

Вопросы для самопроверки
Какую функцию выполняет регулирующий орган в системах автоматического управления?
Дайте классификацию и поясните принцип работы основных групп регулирующих органов (РО).
Поясните основные технические характеристики РО.
Должен знать: разновидности, принципы действия и характеристики регулирующих органов (РО).
Должен уметь: различать разные системы РО, выбирать в зависимости от условий эксплуатации, рассчитывать характеристики РО.
Тема 12. Общие сведения о частотно-регулируемом электрическом приводе
Литература: [4], п.п. 4.2-4.4
Применение электроприводов с частотным управлением позволяет решить сложные технологические задачи путем автоматического управления параметров движения (скорость, момент и т.п.) электрических двигателей и механизмов; энерго- и ресурсосбережения благодаря оптимизации режимов работы оборудования; эффективно использовать приводные электродвигатели за счет оптимизации законов частотного управления и высокого качества выходного напряжения. Правильное использование частотно-регулируемого электропривода обеспечивает увеличение ресурса работы электротехнического и механического оборудования, в том числе электродвигателей, за счет плавности регулирования, отсутствия пусковых токов повышенной кратности и механических ударных нагрузок.
В частотных преобразователях реализуется также защита самого преобразователя, асинхронного двигателя и питающей сети от токов недопустимой перегрузки, короткого замыкания, недопустимых перенапряжений и отклонений (исчезновения) напряжения питающей сети; неполнофазного режима работы, перегрева. Системы частотного управления электроприводами создаются в виде частотных преобразователей.
Различают скалярный и векторный способы частотного управления приводных электродвигателей. Скалярный способ (управление частотой вращения) может быть реализован на основе автономного инвертора напряжения с управлением частотой по длительности и широтно-импульсной модуляцией (ШИМ-управление).
Для получения высокого качества управления электроприводом в статических и динамических (переходных) режимах в широком диапазоне регулирования скорости, в том числе в области нулевых скоростей, необходимо иметь возможность быстрого непосредственного управления моментом электродвигателя (векторное управление). Момент определяется величиной (амплитудой) и фазой двух моментообразующих составляющих: тока и магнитного потока. Токи и потокосцепления статора и ротора асинхронного двигателя вращаются с разными угловыми скоростями, имеют разные изменяющиеся во времени фазовые параметры и не подлежат непосредственному измерению и управлению. Доступной управляемой переменной в асинхронном двигателе является лишь ток статора, который имеет составляющие образующие магнитный поток и момент. Фазовая ориентация двух этих составляющих может быть осуществлена только внешним управляющим устройством. Иными словами, в асинхронном двигателе необходимо обеспечить управление, как амплитудой, так и фазой тока статора, то есть оперировать с векторными величинами, чем и обусловлен термин «векторное управление». Синонимами данного термина, отражающими некоторые различия используемых методов измерения параметров и управления их фазой, являются: «управление полем», «ориентация поля», «прямое управление моментом», «регуляторы угла» и т.п. Векторное управление осуществляется широтно-импульсной модуляцией.
Частота ШИМ-управления программно может быть изменен в широком диапазоне 0,6 16 кГц. Выбор частоты ШИМ-управления обусловлен с одной стороны синусоидальностью тока асинхронного двигателя чем выше частота, тем лучше форма кривой тока, с другой стороны чем выше частота, тем выше динамические потери в элементах преобразователя.
Блок-схема электропривода с частотным управлением представлена на рис. 12.1.
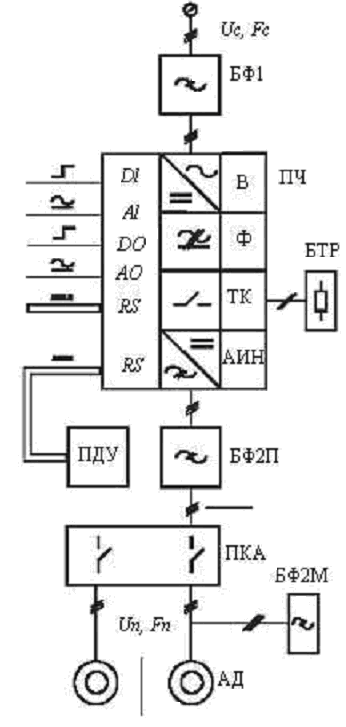
Рис. 12.1. Блок-схема электропривода с частотным управлением:
ПДУ – пульт дистанционного управления; БФ1 – блок входного фильтра;
ПЧ – преобразователь частоты; БТР – блок тормозного резистора;
БФ2П, БФ2М – блоки выходного фильтра; АД асинхронный двигатель
В зависимости от мощности электропривода выпрямитель электропривода может быть неуправляемым диодным (для малой мощности), управляемым диодно-тиристорным (электроприводы большей мощности), диодно-транзисторным в электроприводах с рекуперативным торможением. Согласованная работа выпрямителя, инвертора и тормозного ключа в электроприводе обеспечивается системой управления.