима для обеспечения возможности последовательного соединения нескольких потребителей или источников сигнала, каждый из которых может иметь свою точку заземления.
Гальваническое разделение цепей постоянного тока осуществляется с помощью модуляции-демодуляции с разделительным трансформатором и применением оптоэлектронных преобразователей. По первой схеме модуляторе сигнал постоянного тока превращается в последовательность импульсов с использованием амплитудно-импульсной или широтно-импульсной модуляции. Далее импульсный сигнал проходит через разделительный трансформатор, обеспечивающий собственно гальваническое разделение входных и выходных цепей. В демодуляторе производится фазочувствительное выпрямление сигнала, а с помощью сглаживающего фильтра выделяется постоянная составляющая выпрямленного сигнала.
Часто нормализаторы и устройства гальванической развязки совмещают в одном модуле (рис. 3.2).
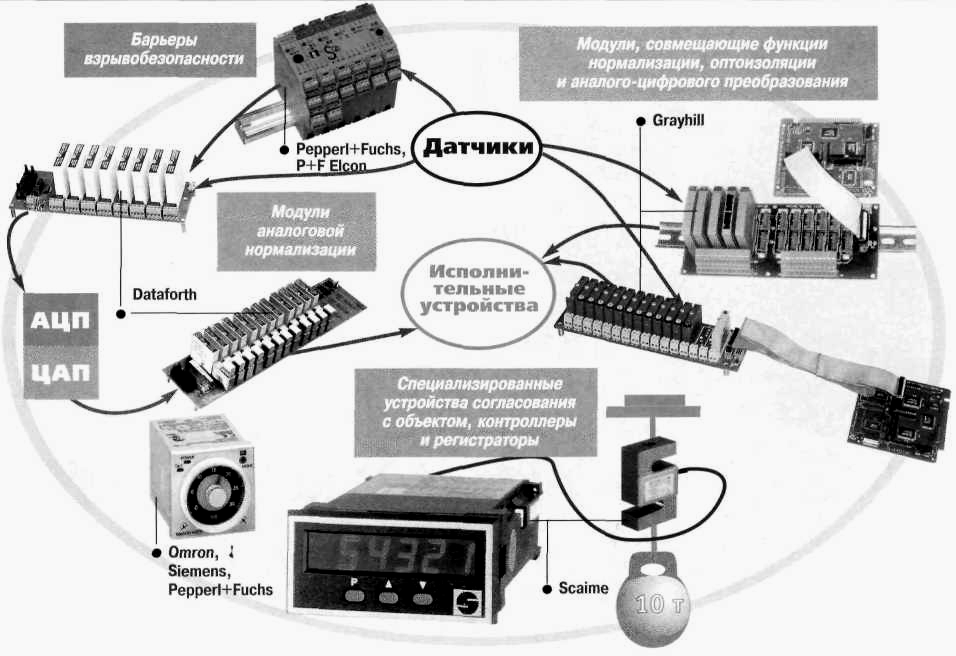
Рис. 3.2. Модули гальванической развязки и нормализации сигналов
Распределение унифицированных токовых сигналов с защитой цепи от разрыва. В распределенных системах с токовым выходным сигналом связи все потребители включаются последовательно, поэтому обрыв линии связи или отключение одного из потребителей приводит к тому, что одновременно прекращается поступление информационного сигнала ко всем остальным потребителям. Для того, чтобы сохранить протекание тока в цепи, параллельно зажимам потребителей на распределительной колодке подключается сигнальное защитное устройство (рис. 3.3, а), представляющее собой стабилитрон с нелинейной вольт-амперной характеристикой, отличающейся наличием порогового напряжения включения.

Рис. 3.3. Использование стабилитронов для защиты токовой цепи от разрыва:
а – схема включения;
б – вольт-амперная характеристика защитного устройства
В нормальном режиме падение напряжения Uн = IнRн на сопротивлении нагрузки Rн, создаваемое током Iн источника сигнала, меньше порогового напряжения Uп стабилитрон закрыт и ток через него практически равен нулю (точка В на вольт-амперной характеристике). При обрыве линии связи одного из потребителей (в точке А на рис. 3.3, б) напряжение на нагрузке скачком возрастает (так как источник сигнала стремится поддержать силу тока в цепи), стабилитрон открывается и в цепи сохраняется прежнее значение силы тока. Напряжение на зажимах потребителя становится равным Uп (точка С на вольт-амперной характеристике), а на зажимах источника напряжение возрастает на величину U = Uп - IнRн (предполагается, что источник сигнала, имеет соответствующий запас по напряжению).
