

Вопросы для самопроверки
Дайте классификацию ТСА по роду используемой энергии.
Поясните классификацию ТСА по функциональному назначению.
Для чего используются первичные измерительные и нормирующие преобразователи?
Поясните состав технических средства преобразования, передачи по каналам связи, обработки, хранения информации и выработки команд управления.
Какие устройства входят в технических средства использования командной информации и каково их функциональное назначение?
Какие разновидности регулирующих органов вы знаете?
Назовите состав сервисных средств автоматизации.
Должен знать: классификацию технических средств измерений (ТСА), назначение и состав групп ТСА.
Должен уметь: классифицировать ТСА, различать их по различным признакам.
Тема 2. Электрические аналоговые регуляторы
Литература: [6], п.п. 2; [14], п.п. 3, 4; [2], п.п. 8
Автоматический регулятор (АР) – это средство автоматизации, получающее, усиливающее и преобразующее сигнал отклонения регулируемой величины и целенаправленно воздействующее на объект регулирования; он обеспечивает поддержание заданного значения регулируемой величины или изменение ее значения по заданному закону. Автоматический регулятор во взаимосвязи с объектом регулирования образует автоматическую систему регулирования (АСР).
Автоматические регуляторы классифицируются в зависимости от назначения, принципа действия, конструктивных особенностей, вида используемой энергии и др.
По виду регулируемого параметра автоматические регуляторы подразделяются на регуляторы температуры, давления, разрежения, расхода, уровня, состава и содержания вещества и т.п.
По конструктивным признакам автоматические регуляторы подразделяются на аппаратные, приборные, агрегатные и модульные (элементные).
Регуляторы аппаратного типа конструктивно представляют собой техническое устройство, работающее в комплекте с первичным измерительным преобразователем. Аппаратные автоматические регуляторы работают независимо (параллельно) от средств измерения данного технологического параметра.
Регуляторы приборного типа работают только в комплекте с вторичным измерительным прибором. Приборные регуляторы не имеют непосредственной связи с первичным измерительным преобразователем.
Сигнал об отклонении регулируемой величины от заданного значения (t) поступает на вход приборного регулятора от вторичного измерительного прибора. Для этого измерительный прибор имеет задающее устройство, на котором вручную устанавливается требуемое заданное значение регулируемой величины. Заданное значение g(t) в приборе сравнивается с действительным значением x(t) регулируемой величины, определяемым положением подвижной измерительной системы прибора, и разность (t) = g(t) – x(t) подается на вход регулятора.
В ряде случаев и само регулирующее устройство приборного типа размещается в одном корпусе с вторичным измерительным прибором.
Таким образом, регуляторы приборного типа включаются последовательно с вторичным измерительным прибором.
Достоинством регуляторов приборного типа является то, что в этом случае не требуется установка дополнительных первичных измерительных преобразователей и прокладка линий связи от них до регуляторов; их недостаток – более низкие динамические свойства и надежность по сравнению с аналогичными параметрами регуляторов аппаратного типа.
Автоматические регуляторы, построенные по агрегатному (блочному) принципу, состоят из отдельных унифицированных блоков, выполняющих определенные функции. Входные и выходные сигналы этих блоков унифицированы. Это позволяет из блоков проектировать автоматические регуляторы различного функционального назначения.
Автоматические регуляторы, построенные по модульному (элементному) принципу, состоят из отдельных модулей (элементов), выполняющих простейшие операции. Входные и выходные сигналы модулей унифицированы. Это позволяет, как и в случае использования агрегатных регуляторов, собирать автоматические регуляторы различного функционального назначения.
В зависимости от источника используемой энергии автоматические регуляторы подразделяются на регуляторы прямого и непрямого действия.
В регуляторах прямого действия одновременно с измерением регулируемой величины от объекта регулирования отбирается часть энергии, которая используется для работы регулятора и воздействия на его исполнительный механизм – регулирующий орган объекта регулирования. Таким образом, к автоматической системе «объект – регулятор» энергия извне не подводится.
В автоматических регуляторах непрямого действия для работы регулятора и воздействия на его исполнительный механизм подводится энергия извне.
В зависимости от вида используемой энергии регуляторы непрямого действия подразделяются на электрические (электромеханические, электронные), пневматические, гидравлические и комбинированные (электропневматические, электрогидравлические и т.д.).
