

Вопросы для самопроверки
Поясните назначение барьеров искрозащиты.
Назовите основные функции и характеристики нормирующих преобразователей (НП).
Поясните назначение, принцип действия и характеристики устройств гальванического разделения цепей.
В чем заключается защита цепи от разрыва при распределении унифицированных токовых сигналов?
Поясните защиту от дребезга контактов дискретных датчиков.
Дайте классификацию аналого-цифровых преобразователей (АЦП) и опишите их принцип работы.
Нарисуйте схему цифроаналогового преобразователя (ЦАП) и поясните его работу.
Нарисуйте схему ввода аналоговых сигналов в цифровую систему.
Нарисуйте схему вывода сигналов с цифровой на исполнительные устройства.
Должен знать: назначение, классификацию, принцип действия и состав устройств ввода-вывода, методы АЦП и ЦАП, расчета их погрешностей.
Должен уметь: различать устройства ввода-вывода по различным признакам, рассчитывать погрешности при изменении параметров входа или выхода.
Тема 4. Функциональный состав цифровых тса
Литература: [11], [12]
Современные цифровые регуляторы (ЦР) являются микропроцессорным конфигурируемым потребителем прибором с индикацией текущих значений преобразуемых величин и предназначен для функционирования как в автономном режиме, так и совместно с другими приборами, объединенными в локальную компьютерную сеть. Просмотр и изменение параметров конфигурации ЦР производится как с кнопочной клавиатуры, так и с помощью специальных программ при подключении прибора к компьютеру. Связь прибора с компьютером осуществляется по интерфейсу RS-232 или RS-485. Может быть осуществлен обмен данными в составе промышленной информационно-вычислительной сети посредством сетевого модуля.
Широкое распространение получили ЦР, воздействующие на объект управления дискретно-импульсным выходным сигналом с широтно-импульсной (ШИМ) модуляцией. Такие ЦР имеют достаточно простую конструкцию, малые габариты, высокую точность и интегрируемость в современные АСУТП. Рассмотрим ЦР, внешний вид и типичная функциональная схема которого представлены на рис. 4.1, 4.2.
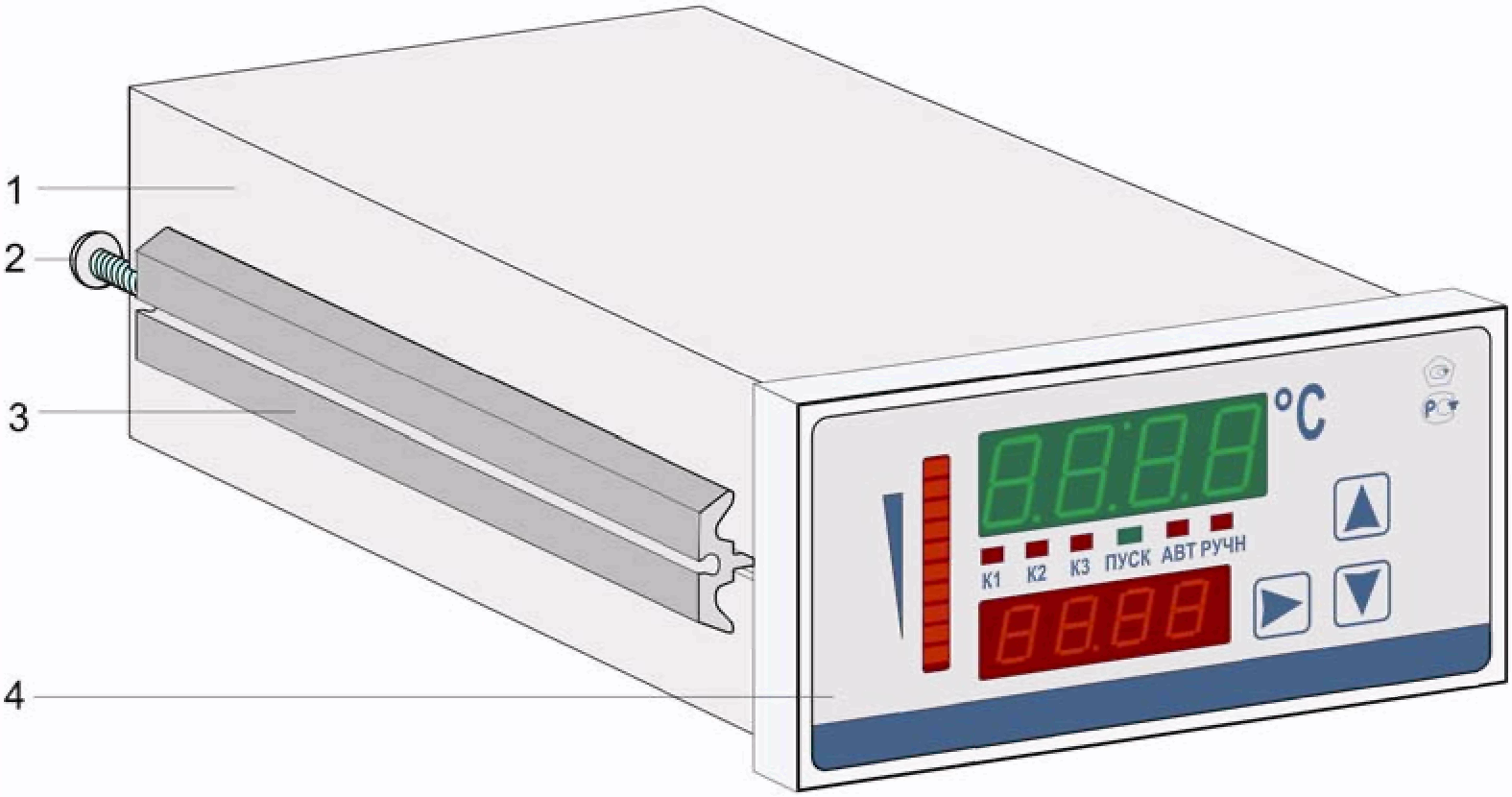
Рис. 4.1. Внешний вид цифрового регулятора:
1 – металлический корпус; 2 – винт; 3 – крепежная скоба; 4 – лицевая панель.