Защита от дребезга контактов дискретных датчиков. Если применяют контактные датчики бинарного типа (0 отключено, 1 - включено), называемые часто «сухой контакт», то возникает проблема дребезга контактов - кратковременного отскакивания контактов друг от друга при срабатывании датчика, что достаточно для перехода микропроцессорной системы цифрового регулятора в непредусмотренное состояние. Защита возможна аппаратным способом, с помощью RC - инерционных элементов или программно – включением специальной программы в работу порта ввода микропроцессорной системы регулятора.
Аналого-цифровые преобразователи. Цифровые приборы могут работать с дискретными сигналами, состоящими из нулей и единиц, в то время как многие информационные устройства выдают аналоговые сигналы. Процесс преобразования непрерывного аналогового сигнала в цифровую форму называют аналого-цифровым преобразованием, а сам прибор, осуществляющее такое преобразование, аналого-цифровым преобразователем (АЦП). Такое преобразование состоит из двух процессов:
квантования по уровню;
квантования (дискретизации) по времени.
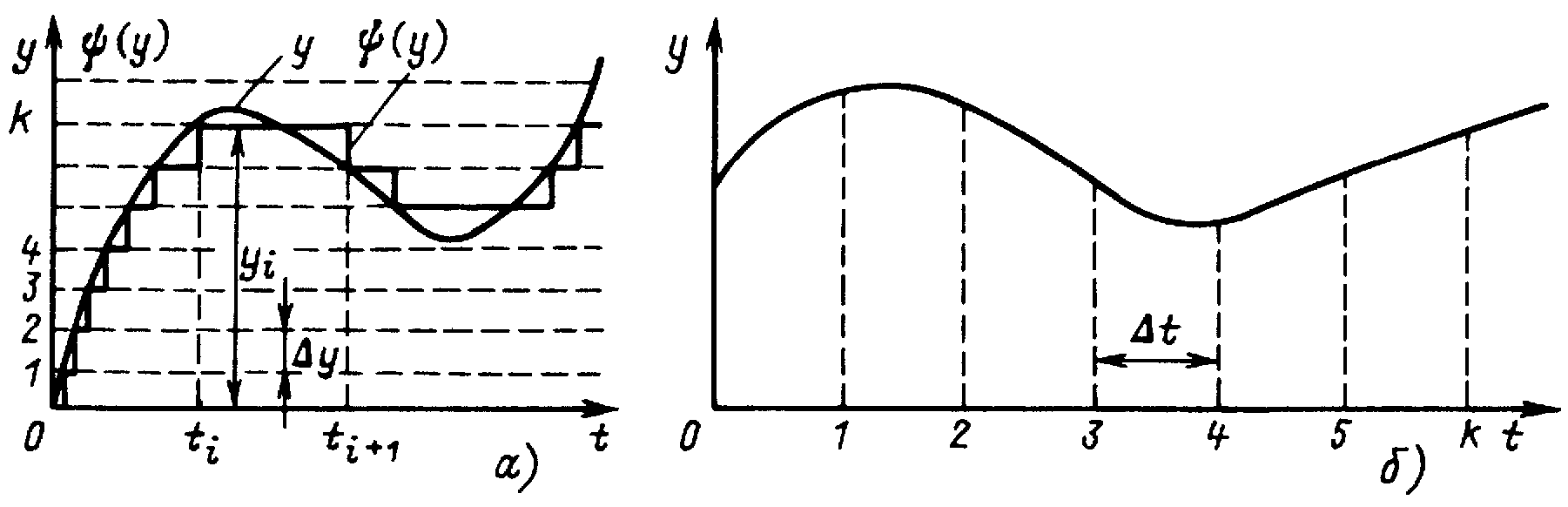
Рис. 3.4. Квантование сигналов по уровню (а) и времени (б)
Квантование сигналов по уровню сводится к замене текущих значений непрерывного сигнала конечным числом его уровней. На рис. 3.4, а показан непрерывный сигнал y(t), который в результате квантования заменяется ступенчатой функцией (у). Разность уровней у(t) называется шагом квантования по уровню. Если в интервале изменения времени от ti до ti+1 приращение сигнала не выходит за пределы шага квантования в одну или другую сторону, то прибор фиксирует постоянное значение yi. Таким образом, такое преобразование является нелинейным, так как выходной сигнал изменяется ступенчато. Шаг квантования определяется требуемой допустимой относительной погрешности измерения :
у(t) [уmaxуmin], (3.2)
где уmax, уmin соответственно максимальный и минимальный уровни сигнала.