Выбор регулятора по виду используемой энергии определяется характером объекта регулирования и особенностями автоматической системы.
Электрические автоматические регуляторы применяются главным образом для регулирования на невзрывоопасных объектах при больших расстояниях от пункта управления до объекта регулирования.
Электрические регуляторы (особенно электронные) являются сложной аппаратурой и требуют высокой квалификации эксплуатационного и наладочного персонала, а также оснащения эксплуатационных служб дорогостоящими испытательными средствами.
Пневматические автоматические регуляторы применяются во взрыво- и пожароопасных зонах при небольших расстояниях (до 400 м) от пункта управления до объекта регулирования.
Достоинствами пневматических регуляторов являются относительная простота всех элементов регулятора, простота в обслуживании и наладке, взрыво- и пожаробезопасность.
Недостатками пневматических регуляторов являются необходимость в специальном источнике питания систем пневмоавтоматики сжатым воздухом, высокие требования к очистке воздуха от пыли, влаги, масла и т.д. , большая инерционность элементов пневмоавтоматики и линий связи по сравнению с инерционностью электрических регуляторов.
Гидравлические регуляторы применяются во взрыво- и пожароопасных зонах, как правило, при непосредственном размещении элементов регулятора в зоне объекта регулирования.
Гидравлические регуляторы надежны в работе, их исполнительные механизмы при небольших размерах развивают большие перестановочные усилия.
Недостатками гидравлических регуляторов являются необходимость в специальном источнике питания регулятора рабочей жидкостью (в большинстве случаев – маслом), ограниченность радиуса действия, требование полной герметизации всех элементов регулятора и линий связи, трудность реализации сложных законов регулирования.
Комбинированные регуляторы применяются в случаях, когда необходимо использовать отдельные преимущества электро-, пневмо- или гидрорегуляторов.
Например, если требуется разработать автоматическую систему регулирования взрывоопасным объектом при большом удалении пункта управления от объекта, то можно применить электропневматический принцип регулирования. Первичный измерительный преобразователь, исполнительный механизм и линии связи в пределах взрывоопасных зон выполняют пневматическими, а элементы регулятора на пункте управления и линии связи до объекта управления выполняют электрическими.
