

x : x E , x ,i ,..., , |
|
|||||||||||
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
x x x |
|||||||||||
|
|
|
||||||||||
|
|
|
|
|
x |
|
x |
|
|
|
||
X x x |
|
|
|
x . |
||||||||
|
|
|
|
|
|
|
|
|
|
|||
x x |
|
x |
|
x |
|
x |
||||||
|
|
|
|
|
|
|
||||||
|
x x x x x |
|
||||||||||
|
|
|||||||||||
Двойственная задача имеет вид
G λ max ,
λ
λ : λ E , |
i |
,i ,..., , |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
||||||||
|
||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
4.3.Методы решения задач линейного программирования
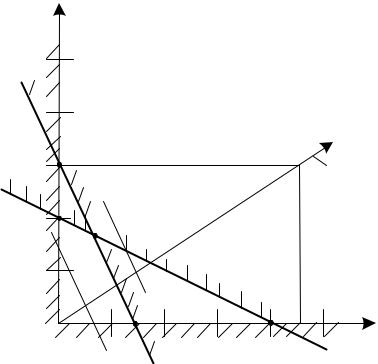
Если число переменных или число ограничений неравенств равно двум или трем, задачу возможно решить графически. Пусть
Q x cT x x |
|
x |
|
max , |
|
|
(4.12) |
||||
|
|
|
|
x X |
|
|
|
|
|||
X x : x E , x |
|
|
|
|
|
|
|
|
. (4.13) |
||
, x |
|
, x |
x |
|
, |
x x |
|
||||
|
|
|
|
|
|
|
|
|
|||
Первым шагом решения задачи является введение вспомогательных переменных с целью превратить неравенства в равенства. Для неравенств вида вводят неотрицательные переменные xn i (либо yi )
ai x ai x ... ain xn xn i bi ,
и для неравенств вводят неотрицательные переменные xn i (либо yi )
со знаком минус
ai x ai x ... ain xn xn i bi ,
где i – номер строки в системе ограничений.
Введение новых переменных приводит к увеличению числа переменных, но не меняет существа задачи.
Для нашего примера имеем
|
x x x , |
x , x |
|
(4.14) |
|
X |
x , x |
|
|
|
x x x , |
|
|
|
Число ограничений-равенств m , число неизвестных стало |
n , а |
|||
именно: |
x , x , x , x . Задача оптимизации имеет смысл, когда |
n m . Оче- |
||
|
94 |
|
|
|
видно, если бы m n , то данная система имела бы единственное решение. Поскольку m n , то система имеет бесчисленное множество решений, т.е. имеется бесчисленное множество наборов переменных xi , удовлетворяющих
данным уравнениям-неравенствам. Если n m переменных положить равными нулю, то система m m может дать решение, при условии, что ее определитель . Если определитель равен нулю, то можно приравнять нулю другие n m переменных и т.д. Если решение получено, то оно называется базисным, а набор m-переменных при котором получено решение называется базисом, переменные – базисными. Остальные же n m переменные называются небазисными или свободными переменными. Для нашего примера имеем m базисных переменных и n m -свободных переменных. Выразим (4.14) через переменные x и x и представим на плоскости
x x x . |
|
(4.15) |
x x x |
|
|
Полагая, что x , x находим |
x x , |
x x , |
которые представим на плоскости (рис. 4.2). Для построения первой полуплоскости (прямой) полагая x , находим из (4.15) x (точка А), далее
полагаем x , находим из (4.15) x (точка В). Аналогично для второй полуплоскости: x находим из (4.15) x (точка С), x находим из
(4.15) x (точка D).
x
10
x 8 

6 |
А |
|
|
|
|
|
|
|
|
|
|
направление |
|
|
|
|
|
|
|
|
|
С |
|
|
|
|
градиента |
|
|
|
|
|
|
|
4 |
Е |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
В |
|
D |
|
x |
|
0 |
|
|
|
|
|
|
2 |
4 |
6 |
8 |
x |
|
|
|
|
|
|
Рис. 4.2. Графическое решение задачи ЛП
95

Выделение допустимого множества Х (4.13). Ограничениям - неравенствам x и x соответствует первый квадрант (штрихуем недопусти-
мое пространство слева от оси x и снизу от оси x ). Полагая в первом неравенстве (4.13) x , x находим , т.е. неравенство выполня-
ется и следовательно, точка 0 (начало координат) лежит в допустимом пространстве относительно полуплоскости x . Поэтому штрихуем недопус-
тимое полупространство справа от x .