Преобразование квантованной (дискретной) информации в двоичную форму сводится к масштабированию и округлению до ближайшего целого числа в диапазоне чисел, определяемом разрядностью выходного двоичного кода АЦП. Формула масштабирования и округления запишется следующим образом:
![]()
![]() ,
(3.3)
,
(3.3)
где Сi - выходной двоичный код АЦП;
n – разрядность АЦП;
yi – текущее значение измеряемой величины;
![]() -
операция выделения целой части числа.
-
операция выделения целой части числа.
Для АЦП с п двоичными разрядами цифрового выходного кода число уровней т:
m=2n-1. (3.4)
Пример 3.1. АЦП с линейной характеристикой, имеющий входной токовый предел измерения 05 мА, вырабатывает 8-разрядный двоичный код. Диапазон чисел, которые могут быть представлены в разрядной сетке преобразователя с учетом «нуля» 0(28 – 1)= 0 255. Если текущее значение входного сигнала равно 0,41 мА, то выходной код АЦП
![]() .
(3.5)
.
(3.5)
Квантование непрерывного сигнала y(t) по времени (рис. 3.4, б) сводится к замене большого числа значений непрерывного сигнала конечным числом мгновенных значений, фиксируемых через определенный промежуток времени t. Последний называется шагом или периодом квантования по времени (дискретизации) и может быть постоянным или переменным. При этом возникает опасность пропуска важных изменений сигнала внутри промежутка t или возникновения избыточного количества информации при чересчур малом t.
В этом случае частота квантования определяется на основании теоремы Котельникова-Шеннона (1933г.). В теореме рассматривается непрерывная функция, не ограниченная по времени, т.е. имеющая ограниченный спектр частот. Любую функцию, содержащую частоты от 0 до fmax, можно передавать с любой точностью при помощи чисел, следующих друг за другом через интервалы времени
t = 1/2fmax. (3.6)
Таким образом, непрерывный сигнал, не содержащий частот выше fmax, может быть заменен на интервале времени Т набором 2Тfmax (отсчитанных через промежутки времени t = 1/2fmax) дискретных значений сигнала без потери информации между этими значениями. Например, переменное напряжение частотой 50 Гц может быть заменено дискретными значениями напряжения через 0,01 с.
Аналого-цифровым преобразователем (АЦП) называют устройство, преобразующее входную аналоговую величину в соответствующий ей цифровой эквивалент-код, являющийся выходным сигналом преобразователя. АЦП обеспечивает как дискретизацию непрерывного сигнала по времени, так и его квантование по уровню.
Существуют различные подходы к классификации АЦП: по структуре построения, по алгоритму работы, по виду аналоговой величины, подвергаемой кодированию, и др. Наиболее распространенной является классификация, по которой преобразователи подразделяются на две группы:
АЦП прямого преобразования или разомкнутые преобразователи, где отсутствует общая обратная связь с выхода на вход;
АЦП уравновешивающего или компенсационного преобразования с общей отрицательной обратной связью с выхода на вход, содержащей цифроаналоговый преобразователь (ЦАП).