Сопряжение электрических линий связи с пневматическими осуществляют на границах взрывоопасных зон с помощью специальной преобразующей пневмоэлектрической и электропневматической аппаратуры. Так, пневматический сигнал от первичного измерительного преобразователя с помощью пневмоэлектропреобразователя преобразуется в эквивалентный электрический сигнал, который передается по электрическим линиям связи на электрические элементы регулятора в пункт управления, а электрический сигнал от пункта управления с помощью электропневмопреобразователя преобразуется в эквивалентный пневматический сигнал, который по пневматическим линиям связи поступает на пневматический исполнительный механизм регулятора.
По характеру изменения регулирующего воздействия автоматические регуляторы подразделяются на регуляторы с линейным и нелинейным законами регулирования.
Примером регуляторов с нелинейным законом регулирования могут служить позиционные, и в частности двух- и трехпозиционные, регуляторы.
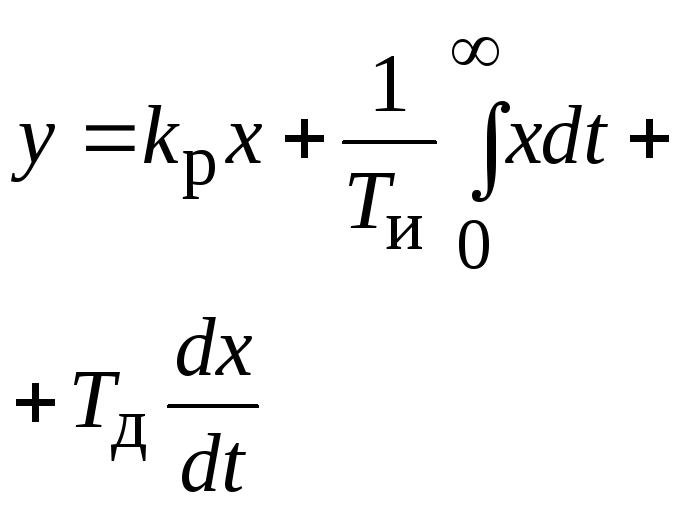
Типы автоматических регуляторов. Автоматические регуляторы (АР) предназначены для построения локальных АСР, главной задачей которых является поддержание регулируемых координат x(t) на уровне заданий xз(t). Каждый АР преобразует входной сигнал (рассогласования или ошибки) = x xз в командное воздействие y(t) в соответствии с линейными законами регулирования пропорциональным (П), интегральным (И), пропорционально-интегральным (ПИ), пропорционально-дифференциальным (ПД), пропорционально-интегрально-дифференциальным (ПИД) и нелинейными позиционными (Пз). Теоретические линейные законы описываются следующими передаточными функциями:
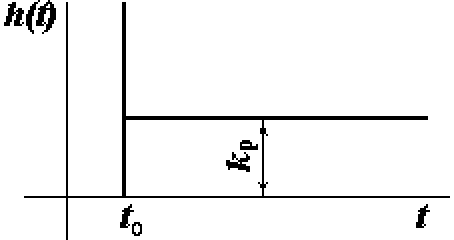
WП(p) = kП; (2.1)
WИ(p) = 1/ТИp; (2.2)
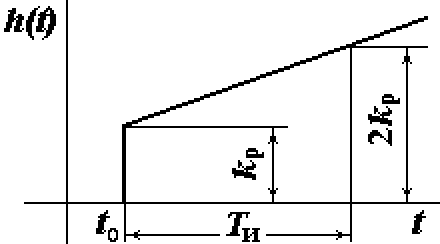
WПИ(p) = kП + 1/ТИp; (2.3)
WПД(p) = kП + ТДp; (2.4)
WПИД(p) = kП + ТДр + ТИ/p, (2.5)
где kП, ТИ, ТД - параметры настройки AP; р - комплексная переменная.
Уравнения в предположении нулевого значения заданной величины и графики переходных процессов представлены в табл. 2.1.
Таблица 2.1.
Законы регулирования промышленных регуляторов
|
Тип регулятора |
Обозначение |
Закон регулирования |
Параметры настройки |
Переходная характеристика |
|
Пропорциональный |
П |
|
|
|
|
Интегральный |
И |
|
|
|
|
Пропорционально- интегральный |
ПИ |
|
|
|
|
Пропорционально- дифференциальный |
ПД |
|
|
|
|
Пропорционально-интегрально- дифференциальный |
ПИД |
|
|
|



Кроме органов настройки, непосредственно изменяющих коэффициент дифференциального уравнения регулятора, регуляторы, как правило, имеют также органы настройки, косвенно влияющие на эти коэффициенты и изменяющие параметры статических характеристик регулятора или режимы его работы, например органы настройки, изменяющие чувствительность регулятора, демпфирование входного сигнала, длительность импульсов при релейно-импульсном способе формирования закона регулирования и т.п.