Рис. 4.2. Функциональная схема цифрового регулятора
ЦР состоит из следующих основных модулей:
модуль импульсного блока питания;
модуль индикации и клавиатуры;
модуль аналого-цифрового преобразования (АЦП) с гальванической развязкой;
модуль преобразователь встроенный измерительный (ПВИ) с гальванической развязкой;
модуль интерфейсов RS-232/485 с гальванической развязкой;
блок реле;
блок дискретных входов с гальванической развязкой;
микропроцессорный блок управления.
Индикация измеряемых величин в ЦР происходит на основном светодиодном индикаторе (СД - индикаторе). На дополнительном СД -индикаторе отображается уставка регулятора или значение параметра конфигурации. Входными являются унифицированные электрические сигналами в виде постоянного тока 0…5, 0…20 или 4…20 мА, с термопреобразователями сопротивления (ТС) и преобразователями термоэлектрическими(ТП), а также для измерения напряжения постоянного тока до 100 мВ и сопротивления постоянному току до 320 Ом.
ЦР осуществляет функцию регулирования с использованием пропорционально-интегрально-дифференциального закона (ПИД), пропорционально - дифференциально закона (ПД) с возможностью вывода управляющего воздействия или сигнализации на любые реле или ПВИ.
Имеется функция автоматической оптимальной настройки ПИД и ПД−регулирования непосредственно на объекте.
Пользователю предоставляется возможность конфигурирования (управлять функционированием) прибора, устанавливая соответствующие значения параметров в режиме меню.
Модуль импульсного блока питания преобразует сетевое напряжение 220 В частотой 50 Гц в постоянные стабилизированные напряжения для питания модулей индикации и клавиатуры, АЦП, ПВИ, интерфейсов RS-232/485, блока реле, микропроцессорного блока управления. Кнопка выключения питания не предусмотрена, так как ЦР предназначен для работы в непрерывном режиме.
Модуль индикации и клавиатуры предназначен для:
управления работой прибора с помощью кнопок, расположенных на лицевой панели;
визуализации результатов измерений и параметров конфигурации ЦР;
вывода цифровой и символьной информации о текущем состоянии прибора.
Модуль АЦП предназначен для преобразования входного аналогового сигнала от различных типов первичных преобразователей в цифровой код и передачи его в микропроцессорный блок управления.