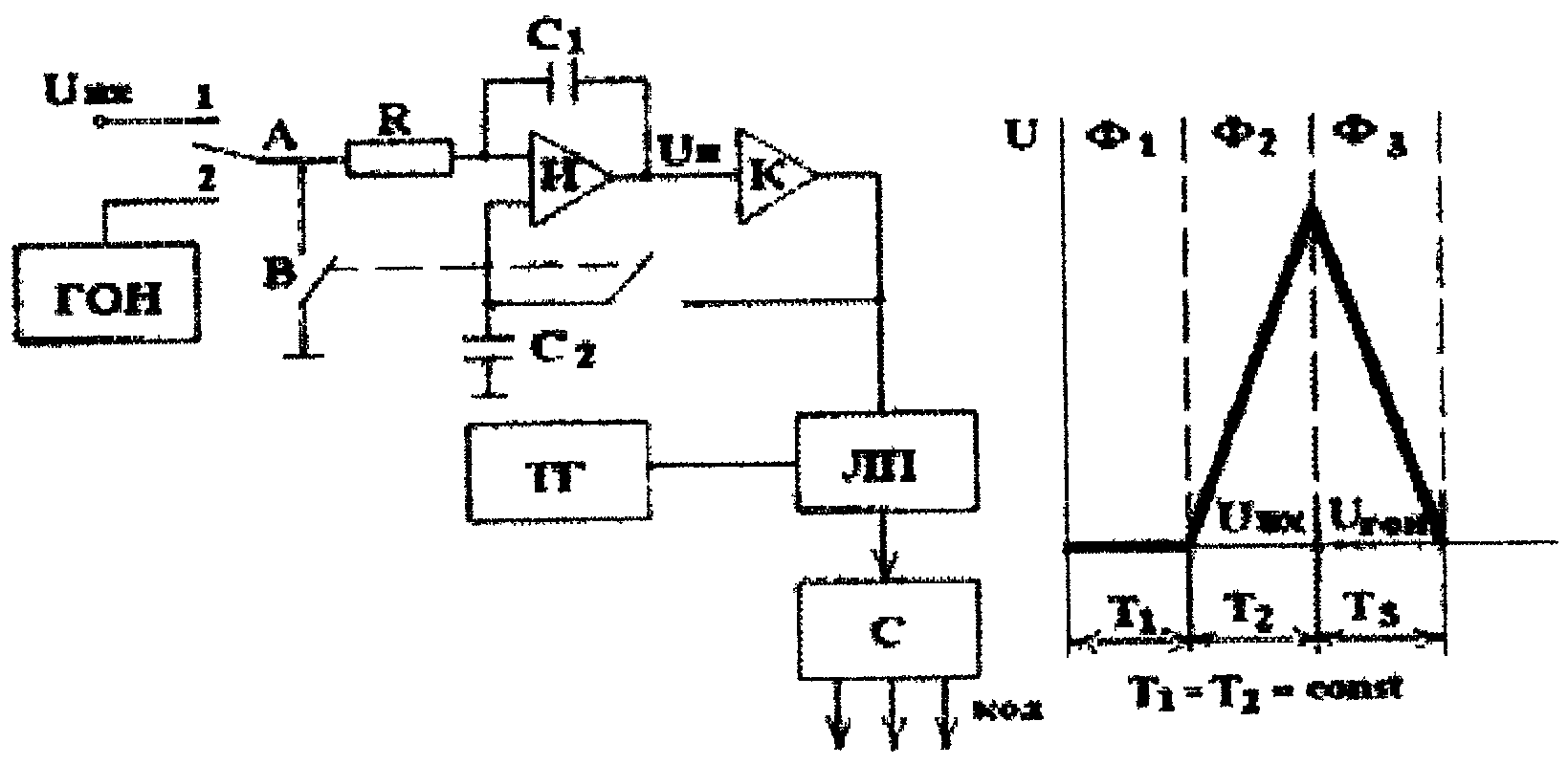
АЦП прямого преобразования. АЦП - двухтактного (двойного) интегрирования. АЦП содержит генератор опорного напряжения ГОН, интегратор И, компаратор К, тактовый генератор ТГ, логический преобразователь ЛП и счетчик С (рис. 3.5, а).
а б
Рис. 3.5. Преобразование аналогового сигнала в цифровой методом интегрирования:
а - схема; б - временная диаграмма (ГОН - генератор опорного напряжения, И -интегратор, К - компаратор, ТГ - тактовый генератор,
С - счетчик, ЛП - логический преобразователь)
Рабочий цикл разбивается на три периода: коррекция нуля (Ф1, интегрирование входного сигнала (Ф2) и интегрирование опорного напряжения (Ф3) (рис. 3.5, б). В первом периоде Ф1 вход АЦП отключен, выключатели В, С замыкаются и конденсатор С2 заряжается до выходного напряжения компаратора К, запоминая ошибку АЦП при отсутствии сигнала. В периоде Ф2 выключатели В, С размыкаются, выключатель А устанавливается в положение 1 и происходит рост напряжения на выходе интегратора пропорционально Uвx с отсчетом заданного числа Т2 импульсов от тактового генератора ТГ. В третьем периоде выключатель А устанавливается в положение 2 и на вход интегратора подается опорное напряжение противоположной полярности. Его выходное напряжение начинает падать до нуля за время импульсов Т3. Цифровой код формируется в счетчике С в зависимости от числа импульсов тактового генератора ТГ. Он определяется по отношению числа импульсов в периодах Ф3 и Ф2:
![]() .
(3.7)
.
(3.7)
Точность метода интегрирования зависит только от стабильности опорного напряжения.