Параметры регулятора, зависящие от положения этих органов настройки, также называются параметрами настройки регулятора. В качестве примера таких параметров настройки регулятора можно назвать «нечувствительность регулятора нч», «постоянную времени демпфирования Тдф». «длительность импульсов tимп» и т.д.
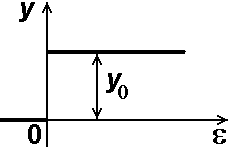
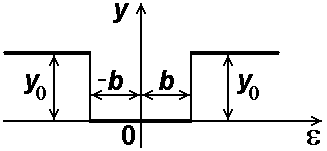
Теоретические статические законы регулирования нелинейных позиционных АР показаны на рис. 2.1 и имеют следующий вид:
двухпозиционный идеальный (рис. 2.1, а)
у = у0Sign; (2.6)
а б

в г
Рис. 2.1. Теоретические законы регулирования нелинейных позиционных АР
двухпозиционный однозначный с зоной нечувствительности (рис. 2.1, б)
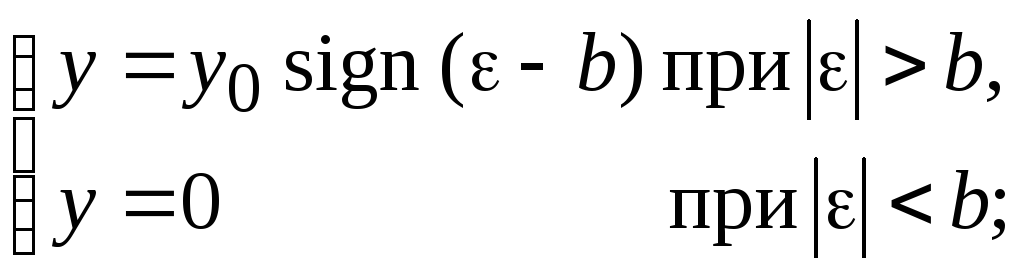 (2.7)
(2.7)
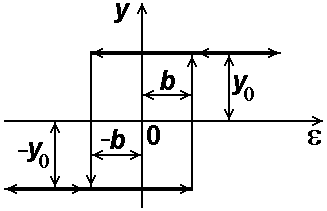
двухпозиционный неоднозначный (с гистерезисом) (рис. 2.1, в)
 , (2.8)
, (2.8)
трехпозиционный неоднозначный (рис. 2.1, г)
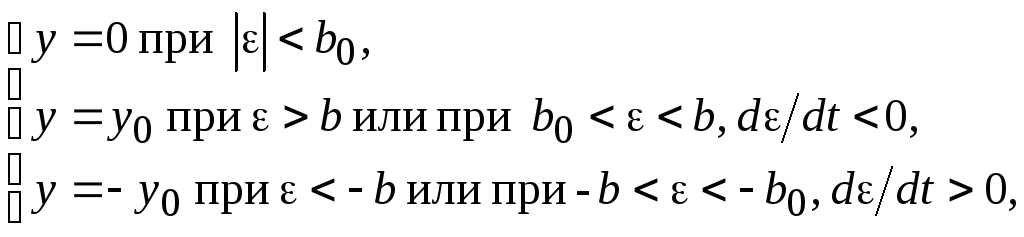 (2.9)
(2.9)
где у0 - максимальное значение выходного сигнала АР;
b, b0 - параметры релейного элемента, характеризующие зоны нечувствительности [-b, b] и гистерезиса возврата (отпускания) [b-b0].
Фактические характеристики реальных АР отличаются от теоретических. Степень этого отличия зависит от структуры и конструктивного оформления АР.
Степень конструктивного совершенства линейных АР оценивают полосой частот [0, н], внутри которой отличия теоретических и фактических амплитудно-фазовых характеристик регулятора несущественно сказываются на качестве переходных процессов в АСР. Для большинства промышленных АР, предназначенных для автоматизации теплоэнергетических (инерционных) ТОУ, полоса частот составляет 0,2-2 рад/с.
К современным АР помимо требований близости фактических и теоретических характеристик предъявляют ряд дополнительных эксплуатационных требований: безударное включение регулятора при переходе с дистанционного управления на автоматическое или с внешнего задания на внутреннее (при супервизорном управлении):
ограничение командного аналогового сигнала по верхнему и нижнему уровням и сигнализация о достижении этих предельных значений;
гальваническое разделение входных и выходных цепей АР; автоматическая коррекция параметров kП, ТИ, ТД для реализации адаптивных законов регулирования.
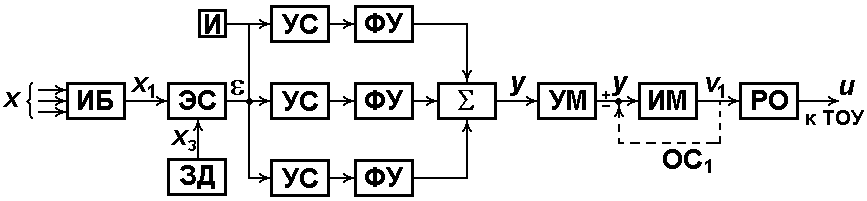
Структуры электрических регуляторов. Типовые структуры электрических АР приведены на рис. 2.2. При любом варианте построения АР в его структуру входят измерительный, формирующий, усилительный и исполнительный блоки, каждый из которых может иметь различное функциональное и конструктивное оформление. Принцип действия обобщенного электрического АР заключается в следующем.

