

1.2.3. Привод с бесступенчатым регулированием скорости
Основные достоинства приводов с бесступенчатым регулированием – повышение производительности обработки за счет точной настройки оптимальной по режимам резания скорости, возможность плавного изменения скорости во время работы, простота автоматизации процесса переключения скоростей. Для бесступенчатого изменения скорости применяют иногда фрикционные вариаторы, чаще – регулируемые двигатели. Принцип действия фрикционного вариатора поясним на примере простейшей лобовой передачи. При смещении ролика вдоль образующей диска изменяется величина радиуса, что позволяет изменять передаточное отношение. Однако при передаче вращения в вариаторе неизбежно возникает проскальзывание, так как только в одной точке скорость на поверхности диска совпадает со скоростью на поверхности ролика. Вверх от этой точки скорости на диске выше, чем на ролике, а вниз – ниже. Наличие проскальзывания приводит к изменению передаточного отношения вариатора и его изнашиванию.
Величина проскальзывания зависит от типа вариатора и увеличивается с увеличением передаточного отношения, поэтому для большинства типов механических вариаторов диапазон бесступенчатого регулирования R = 4-6. Следует учитывать также, что с увеличением передаваемой мощности уменьшается надежность механических вариаторов, поэтому их применяют только в приводах малых и средних по размерам станков.
Для бесступенчатого регулирования скорости в основном применяют двигатели постоянного тока с тиристорной системой управления. Эти двигатели все шире используют в станках с ЧПУ.
В таких двигателях диапазон регулирования скорости с постоянной мощностью лежит в пределах R = (Rд)p = 2,5-6 (иногда до 8-10), что не перекрывает всего требуемого диапазона регулирования на шпинделе с постоянной мощностью Rр. Частоты вращения при постоянном моменте (Rд)м регулируют в очень широком диапазоне. Перспективным является применение бесколлекторных электродвигателей постоянного тока, что повышает их надежность.
В приводе главного движения применяют и регулируемые за счет изменения частоты тока асинхронные электродвигатели, у которых
![]() ,
,
где f – частота тока; р – число пар полюсов; S – скольжение. Эти двигатели обладают высокой надежностью, жесткой характеристикой и обеспечивают регулирование с постоянной мощностью во всем диапазоне.
Так как диапазон бесступенчатого регулирования R механических вариаторов или диапазон (Rд)p регулируемых двигателей значительно меньше требуемого диапазона регулирования частот вращения шпинделя Rn или Rp при системах комбинированного регулирования, между устройством для бесступенчатого регулирования и шпинделем вводят обычно ступенчатую коробку. При этом должно выполняться условие
Rn = R Rк,
где Rк – диапазон регулирования коробки скоростей, т.е. коробку скоростей можно рассматривать как переборную группу, расширяющую диапазон регулирования привода, и можно записать
φк = Rк-1φ = R φ.
С учетом того, что при бесступенчатом регулировании φ 1, необходимо, чтобы φк = R. Следовательно,
![]() ,
,
окончательно
![]() ,
,
что позволяет определить число ступеней коробки скоростей
![]() или
или
![]() .
.
Вследствие переменного скольжения в электродвигателях, механических вариаторах, ременных передачах фактический диапазон регулирования бесступенчатого устройства может оказаться меньше R, поэтому во избежание разрыва бесступенчатого ряда оборотов на шпинделе принимают обычно φк = (0,94…0,97)R.
Если
коробка скоростей выполнена в виде
одной группы передач, то для привода
без перекрытия при zк
= 2 можно
обеспечить диапазон регулирования
![]() ,
еслиR
<
8; при zк
= 3
,
еслиR
<
8; при zк
= 3
![]() ,
если
,
если![]() (еслиR
> 2,8, то в приводе получается перекрытие
скоростей и
(еслиR
> 2,8, то в приводе получается перекрытие
скоростей и
![]() ).
).
Привод
с zк
= 4 = 20 ·
21
позволяет получить
![]() ,
еслиR
<
2,8 (при R
> 2,8 получается перекрытие и
,
еслиR
<
2,8 (при R
> 2,8 получается перекрытие и
![]() ).