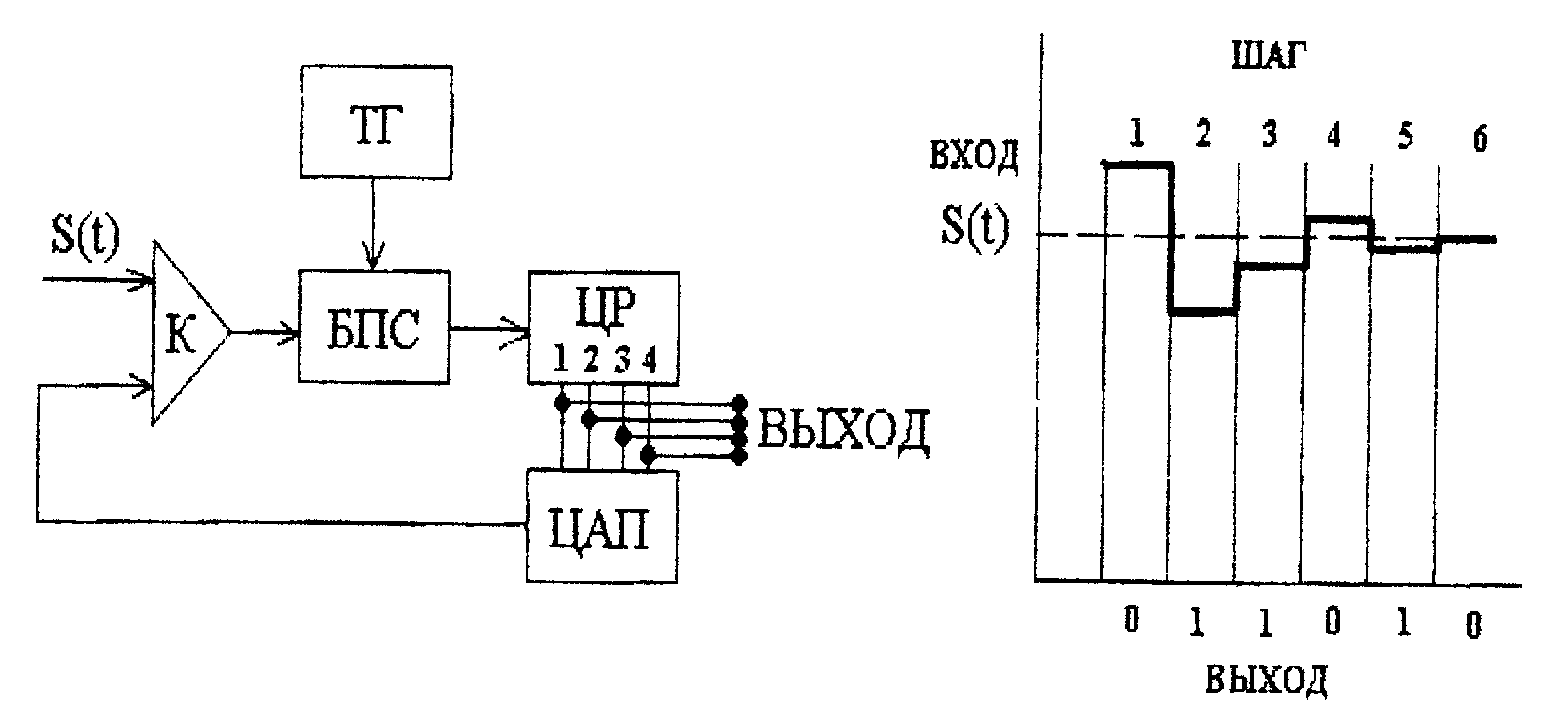
АЦП уравновешивающего преобразования. АЦП последовательного приближения. Метод основан на приближенном преобразовании аналогового сигнала в цифровой код, преобразовании кода снова в аналоговый сигнал и сравнении получившегося сигнала с выходным. Если получившееся значение меньше входного, то соответствующий разряд равен единице, если больше - то он равен нулю. Перебор разрядов продолжается до тех пор, пока оба значения не станут равными. АЦП последовательного приближения содержит компаратор К, тактовый генератор ТГ, блок последовательного сравнения БПС, цифровой регистр ЦР и цифро-аналоговый преобразователь ЦАП (рис. 3.6, а).