а

б
в
Рис. 2.2. Типовые структурные схемы электрических регуляторов:
а – без обратной связи по положению ИМ;
б – с обратной связью по положению ИМ; в – без обратной связи;
ИБ – измерительный блок, ЭС элемент сравнения, ЗД задатчик,
И - индикатор, УС – усилитель, ОС – обратная связь,
УМ – усилитель мощности, ИМ ‑ исполнительный механизм,
ДП – датчик положения, ФУ - функциональное устройство,
РО – регулирующий орган
Электрические контрольные сигналы (или один сигнал) х от датчиков регулируемых координат ТОУ вводятся в измерительный блок (ИБ), где осуществляется их масштабирование, сглаживание и, в случае необходимости, суммирование. Результирующий сигнал х1 поступает на элемент сравнения (ЭС) -сумматор, в котором из х1 вычитается сигнал задания (уставки) хз, вырабатываемый задатчиком (ЗД) программного или ручного действия. Разбаланс вводят в функциональный блок, состоящий из усилителя (УС) с kп1 и устройства обратной связи (ОС). Сигналы х, х1, и выход функционального блока у имеют небольшую электрическую мощность и характеризуются информационным параметром напряжением. Поэтому напряжение у поступает в усилитель мощности (УМ) с передаточной функцией Wум(p) = 1, выходной сигнал которого у подают на исполнительный блок, состоящий из исполнительного механизма (ИМ) и регулирующего органа (РО). В состав этого блока могут входить пускатели электродвигательных ИМ. При вариациях у и V1 РО изменяет регулирующий параметр и объекта управления (представляющую чаще всего расход вещества или энергии), что ведет к опосредованному изменению в нужном направлении регулируемой координаты х.
Для наладки АР и контроля за его работой в конструкции регулятора вводятся индикаторы (И) разбаланса и выхода у. Для контроля за исполнением команд формирующего блока и построения нужных законов регулирования в АР предусматривают датчики положения ДП исполнительного механизма, имеющие электрический выходной сигнал.
Для формирования закона регулирования используют разные структуры АР и соответственно исполнительных блоков.
Так, для электрических АР без обратной связи по положению ИМ (рис. 2.2, а) передаточная функция Wp(p) равна произведению передаточных функций формирующего блока Wос-1(р) и исполнительного механизма Wим(p). Часто в качестве исполнительных используются электродвигательные механизмы, которые можно представить интегрирующим (астатическим) звеном с передаточной функцией Wим(p)=kим/р, где kим = 1/Тим - коэффициент передачи. В такой структуре нестабильность характеристик ИМ заметно влияет на закон регулирования АР.
В электрических АР с обратной связью по положению ИМ (рис. 2.2, б) вариации статических и динамических характеристик УС, УМ и ИМ слабо влияют на фактический закон регулирования. Последний зависит от характеристик УС, ИМ и, главным образом, обратной связи ОС.
В некоторых электрических АР используют статические ИМ с передаточной функцией Wим(p)=kим, т.е. V1 = kимy. Такое соединение ИМ и OC1, называемое позиционером, при достаточно большом kим в области низких частот близко к усилительному звену. Для построения такого ИМ используют исполнительные механизмы с Wим(p)=kим/р охваченные местной отрицательной обратной связью OC1 (на рис. 2.2, в показано пунктиром). При этом закон регулирования АР фактически не зависит от динамических характеристик ИМ с местной обратной связью.
Электрические АР с заданным законом регулирования строят с помощью параллельно включенных корректирующих цепей, каждая из которых состоит из усилителя УС и функционального устройства ФУ (интегратор, дифференциатор, инвертор и т.п.). Выходные сигналы этих цепей вводят в дополнительный сумматор () и далее через усилитель мощности (УМ) на ИМ статического типа (рис. 2.2, в). В АР с параллельной структурой нет функциональной обратной связи, поэтому изменения динамических характеристик элементов УС, ФУ, существенно влияют на передаточную функцию всего регулятора.
Структуры электрических АР с позиционными законами регулирования обычно более просты, чем структуры линейных регуляторов. Например, структуры таких регуляторов (рис. 2.2, а) содержат лишь единственное усилительное звено УС, где отсутствует обратная связь ОС. В позиционных АР используют релейные элементы с мощными выходными сигналами. Для коррекции параметров настройки b и b1 релейных элементов иногда применяют местные обратные связи.
Конструктивное оформление электрических регуляторов. АР имеют различное конструктивное оформление: отдельные блоки регулятора размещают в одном или нескольких корпусах, предназначенных для щитового монтажа. Наиболее часто в одном корпусе компонуют измерительный и формирующий блоки. Такое устройство с маломощным аналоговым выходным сигналом называют корректирующим прибором, а при импульсном выходе - регулирующим прибором. Корректирующие приборы чаще всего применяют для построения многоконтурных АСР, например каскадных систем стабилизации.
Электрические регуляторы могут быть выполнены как единые функционально независимые устройства или как агрегатные комплексы специализированного или широкого назначения (например, типа АКЭСР, КТС ЛИУС, Каскад, Контур, КМ2201 и др.).