Аналогично для второй полуплоскости x берем точку 0 ( x , x ) и получаем, что второе неравенство (4.13) выполняется, и, следовательно, недопустимое пространство лежит справа от полуплоскости x .
Таким образом, допустимое множество Х (4.13) – это выпуклый многогранник ОВЕС.
Далее для решения задачи нам необходимо найти вектор градиента целевой функции
|
Q(x) |
|
|
|
||
|
x |
|
|
|
|
|
gradQ(x) |
|
(4.16) |
||||
|
|
. |
||||
|
Q(x) |
|
|
|
||
|
|
|
||||
|
x |
|
|
|
|
|
|
|
|
|
|
||
Из (4.16) следует, что градиент целевой функции постоянен в любой точке множества Х. Для удобства рисования умножим составляющие градиента на константу, например, 3 и представим направление градиента на рис. 4.2. Линии равного уровня целевой функции (4.12) будут перпендикулярны направлению градиента. Поскольку задача на max, то мы должны двигаться в направлении градиента до граничной точки (вершины) или отрезка (грани) множества Х. Из графика видно, что граничной точкой множества Х будет точка Е. Все последующие линии равного уровня целевой функции будут за пределами допустимого множества Х. Для решения задачи минимизации необходимо двигаться в сторону антиградиента, т.е. в сторону уменьшения гра-
диента (4.16).
В вершине Е пересекаются две прямые x и x , т.е.
x x
xx .
Решая эту систему уравнений совместно находим x* , x* , Q x* .
Следует особо подчеркнуть, что при графическом решении задачи масштаб осей x и x должен быть одинаковым, т.е. сетка должна быть квад-
ратной (регулярной).
96

Для прямой задачи (4.12) сформулируем двойственную задачу
G λ |
|
min , |
(4.17) |
|||||
|
|
|
|
|
λ |
|
||
|
|
|
|
|
|
|
||
|
, |
, |
||||||
|
|
|
|
, |
|
|
. |
|
|
|
|
|
|||||
|
|
|
|
|
|
|||
Решим прямую и двойственную задачу с использованием функций maximize и minimize (рис. 4.3).
Результаты (см. рис. 4.3) подтверждают теорему двойственности (4.8), |
||||
равенство Q x* , x* G * |
, * |
, а также выполнение теоремы о дополняющей |
||
|
|
|
|
|
нежесткости (4.9).
Полученное решение позволяет оценить чувствительность оптимального решения прямой задачи к изменению констант ограничений задачи в соответствии с (4.10).