а б
Рис. 3.6. Преобразование аналогового сигнала в цифровую форму методом последовательного приближения:
а - схема преобразователя (К - компаратор, ТГ - тактовый генератор,
БПС - блок последовательного сравнения, ЦР - цифровой регистр,
ЦАП - цифро-аналоговый преобразователь);
б - принцип преобразования
На первом шаге тактового генератора сигнал S(t) проходит через компаратор К, блок последовательного сравнения и устанавливает значение первого разряда равным 1. Это значение преобразуется цифро-аналоговым преобразователем ЦАП в непрерывную величину, которая подается на второй вход компаратора. Если она меньше, чем S(t), то значение первого разряда меняется на 0. На втором шаге то же самое происходит для второго разряда (рис. 3.6, б). Если выходное напряжение ЦАП меньше S(t), то значение второго разряда остается равным 1. Через несколько шагов выходное напряжение ЦАП для заданного числа разрядов становится равным входному S(t) и преобразование заканчивается. После этого сформированный выходной код передается на вход устройства управления. Продолжительность преобразования в п-разрядный код равна общей длительности п импульсов тактового генератора.
Цифроаналоговые преобразователи. Цифроаналоговым преобразователем (ЦАП) называется устройство, преобразующее входное сообщение из цифровой формы представления в аналоговую.
ЦАП находят широкое применение не только как составная часть АЦП уравновешивающего преобразования, но и в качестве устройств сопряжения контроллеров управляющими и регистрирующими устройствами, в программируемых источниках питания и генераторах функций и др. ЦАП, в которых источник опорного напряжения может изменяться, обычно называют "умножающими", а ЦАП c внутренним неизменным источником – "полным".
Многие технические характеристики ЦАП в основном те же, что и у АЦП. Следует отметить, что у ЦАП проявляется одна из наиболее трудно устранимых погрешностей – дифференциальная нелинейность, связанная с разбросом параметров резисторов в делителе и аналоговых ключах.
Динамические погрешности ЦАП, как и АЦП, обусловлены инерционностью отдельных элементов и узлов, входящих в ЦАП. Однако ЦАП имеют и так называемую коммутационную помеху в виде выходных всплесков при смене входного кода. Такие всплески представляют собой острые пики выходного сигнала, возникающие за счет несинхронности открывания и закрывания аналоговых ключей в разных разрядах делителя ЦАП. Наиболее значительно они проявляются при продолженных переходах, когда кодовая комбинация типа 011...1 сменяется на 100...0. При этом за счет более медленного выключения ключей на выходе ЦАП будет существовать некоторое время сигнал, соответствующий коду 111... 1, который воспринимается как коммутационная помеха. Эта помеха характерна для быстродействующих ЦАП, где сведены к минимуму емкости, которые могли бы ее сгладить. Радикальным способом подавления выбросов является использование вместе с ЦАП устройств выборки – хранения или стробируемых компараторов.
Широко распространенная схема ЦАП на базе матрицы сопротивлений типа R-2R показана на рис. 3.7. С помощью переключателей S1-S8 на схеме условно показаны значения отдельных двоичных разрядов входного кода ЦАП. Если. все разряды имеют низкий уровень (0), то выходное напряжение равно нулю. На практике, однако, в этом случае на выходе может быть некоторое напряжение, вызванное напряжением смещения операционного усилителя. Для устранения этого напряжения служит схема автоматической балансировки, условно показанная на рис. 3.7 с помощью потенциометра "баланс". Если старший значащий разряд S8 равен 1, выходное напряжение примерно равно 1/2Eоп так как коэффициент усиления по напряжению операционного усилителя, охваченного отрицательной обратной связью, равен отношению сопротивления обратной связи к сопротивлению на входе. Аналогично, если установлен (т.е. равен 1) только 7-й разряд, то выходное напряжение равно 1/4Eоп ,а вклад младшего разряда байта в выходное напряжение равен 2-8Eоп . Полное выходное напряжение равно сумме вкладов отдельных разрядов:
![]() ,
,
где Si, - значения разрядов входного байта преобразователя. Для работы рассмотренного ЦАП необходим источник прецизионного напряжения Eоп.