Агрегатные комплексы электрических средств автоматизации содержат независимые или встроенные блоки первичной обработки информации и ввода - вывода сигналов. Например, в состав комплекса АКЭСР различных модификаций входят блоки кондуктивного разделения БКР, ручного управления БРУ, ручного задания РЗД; функциональные блоки вычислительных операций БВО, селектирования БСЛ, нелинейных преобразований БИП, сигнализаций БСГ, прецизионного интегрирования БПИ, динамических преобразований БДП; группового питания БПГ, шкафного питания БПШ; сервисные испытания по месту ИПБ, настройки регуляторов УНП, импульсного регулирования РБИ, аналогового регулирование РБА и т.д.
Определение параметров настройки АСР с двухпозиционным регулятором.
Автоматическая система регулирования с двухпозиционным регулятором является наиболее характерным представителем нелинейных систем, основные особенности расчета которых и рассматриваются на их примере.
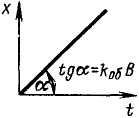
Если объект регулирования представляет собой интегрирующее звено с передаточной функцией
Wоб(р) = kоб/р, (2.10)
то при поступлении на вход объекта регулирующего воздействия хр = В регулируемая величина будет изменяться по линейному закону х = kобBt.
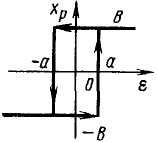
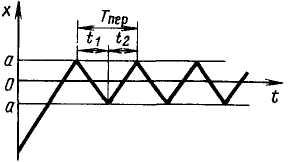
Если на вход объекта от регулятора будет подано воздействие хр = В, то регулируемая величина будет изменяться в обратную сторону по линейному закону х = kобBt. При этом в замкнутой АСР при релейной статической характеристике регулятора с зоной нечувствительности 2а в установившемся режиме возникнут устойчивые автоколебания (рис. 2.3).
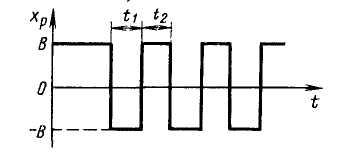
а б в г
Рис. 2.3. Переходные процессы в системе с двухпозиционным регулятором и объектом в виде интегрирующего звена: а – переходная характеристика объекта; б – статическая характеристика регулятора; в – изменение регулируемой величины; г – регулирующее воздействие регулятора
Формулы для расчета длительности амплитуд t1 и t2 автоколебаний, их периода Тпер, частоты переключений n регулятора, амплитуд x1 и x2 отклонения регулируемой величины от заданного значения и диапазона х колебаний
![]() . (2.11)
. (2.11)
Если объект более высокого порядка с достаточной для практических расчетов точностью представляется апериодическим звеном с запаздыванием
Wоб(р) = [kоб/(Тобр+1)]e-pоб, (2.12)
то диапазон колебаний регулируемой величины будет больше зоны нечувствительности регулятора, так как регулятор будет реагировать на фактические изменения регулируемой величины с запаздыванием об. При этом характер переходных процессов будет иметь вид, представленный 2.4.
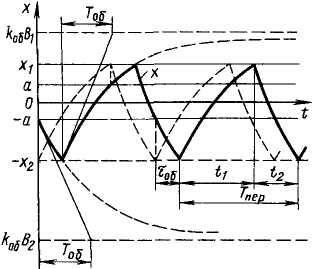
Рис. 2.4. Переходные процессы в системе
Wоб(р) = [kоб/(Тобр+1)]e-pоб при В1 В2 и а 0
Формулы для расчета длительности положительной t1 и отрицательной t2 амплитуд автоколебаний, их периода Тпер, частоты переключений n регулятора, положительной x1 и отрицательной x2 амплитуд отклонения регулируемой величины от заданного значения и диапазона х колебаний
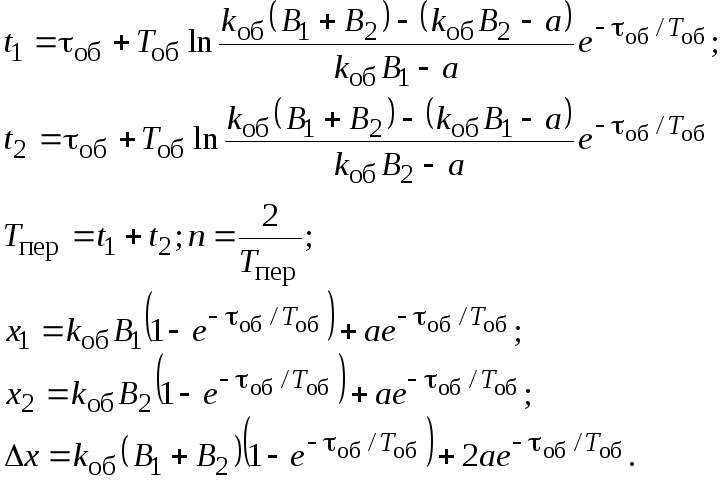 (2.13)
(2.13)
Так как при В1 В2 амплитуды автоколебаний не равны, то для обеспечения равенства амплитуд колебаний относительно заданного значения при практической настройке регуляторов следует скорректировать задание регулятору на величину
0 = kоб(В1 В2)об, (2.14)
для астатического объекта и на величину
0 = kоб(В1 В2)(1 – е–об/Tоб), (2.15)
для статического объекта.