Модуль ПВИ служит для преобразования цифрового кода, поступающего из микропроцессорного блока управления, в унифицированный сигнал постоянного тока 0...5 мА, 0...20 мА или 4...20 мА. В состав модуля ПВИ входит дополнительный дискретный вход, который может быть подключен к выходу типа «открытый коллектор» или «сухой контакт».
Модуль интерфейсов RS-232/485 предназначен для связи с компьютером и обеспечивает двухсторонний обмен данными с внешними устройствами через стандартные интерфейсы RS-232 или RS-485.
Блок выходных реле содержит три исполнительных реле («К1», «К2», «К3») и предназначен для управления внешними исполнительными устройствами, подключенными к прибору.
Блок дискретных входов состоит из трех дискретных входов, срабатывающих при подключении к ним напряжения ~220 В и предназначенных для дистанционного управления при реализации процессов ПИД/ПД и ручного регулирования.
Микропроцессорный блок управления содержит микроконтроллер, ПЗУ с программным обеспечением, энергонезависимое запоминающее устройство и выполняет следующие функции:
преобразование цифрового кода в соответствующее значение измеряемой величины;
анализ результата текущего измерения в режиме реального времени;
управление процессами взаимодействия между модулями ЦР;
управление состоянием реле по результатам измерений;
вывод текущего значения измеряемой величины или значений уставок на индикаторы;
опрос клавиатуры;
управление модулем интерфейсов RS-232/485;
реализация процессов ПИД/ПД/ручного регулирования.
Элементы индикации и управления ЦР. На лицевой панели ЦР находятся один шкальный, два четырехразрядных семисегментных и 6 единичных светодиодных (СД)-индикаторов, а также три кнопки управления.
Основной индикатор представляет собой четырехразрядный семисегментный СД-индикатор зеленого свечения с высотой индицируемых символов 10 мм и предназначен для индикации измеренного значения физической величины и названия параметра конфигурации.
Дополнительный индикатор представляет собой четырехразрядный семисегментный СД-индикатор красного свечения с высотой индицируемых символов 7 мм и предназначен для индикации значения уставки процесса регулирования и значения параметра конфигурации.
Блок единичных индикаторов включает в себя три СД-индикатора «К1», «К1», «К3» состояния выходных реле, запуска ПИД-/ПД регулирования «ПУСК» , запуска автонастройки «АВТ» и состояния переключателя режима автоматического на ручное регулирование «РУЧН».
Шкальный индикатор красного свечения предназначен для индикации и визуальной оценки текущего уровня выходной мощности при двухпозиционном ПИД-регулировании.
Общие принципы работы ЦР. Работа ЦР происходит в циклическом режиме с периодом 0,5 сек. За один цикл работы ЦР производит одно измерение сигналов в аналоговом и четырех дискретных входных каналах. Полученные результаты анализируются микропроцессорным блоком и в зависимости от настроек прибора и текущего режима вырабатываются управляющие сигналы на выходные реле (на регулирование и/или сигнализацию), результат измерения выводится на индикатор и выходной преобразователь ПВИ в виде унифицированного сигнала.
Преобразование и обработка входного сигнала. В начале каждого цикла измерений входной сигнал от первичного преобразователя поступает на универсальный измерительный вход и преобразуется модулем АЦП в цифровой код, который поступает в микропроцессорный блок управления для дальнейшей обработки, определяемой конфигурацией прибора. Дальнейшая обработка цифрового кода зависит от программы пользователя. Это может быть преобразование цифрового кода в соответствии с номинальной статической характеристикой (НСХ) первичного преобразователя, нелинейное преобразование (извлечения квадратного корня), коррекция нуля и/или изменение чувствительности (наклона характеристики), фильтрация низких частот.
Формирование сигнала управления в процессах регулирования. В процессах ПИД-/ПД-регулирования измеренное (текущее) значение сравнивается с уставкой процесса регулирования, в результате чего вычисляется величина сигнала управления объектом регулирования. Сигнал управления преобразуется алгоритмом ШИМ-модуляции в последовательность импульсов определенной длительности. Импульсы подаются на один (ПИД-/ручное регулирование) или два (ПД-регулирование) из трех релейных выходов «К1», «К2», «К3», которые используются для управления работой исполнительного механизма.
При ручном регулировании величина управляющего воздействия задается пользователем с помощью дискретных входов. Переключение с ручного управления на ПИД-регулирование и обратно может осуществляться пользователем через один из дискретных входов.