Так, например, если бы константа b в первом ограничении прямой задачи изменилась с 6 до 8, то оптимальное значение целевой функции изме-
нилось бы на Q * |
b и новое оптимальное значение ста- |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ло бы равным |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Q(x1 x2) 3x1 2x2 |
- прямая задача |
|
|
|
|
|
|
||||||||||
x1 0 |
|
x2 0 |
- начальная точка поис ка (начало координат) |
||||||||||||||
Given |
|
x1 0 |
x2 0 |
2x1 x2 6 |
x1 2x2 8 |
|
|
|
|||||||||
xmax MaximizeQ( x1 x2) |
xmax |
1.333 |
|
0 |
1 |
10.667 |
|||||||||||
3.333 |
Q xmax |
xmax |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
G( 1 2 ) 6 1 8 2 |
- двойс твенная задача |
|
|
||||||||||||||
1 0 |
|
|
2 0 |
- начальная точка |
|
|
|
|
|
||||||||
Given |
|
|
1 0 2 0 |
2 1 2 3 |
|
1 2 2 2 |
|
||||||||||
min MinimizeG( 1 2 ) |
min |
|
1.333 |
G min0 |
min1 10.667 |
||||||||||||
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0.333 |
|
|
|
|
Проверка теоремы о дополняющей нежес ткос ти (4.9) для "ORIGIN=0" |
|||||||||||||||||
|
|
|
|
3 |
|
A |
2 |
1 |
|
6 |
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
b |
|
|
|
|
|
|
||||
|
|
|
|
2 |
|
|
1 |
2 |
|
8 |
|
|
|
|
|
|
|
|
CT minTA xmax 0 |
|
|
|
|
minT(b A xmax) 0 |
|||||||||||
Рис. 4.3. Решение прямой и двойственной задачи ЛП
97
4.4.Идея симплекс-метода линейного программирования
Симплекс-метод линейного программирования позволяет решать задачи с числом ограничений до нескольких тысяч. Алгоритм симплекс-метода ЛП относится к итерационным алгоритмам, обеспечивающим последовательное движение к экстремуму целевой функции от вершины к вершине. Рассмотрим последовательность этапов алгоритма симплекс-метода на конкретном примере [4].
Пример 4.2. Четыре предприятия П , П , П , П выпускают продукцию в объемах x , x , x , x . Необходимо составить план производства с целью по-
лучения максимальной прибыли (табл.4.2). |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Решение. Математическая модель задачи: |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
Q(x) x x x |
x |
max, |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x X |
|
|
|
|
x x x x , |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
x |
x x , |
|
|
|
|
|
|||||||||||||||||
|
x |
|
|
|
|
|
|||||||||||||||||||||
|
X |
|
|
x |
x x |
|
|
|
|
|
|
|
|
||||||||||||||
|
x |
, |
|
|
|
|
|||||||||||||||||||||
|
x , x |
|
, x |
|
, x |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 4.2 |
||
|
|
|
|
|
|
|
|
|
Условия задачи |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Ресурсы |
|
|
Норма расхода ресурсов |
|
|
|
|
Запас |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
П1 |
|
|
|
|
|
П2 |
|
|
|
|
|
|
|
|
|
П3 |
|
|
|
|
|
|
П4 |
ресурса |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Трудовые |
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
16 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Сырье |
6 |
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
3 |
|
110 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Оборудование |
4 |
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
13 |
|
100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Прибыль |
60 |
|
|
|
|
|
70 |
|
|
|
|
|
|
|
|
120 |
|
|
|
|
|
|
130 |
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
План |
x |
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
x |
|
- |
|
В ограничения задачи введем дополнительные переменные y , |
y , |
y и |
|||||||||||||||||||||||||
перепишем условие задачи в виде уравнений: |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
Q(x) x x x |
x |
max |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x X |
|
|
|
|
x x x x y , |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
x |
x x |
y , |
|
|
|
||||||||||||||||||
|
x |
|
|
|
|||||||||||||||||||||||
|
X x |
x |
|
x |
|
x |
|
y |
|
, |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
x |
j |
, |
j ,..., ; y |
i |
, i ,..., . |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
98 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Перепишем эти условия задачи в виде
Q(x) x x x x max,
x X
y x x x x , |
|
|
|
|
|
|
|||||||||
y |
|
x |
x |
|
x |
|
x |
|
, |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
X y |
|
x |
x |
|
x |
|
x |
|
, |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
x |
j |
, j ,..., ; y |
i |
, i ,..., . |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Здесь y , y , y – базисные переменные в первом решении; |
x , x , x , x – |
||||||||||||||
свободные переменные в первом решении.
Последнюю постановку можно представить в виде первой таблицы симплекс-метода (табл. 4.3).