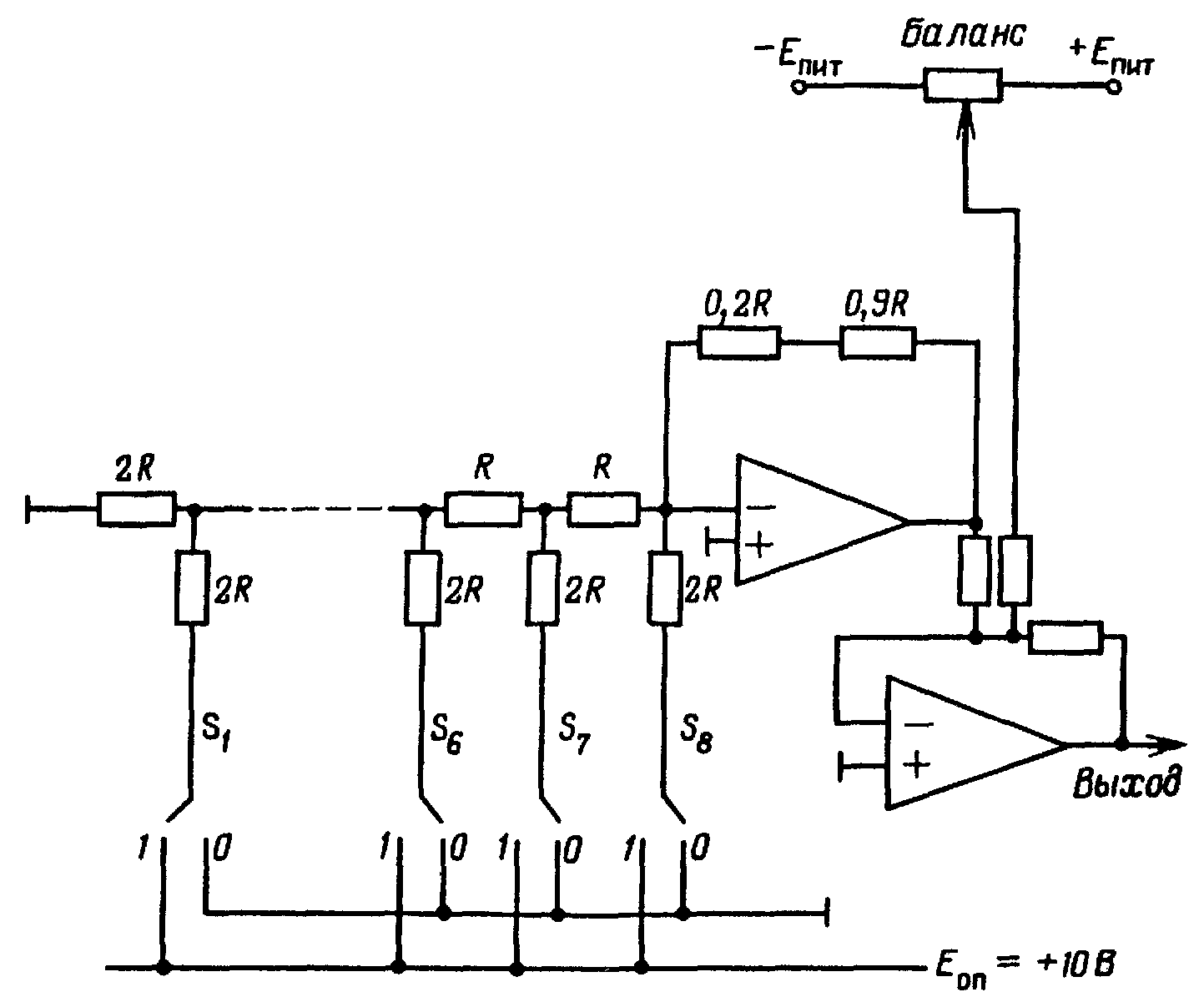
Рис. 3.7. Схема цифро-аналогового преобразователя (ЦАП)
Вывод выходных сигналов на исполнительные устройства. Расчетные значения управляющих воздействий или их приращений представляются в цифровом приборе в виде двоичных чисел. Для управления исполнительными устройствами непрерывного типа (пневматическими, гидравлическими или электрическими приводами) необходимо преобразование цифровых данных в соответствующие аналоговые сигналы. Это преобразование выполняется с помощью цифроаналоговых преобразователей (ЦАП) и фиксирующих элементов с памятью, сохраняющих преобразованные значения управляющих воздействий в промежутках между моментами обращения управляющей программы к ЦАП.
Обычно один ЦАП используют для управления несколькими исполнительными устройствами (рис. 3.8) с помощью коммутатора (демультиплексора), передающего сигнал с выхода ЦАП на один из фиксирующих элементов, запоминающих преобразованный выходной сигнал в промежутке между обращениями к данному исполнительному устройству. Для управления непрерывными исполнительными устройствами, входящими в систему ГСП, на их вход должны выдаваться сигналы определенного уровня (0-10 В, 0-20 мА или 4-20 мА постоянного тока) с выхода устройства вывода информации из контроллера.