Пользователю предоставляется также возможность осуществлять регистрацию измеренных значений и/или управление исполнительными устройствами с помощью выхода ПВИ, который может быть настроен как на преобразование действительных значений измеренной величины, так и на преобразование значений текущей выходной мощности.
Возможны режимы индикации измерений, ввода паролей, меню, просмотра значений уставок и выходной мощности.
Широтно-импульсная модуляция (ШИМ). ШИМ-модуляция используется в процессах ПИД-/ПД-/ручного регулирования, а также в процессе автонастройки для формирования управляющих сигналов. Алгоритм ШИМ-модуляции преобразуют сигнал управления в последовательности импульсов c заданным периодом Tшим, поступающих на один из релейных выходов. Период Tшим задается пользователем при программировании. Длительность импульсов τ1, τ2,… пропорциональна значению сигнала управления (рис. 4.3).
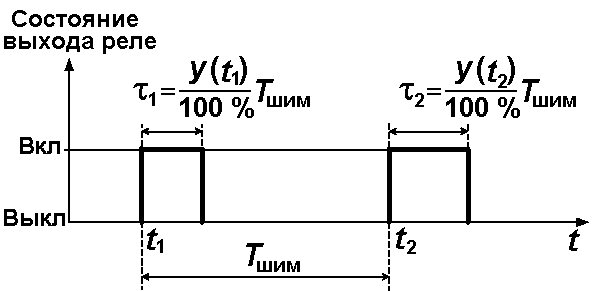
Рис. 4.3. ШИМ-модуляция
Цифровые системы управления. Если цифровое устройство оперирует числовыми представлениями со значительным количеством разрядов, то квантованием по уровню можно пренебречь. И системы управления с такими цифровыми устройствами можно рассматривать как системы с амплитудно-импульсной модуляцией (АИМ-системы).
Цифровая система управления (ЦСУ) включает объект управления (ОУ), чувствительные элементы (ЧЭ), аналого-цифровой преобразователь (АЦП), цифровое вычислительное устройство (ЦВУ) и цифро-аналоговый преобразователь (ЦАП) (рис. 4.4). АЦП преобразует аналоговый сигнал в цифрой, а ЦАП – цифровой сигнал в аналоговый. ЦВУ выполняет все необходимые вычисления в соответствии с заданным алгоритмом управления, т. е. представляет собой регулятор.

Рис. 4.4
Если пренебречь квантованием по уровню, цифровую систему управления можно представить в виде блок-схемы (рис. 4.5), состоящей из прерывателя, дискретного фильтра (ДФ), фиксатора нулевого порядка (ФНП) и непрерывной части (НЧ).

Рис. 4.5
Прерыватель является моделью АЦП и преобразует непрерывный сигнал e(t) в дискретный сигнал е[lТ]. В дальнейшем прерыватель в явном виде на схеме не будем указывать, принимая, что он входит в состав ДФ.
Дискретный фильтр представляет собой модель ЦВУ и характеризуется дискретной передаточной функцией – передаточной функцией регулятора. В качестве ЦАП чаще всего используется фиксатор нулевого порядка – элемент, который запоминает входной дискретный сигнал на один период – до прихода следующего дискретного сигнала. Фиксатор нулевого порядка можно рассматривать как АИМ-элемент, вырабатывающий прямоугольные импульсы длительности Т (относительная длительность = 1) и с амплитудой Аи = 1. Представив ФНП в виде эквивалентной схемы, состоящей из простейшего импульсного элемента и формирующего звена, получим эквивалентную схему цифровой системы управления (рис. 4.6).

Рис. 4.6.
На этой схеме W*(E) – передаточная функция (в операторной форме) дискретного фильтра (регулятора), Wп(p) – передаточная функция ПНЧ. Передаточная функция (в изображениях Лапласа) формирующего звена Wф(р) = 1 – e-Tр/р.
Передаточная функция (в изображениях Лапласа) ПНЧ
![]() .
.
Дискретная передаточная функция ПНЧ
![]() ,
,
или
![]() .
.
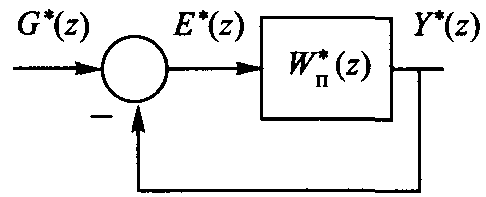
Используя эту передаточную функцию, можно построить структурную схему дискретной модели цифровой системы управления (рис. 4.7).