Правила составления симплекс-таблиц. Для первой таблицы:
1) в первый столбец записывают yi – базисные переменные, которые
находятся в уравнениях слева;
2) свободные переменные x j , заключенные в скобках, выносят в верхнюю строку таблицы;
3)в остальные столбцы записывают коэффициенты перед свободными переменными;
4)индексная строка есть результат вычитания из нуля коэффициентов перед свободными переменными целевой функции.
Для последующих таблиц (табл. 4.3, 4.4, 4.5, 4.6):
Таблица 4.3
Первая симплекс-таблица
Базис |
Свободные |
|
Свободные переменные |
|
||
|
|
|
|
|||
члены |
x |
x |
x |
x |
||
|
||||||
|
|
|||||
y |
16 |
1 |
1 |
1 |
1 |
|
y |
110 |
6 |
5 |
4 |
3 |
|
y |
100 |
4 |
6 |
10 |
13 |
|
Индексная строка |
0 |
-60 |
-70 |
-120 |
-130 |
|
|
|
|
|
|
|
|
99
Таблица 4.4
Вторая симплекс-таблица
Базис |
Свободные |
|
|
Свободные переменные |
|
|
|
|
|
|
|
||
члены |
|
x |
x |
x |
x |
|
|
|
|||||
|
|
|
||||
y |
108/13 |
|
9/13 |
7/13 |
3/13 |
0 |
y |
1130/13 |
|
66/13 |
47/13 |
22/13 |
0 |
x |
100/13 |
|
4/13 |
6/13 |
10/13 |
1 |
Индексная строка |
1000 |
|
-20 |
-10 |
-20 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 4.5 |
|
|
|
Третья симплекс-таблица |
|
|
|
|
|
|
|
|
|
|
Базис |
Свободные |
|
|
Свободные переменные |
|
|
|
|
|
|
|
||
члены |
|
x |
x |
x |
x |
|
|
|
|||||
|
|
|
||||
y |
12 |
|
1 |
7/9 |
1/3 |
0 |
y |
26 |
|
0 |
-1/3 |
0 |
0 |
x |
4 |
|
0 |
2/9 |
26/39 |
1 |
Индексная строка |
1240 |
|
0 |
50/9 |
-40/3 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 4.6 |
|
|
Последняя симплекс-таблица |
|
|
||
|
|
|
|
|
|
|
Базис |
Свободные |
|
|
Свободные переменные |
|
|
|
|
|
|
|
||
члены |
|
x |
x |
x |
x |
|
|
|
|||||
x |
10 |
|
1 |
1/18 |
0 |
… |
y |
26 |
|
0 |
-1/3 |
0 |
… |
x |
6 |
|
0 |
13/6 |
1 |
… |
Индексная строка |
1320 |
|
0 |
70/9 |
0 |
… |
|
|
|
|
|
|
|
1)выбираем наименьший отрицательный элемент в индексной строке при отыскании максимума, но наибольший положительный – при отыскании минимума, исключая вектор свободных членов;
2)этот элемент определяет ключевой вектор-столбец, и он вводится в
базис (столбец x выделен жирно в табл. 4.3);
3)компоненты вектора свободных членов делятся на положительные элементы ключевого столбца (16/1, 110/3, 100/13);
100
4)из полученных отношений выбирается наименьшее (100/13);
5)вектор-строка, содержащая наименьшее положительное частное, – ключевая и выводится из базиса (строка y выделена жирно в табл. 4.3);
6)на пересечении ключевых строк и столбца находится разрешающий элемент ( эр табл. 4.3);
7)преобразование матрицы:
7.1.Каждый элемент ключевой строки делится на разрешающий элемент (100/13, 4/13,6/13, 10/13, 13/13). Полученные частные являются элементами ключевой строки следующей таблицы (строка x табл. 4.4).
7.2.Ключевой столбец в новой таблице – нули, за исключением разрешающего элемента.
7.3.Остальные элементы новой таблицы рассчитываются по схеме:
Эн Эс Э Э , Эр
где Эн – новый элемент; Эс – старый элемент; Э – элемент ключевой строки; Э – элемент ключевого столбца; Эр – разрешающий элемент.