Уменьшение зоны нечувствительности 2а приводит к уменьшению периода колебаний Тпер и увеличению числа переключений n регулятора. Повышение количества переключений снижает ресурс двухпозиционного регулятора. Уменьшение числа переключений возможно за счет уменьшения количества энергии, коммутируемой регулятором. Однако при этом следует иметь в виду, что регулирующее воздействие регулятора должно полностью компенсировать самые большие возможные возмущающие воздействия на объект.
Увеличение постоянной времени объекта при прочих равных условиях приводит к увеличению периода колебаний и уменьшению частоты переключений регулятора.
Уменьшение диапазона колебаний регулируемой величины при двухпозиционном регулировании возможно за счет уменьшения количества энергии, коммутируемой регулятором, в результате чего снижается скорость изменения регулируемой величины при переключениях регулятора. Улучшение качества двухпозиционного регулирования путем уменьшения количества коммутируемой регулятором энергии (или вещества) принято называть методом неполного притока или оттока.
Пример 2.1. Автоматическая система регулирования, представленная на рис. 2.5, осуществляет поддержание заданного уровня воды в резервуаре. В системе запаздывание отсутствует.
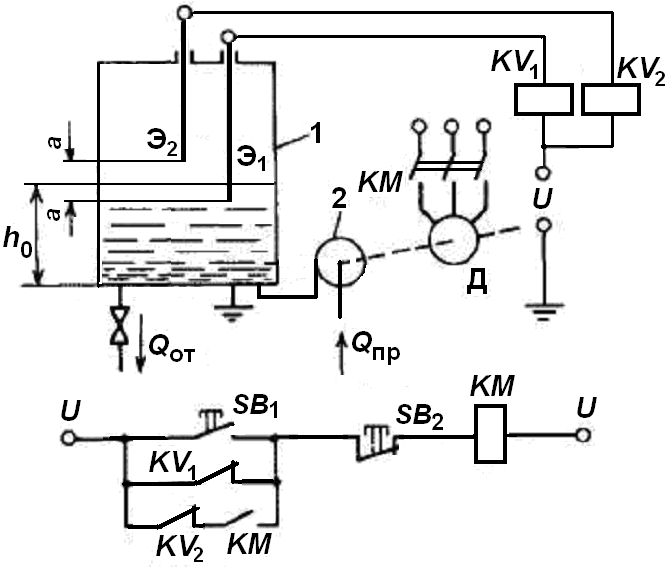
Рис. 2.5. Автоматическая система регулирования уровня двухпозиционным регулятором с зоной нечувствительности: 1 - резервуар; 2 - насос
Из резервуара вода подается к потребителю с помощью насоса, производительность которого Qот не зависит от уровня жидкости в резервуаре. Заданный уровень воды в резервуаре hзд = 5 м. Центробежный насос, подающий воду в резервуар, обеспечивает производительность Qзд пр, равную Qзд от при числе оборотов nзд, равном 50% номинального числа оборотов nном двигателя:
nзд = 0,5nном.
Коэффициент передачи объекта kоб = 10-3 с-1. Допустимое число включений двигателя m = 20 вкл/ч.
Требуется определить, на каком расстоянии относительно заданного уровня hзд необходимо установить контактные электроды.