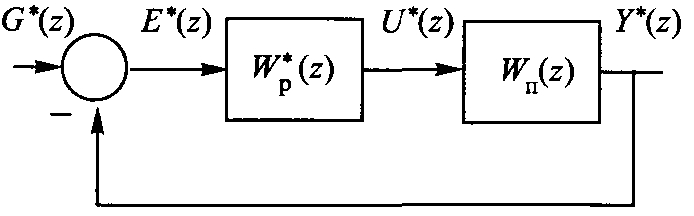
Рис. 4.7
Пример
4.1. Дана
цифровая система управления, у которой
передаточная функция непрерывной части
![]() и цифровое вычислительное устройство
реализует алгоритм управления,
определяемый разностным уравнением
и цифровое вычислительное устройство
реализует алгоритм управления,
определяемый разностным уравнением
u[(l + 1)Т] - u[lТ] = 2е[l + 1)Т] – е[lТ].
Требуется определить передаточную функцию данной системы относительно входа g(t) и выхода y(t) (рис. 4.6).
Решение. Запишем уравнение регулятора в операторной форме:
(Е - 1)u[lТ] = (2Е - 1)е[lТ].
Отсюда передаточная функция регулятора в операторной форме
![]() .
.
и в z-изображениях
![]() .
.
Передаточная функция приведенной непрерывной части
![]() .
.
Дискретная передаточная функция ПНЧ
![]() .
.
Корнями полинома A(p) – p(p2 + 3p + 2) являются p1 = 0, p2 = – 1, p3 = -2 и производная A'(p) = 3p2 + 6p + 2. По формуле (6.2)
![]() .
.
Следовательно,
![]() .
.
Искомая передаточная функция замкнутой системы
![]() .
.
ШИМ-системы управления. Блок-схема ШИМ-системы управления включает ШИМ-элемент (импульсный элемент с широтно-импульсной модуляцией) и НЧ (рис. 4.8). Пусть ШИМ-элемент вырабатывает прямоугольные импульсы с амплитудой Аи и периодом Т. На выходе ШИМ-элемента ширина модулированного импульса пропорциональна модулю |е[iТ]|, а ее знак совпадает со знаком входного сигнала в момент съема. Модулированный импульс на выходе ШИМ-элемента можно представить как разность двух ступенчатых функций:
s(t - iТ) = Аиsigne[iT][1(t - iT) - 1(t - (i + i)],
где
i
= |е[iT]|.
Здесь
является константой, удовлетворяющей
неравенству 0 < < l/em,
em
=
![]() ,
и называетсякоэффициентом
модуляции.
,
и называетсякоэффициентом
модуляции.
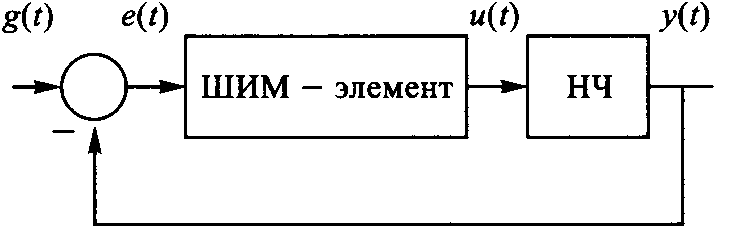
Рис. 4.8
Линеаризация. Уравнения ШИМ-элемента являются нелинейными. Если выполняется условие iТ << 1 или Т << 1 (i 1), то можно произвести линеаризацию и получить дискретно-непрерывную модель (рис. 4.9, а), а после дискретизации – дискретную модель (рис. 4.9, б). Здесь
Wп(p) = АиTWн(p), Wп*(z) = ZT{Wп(s)} = АиTZT{Wп(р)}.

а б
Рис. 4.9
Пример 4.2. Дана ШИМ-система управления (рис. 4.8). Амплитуда Аи = 1, коэффициент модуляции = 0,05, период следования импульсов Т = 0,1 и передаточная функция непрерывной части Wн(р) = 200/[р(p+ 1)]. Требуется определить дискретную передаточную функцию замкнутой системы Wyg*(z).
Решение. Так как
![]() ,
,
то
![]() .
.
Искомая передаточная функция
![]() .
.