).
При
вычислении zк
и округлении его значения в бóльшую
сторону перекрытие скоростей получается
автоматически. В качестве примера на
рис.12 изображены кинематическая схема,
график частот вращения и диаграмма
мощности привода с zк
= 3 при
![]()
![]() .
.
В
приводе получается перекрытие скоростей,
так как
![]() округлено
в большую сторону доzк
= 3.
округлено
в большую сторону доzк
= 3.
В многооперационных станках с числовым управлением иногда сокращают число ступеней скорости, округляя zк в меньшую сторону, что приводит к небольшому разрыву в средней части диапазона регулирования.
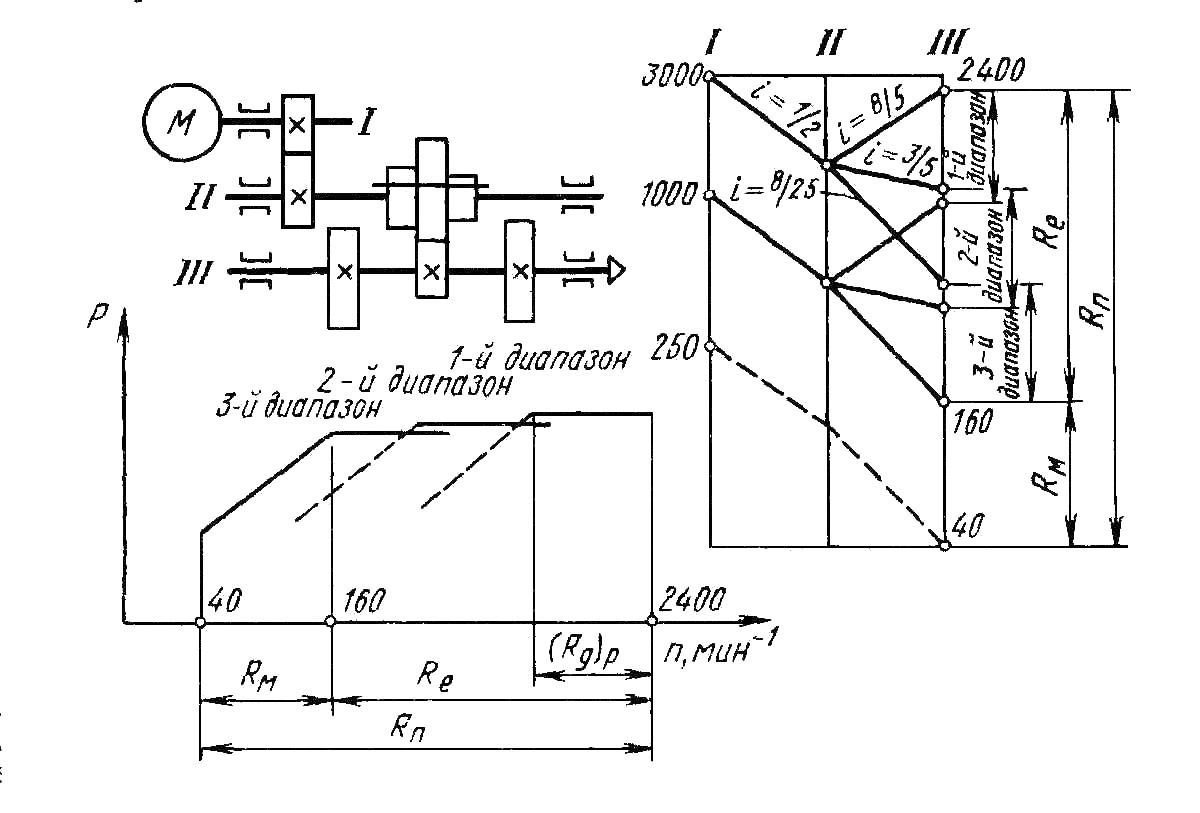
Рис. 12. Привод главного движения станка с регулируемым двигателем:
а– кинематическая схема;б– график частот вращения;в– диаграмма мощности
Если применен двигатель постоянного тока с двухзонным регулированием, то в этом интервале возможно регулирование частоты при постоянном моменте. На рис. 13 приведены график частот вращения и диаграмма мощности привода, построенного для предыдущего примера при zк = 2. Такой прием упрощает механическую часть привода, однако он возможен, если технологические операции, осуществляемые в средней части диапазона, не требуют полной мощности, либо их возможно осуществить на заниженных режимах обработки без существенного снижения производительности.