В дальнейшем этот сигнал усиливается в устройстве и преобразуется в положение регулирующего органа. Иногда между контроллером и исполнительным устройством включается промежуточный (например, электропневматический) преобразователь управляющего сигнала. В современных исполнительных устройствах цифроаналоговые преобразователи в интегральном исполнении вместе со схемой приема двоичного кода из МПС входят в состав самого устройства. В этом случае управляющее воздействие выводится из МПС непосредственно, без цифроаналогового преобразования, обычно в последовательном коде.
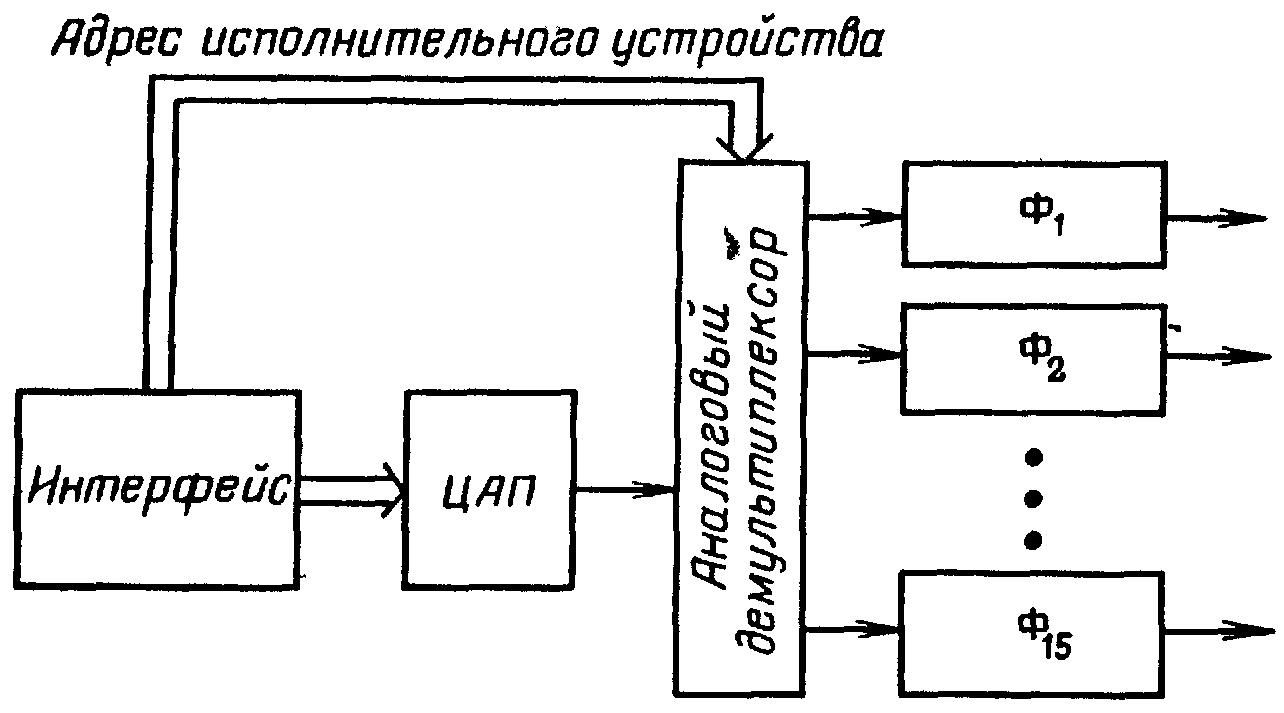
Рис. 3.8. Вывод сигналов на исполнительные устройства:
ЦАП - цифроаналоговый преобразователь;
Ф схема выборки хранения (фиксатор)
Для управления абсолютным положением регулирующего органа (0-100%) МПС может выдавать сигналы одного знака, но ЦАП в этом случае должен иметь достаточно большую разрядность (8-12 бит), для того чтобы обеспечить достаточную точность преобразования. При выдаче приращения управляющего воздействия требования к разрядности ЦАП ниже (6-8 бит), но выходной сигнал машины должен быть разного знака.
По принципу действия исполнительные устройства можно разбить на следующие 4 группы:
1) исполнительные устройства с пропорциональными характеристиками (мембранные исполнительные механизмы, гидроприводы с механической обратной связью);
2) интегрирующие исполнительные устройства (гидроприводы без обратной связи, приводы на основе электродвигателей постоянного тока с регулируемой скоростью);
3) интегрирующие исполнительные устройства с постоянной скоростью (реверсивные электродвигатели переменного тока);
4) исполнительные устройства дискретного типа (шаговые двигатели).