Так как по условиям задачи производительности нагнетающего и отсасывающего насосов практически не зависят от уровня воды в резервуаре, то объект регулирования в динамическом отношении может быть представлен интегрирующим звеном с передаточной функцией Wоб(р) = kоб/р (2.10). В связи с тем, что производительность насосов пропорциональна числу оборотов, регулирующее воздействие регулятора в приращениях от заданного значения уровня
B1=k(nном - nзд) = k(2nзд - nзд) = knзд = B2 = В,
где k = 1 – коэффициент пропорциональности.
В относительных единицах регулирующие воздействия
B1=k(nном - nзд)/nзд = 1 = B2 = В.
Так как запаздывание в системе равно нулю, то при ограниченном числе включений двигателя двухпозиционный регулятор должен иметь статическую характеристику с зоной нечувствительности, не равной нулю (2а 0). Таким образом, параметры статической характеристики двухпозиционного регулятора следующие: B1 = B2 = В и а 0. Следовательно, процесс двухпозиционного регулирования объекта с передаточной функцией Wоб(р) = kоб/р необходимо рассчитывать по выражениям (2.11). Так как диапазон колебаний х = h = 2а, то из выражения для числа переключений n регулятора находим
h = 2а = kобB/n = kобB/2m.
Подставляя значения величин, находим диапазон колебаний уровня воды в резервуаре в относительных единицах:
h = 10-313600/220 = 0,09.
Диапазон колебаний уровня воды в резервуаре в абсолютных единицах
h = 0,09hзд = 0,095 = 0,45 м.
Таким образом, электроды в резервуаре должны быть установлены на отметках
h1= hзд - h/2 = 5 - 0,45/2 = 4,775 м; h2 = hзд + h/2 = 5 + 0,45/2 = 5,225 м.
Пример 2.2. Рассмотрим АСР температуры нагревательной электропечи, принципиальная электрическая схема которой приведена на рис. 2.6. Напряжение, снимаемое с автотрансформатора, Uавт = 150 В. Напряжение сети Uсети = 220 В. Сопротивление нагревательного элемента Н равно 900 Ом. Заданное значение температуры зд = 200 °С. Номинальное напряжение реле на выходе электронного усилителя Uном = 48 В. Напряжение срабатывания реле Uсраб = 0,85Uном. Коэффициент возврата реле kв = 0,7. Коэффициент передачи участка автоматической системы регулирования от объекта до входа электронного усилителя ЭУ (в абсолютных единицах) k = 2 В/°С. Передаточная функция электропечи определяется выражением Wоб(р) = [kоб/(Тобр+1)]e-pоб (2.12), где kоб = 12 с°С/Дж; Тоб = 600 с и об = 30 с.

Рис. 2.6. Регулирование температуры двухпозиционным регулятором с зоной нечувствительности
Требуется определить переходный процесс в системе.
При включении регулятора количество энергии Q1 в единицу времени, выделяемой нагревательным элементом, Q1 = Uавт/R = = 1502/900 = 25 Дж/с.
Найдем необходимое количество энергии для поддержания заданного значения температуры. Так как в установившемся состоянии зд = kобQзд, то
Qзд = зд/kоб = 200/12 = 16,7 Дж/с.
Находим регулирующее воздействие регулятора в относительных единицах при его включении
B1 = (Q1 - Qзд)/Qзд = (25 - 16,7)/16,7 = 0,5
и выключении
B2 = Qзд/Qзд = 1.
Зона нечувствительности регулятора
2а = (Uсраб - Uот)/k = (0,8548 - 0,85480,7)/2 = 6 °С,
или в относительных единицах
2а = 6/200 = 0,03.
Если при заданном значении температуры на вход объекта будет подано дополнительное воздействие Qзд, то новое установившееся состояние объекта будет определяться уравнением
зд = зд = kоб(Qзд + Qзд),
или с учетом того, что зд = kобQзд
зд = kобQзд.
Разделив и умножив левую часть этого равенства на зд, а правую – на Qзд и обозначив в относительных единицах = зд/зд и q = Qзд/Qзд, получим
= kобQздq/зд или = q.
Следовательно, коэффициент передачи электропечи в относительных единицах kоб = 1. С учетом этого по формулам (2.13) находим длительность включения нагревательного элемента:
![]() =
119 с.
=
119 с.
Длительность пауз
![]() =59
с.
=59
с.
Период колебаний
Tпер = 119 + 59 = 178 с.