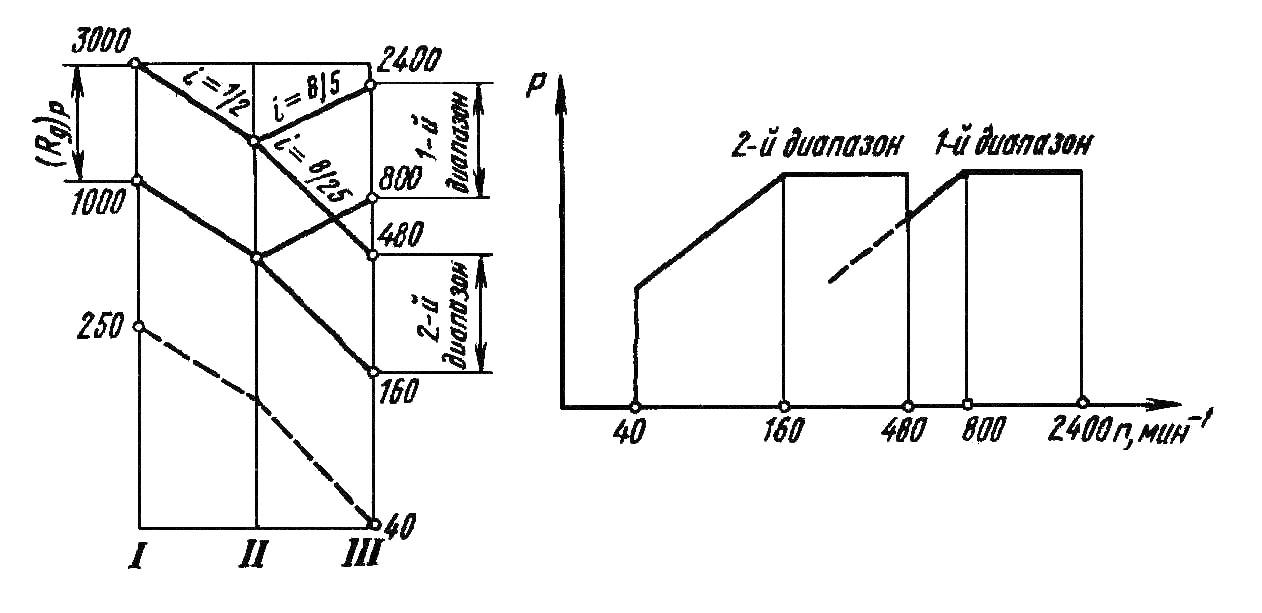

Рис. 13. Привод главного движения станка с регулируемым двигателем
при уменьшенном числе передач в коробке (zк = 2):
а– график частот вращения;б– диаграмма мощности
С ледует
учитывать, что в станках с числовым
управлением при применении двигателей
постоянного тока регулирование скоростей
часто ведется не бесступенчато, а
ступенчато с малым φ (обычно φ = 1,12, реже
φ = 1,06). В этом случае упрощается управление
приводом, а потеря экономически выгодной
скорости незначительна. Широко применяют
структуры с перебором, позволяющие
расширить общий диапазон регулирования
и получить другие преимущества,
свойственные этой структуре.
ледует
учитывать, что в станках с числовым
управлением при применении двигателей
постоянного тока регулирование скоростей
часто ведется не бесступенчато, а
ступенчато с малым φ (обычно φ = 1,12, реже
φ = 1,06). В этом случае упрощается управление
приводом, а потеря экономически выгодной
скорости незначительна. Широко применяют
структуры с перебором, позволяющие
расширить общий диапазон регулирования
и получить другие преимущества,
свойственные этой структуре.
На рис. 14 изображен график частот вращения привода главного движения многооперационного станка.