7.4. Если нулевая строка (столбец) содержит нуль, то соответствующий столбец (строка) в новой таблице не изменится.
Пункты 1-7 повторяются до тех пор, пока в индексной строке не останется ни одного отрицательного элемента при отыскании максимума (но ни одного положительного при отыскании минимума).
Из последней таблицы (4.6) видно, что:
1) в столбце свободных членов все элементы положительны, это значит, что полученное решение является допустимым;
2)в индексной строке все элементы также положительны. Это значит, что полученное решение — оптимально, т.е. максимизирует целевую функ-
цию. При этом оптимальным планом будут величины: x* , x* (значит, они базисные); x* x* (так как они свободные), целевая функция
Q x* .
Из этой таблицы также следует, что базисная переменная y* , а свободные переменные y* y* , т.е. в оптимальном плане резервы трудовых ресурсов и оборудования равны нулю, так как они используются полностью. А резерв ресурсов сырья y* , что свидетельствует о его излиш-
ках.
Проверим решение задачи с использованием функции maximize (это не симплекс-метод).
101
Q(x1 x2 x3 x4) 60x1 |
70x2 |
120x3 130x4 |
|||
x1 0 |
x2 0 |
x3 0 |
x4 0 - начальная точка поис ка |
||
Given |
|
|
|
|
|
x1 x2 x3 x4 16 |
|
|
|||
6x1 5x2 |
|
4x3 |
3x4 110 |
|
|
4x1 6x2 |
|
10x3 13x4 100 |
|
||
x1 0 x2 |
0 |
x3 0 |
x4 0 |
||
|
|
10 |
|
|
|
x0 MaximizeQ( x1 x2 x3 x4) |
x0 |
|
0 |
Q x00x01x02x03 1.32 |
3 |
|
6 |
10 |
|||
|
|
|
|
|
|
|
|
|
0 |
|
|
Рис. 4.4. Решение примера 4.2
В системе Matlab используем функцию linprog, которая используется для решения задач линейного программирования вида
|
|
Q(x) cТ x max , |
(4.18) |
||
где X x : x En ,x |
|
|
|
x X |
|
min |
x x |
max |
, Ax b, A1x b1 . |
|
|
|
|
|
|
||
Обращение к функции
[x, Q]= linprog(C, A, b, A1, b1, xmin, xmax).
В функции linprog по умолчанию используется прямо-двойственный алгоритм, который одновременно решает прямую и двойственную задачу.
Результаты решения двойственной задачи на печать не выводятся. Если в списке options входных параметров свойств итерационных алго-
ритмов, определить для Large Scale значение off, то будет использоваться симплекс-метод линейного программирования. Более подробно о списке options смотри [8].
Если исходная задача на максимум, то вектор «с» вводим со знаком минус. Если одно из неравенств, или более, определено как , то соответствующая строка матрицы А и элемент вектора b умножаются на «-1», что соответствует изменению знака неравенства.
Для примера 4.2 решение представлено на рис. 4.5.
%Пример 4.2
A=[1 1 1 1;6 5 4 3;4 6 10 13]; b=[16;110;100]; c=[60;70;120;130]; xmin=zeros(4,1); [x,Q]=linprog(-c,A,b,[],[],xmin)
Рис. 4.5. Решение примера 4.2 в Matlab
102
prim4.2
Optimization terminated. x = 10.0000
0.0000
6.0000
0.0000
Q = -1.3200e+003
Рис. 4.5. Окончание
Изложенные этапы симплекс-метода заложены в стандартных программах метода. Заметим, что если бы искать оптимальное решение путем перебора всех вершин, то например, для n , m число вершин множе-
ства Х равно . При скорости вычисления целевой функции в вершине
сек, просмотр всех вершин займет время T лет.
Аналогично, если проводить оптимизацию классическими методами с использованием множителей Лагранжа, получим количество решений, совпадающей с количеством вершин. В симплекс-методе число шагов, необходимое для поиска решения N , m , где m – число равенств (т.е. окончательный вид канонической формы).
103