

Приводные элементы шпиндельных узлов в зависимости от класса точности станка
|
|
Тип привода |
Класс точности станка | ||||
|
Н |
П |
В |
А |
С | ||
|
1 |
Зубчатое колесо |
1 |
1 |
0 |
0 |
0 |
|
2 |
Клиноременная передача |
1 |
1 |
0 |
0 |
0 |
|
3 |
Зубчатоременная передача |
1 |
1 |
0 |
0 |
0 |
|
4 |
Поликлиновая передача |
1 |
1 |
1 |
0 |
0 |
|
5 |
Плоскоременная передача (шкив на шпинделе) |
1 |
1 |
1 |
1 |
0 |
|
6 |
Мембранно-торсионная муфта |
1 |
1 |
1 |
1 |
0 |
|
7 |
Электрошпиндель (мотор – шпиндель) |
1 |
1 |
1 |
1 |
0 |
|
8 |
Турбина воздушная, масляная |
|
|
|
1 |
1 |
|
9 |
Инерционный привод |
|
|
|
I |
1 |
На шестом этапе определяются расчетами следующие проектные параметры и критерии:
– расчет и выбор параметров опор (радиальной и осевой жесткости);
– расчет оптимального межопорного расстояния;
– расчет радиальной и осевой жесткости шпиндельного узла с выбранными параметрами;
– расчет расстояния от передней опоры до приводного зубчатого колеса.
По полученным параметрам прочерчивается узел с приводом и корпусом шпиндельной бабки. При этом конструктивно могут корректироваться параметры.
На седьмом этапе рассчитывается жесткость шпиндельного узла с полученными параметрами.
На восьмом этапе определяются динамические характеристики, точность опор и сопряженных деталей, допуски на размер посадочных поверхностей под опоры. Уточняются параметры уплотнений опор. Выбираются параметры системы смазки опор. Проводятся тепловой расчет и расчет долговечности опор. Расчет механизма зажима заготовки или инструмента. Уточняются габариты корпуса. При необходимости могут выполняться и другие расчеты.
На девятом этапе оформляется технический проект шпиндельной бабки, а затем рабочая документация.
1.2. Разработка кинематической схемы привода главного движения
С целью получения оптимальной скорости резания, значение которой может находиться в широких пределах от Vmin до Vmax, универсальный станок должен иметь бесступенчатое изменение частот вращения шпинделя. Однако из-за отсутствия технически простых и экономичных приводов бесступенчатого регулирования наиболее целесообразным пока является ступенчатое изменение частоты вращения шпинделя по закону геометрической прогрессии со знаменателем . В этом случае привод будет ступенчатым, состоящим из асинхронного двигателя и ступенчатой коробки скоростей.
1.2.1. Множительные структуры коробок скоростей
Регулирование скорости главного движения осуществляется при помощи коробок скоростей. Их конструируют в виде самостоятельных узлов или встроенными в корпусные детали, например, в станины, в шпиндельные бабки. Коробки скоростей современных, особенно универсальных станков, имеют большое число ступеней и большой диапазон регулирования скоростей. Они должны быть простыми и компактными, иметь малый вес, минимальное количество валов, передач, высокий КПД, низкий уровень шума. Конструкция коробок должна быть технологичной, надежной в эксплуатации, удобной в ремонте и в обслуживании.
Закономерность геометрического ряда частот вращения шпинделя позволяет проектировать коробки скоростей с наиболее простой структурой, состоящей из элементарных двухваловых механизмов, последовательно соединенных между собой в одну или несколько кинематических цепей. Такая структура называется множительной, так как кинематические условия настройки таких приводов определяются свойствами множительных групп передачи, а число скоростей получается путем перемножения чисел скоростей элементарных двухваловых передач.
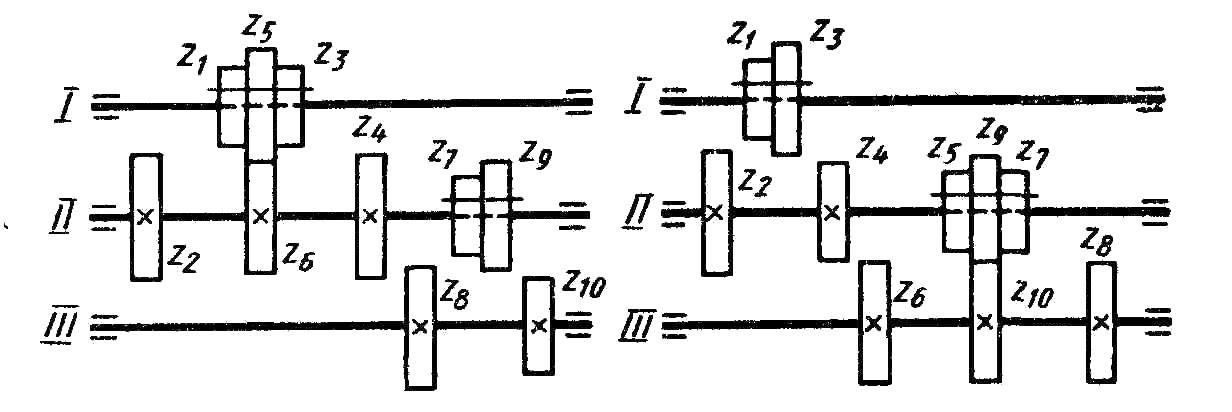
Рассмотрим для простоты устройство шестиступенчатой коробки скоростей (рис. 9, а). Для передачи вращения от вала I валу II служит множительный механизм с трехвенцовым блоком, а от вала II валу III – с двухвенцовым блоком. В результате последовательного соединения этих элементарных механизмов при одной скорости ведущего вала I ведомый вал III (или шпиндель) может иметь шесть различных скоростей.
-
а)
б)
Рис. 9. Кинематическая схема шестиступенчатой коробки скоростей
Совокупность передач, связывающих вращение двух соседних валов, образует группу передач. Ее характеризуют два показателя: количество передач в группе ри величины их передаточных отношенийi.
В рассматриваемой схеме даны две множительные группы: первая состоит из трех передач (z1 – z2, z3 – z4, z5 – z6), вторая – из двух (z7 – z8, z9 – z10). Порядок чередования групп вдоль кинематической цепи характеризует конструктивный вариант коробки. Его условно можно выразить в виде структурной формулы: z = 6 = 3 2.
На рис. 9, б представлена схема шестиступенчатой коробки скоростей, имеющей другой конструктивный вариант (порядок). Здесь в первой группе две передачи (z1 – z2, z3 – z4), a во второй группе – три (z5 – z6, z7 – z8, z9 – z10).
Структурная формула для этого варианта z= 6 = 2 · 3. В общем виде число ступеней скорости
![]() ,
,
где ра, рb, …, pm – число передач в первой, второй, …, m-й группах.
Количество конструктивных вариантов одной и той же структуры равно числу перестановок m групп, т.е.
![]() ,
,
где q – число групп с одинаковым количеством передач.
Для
нашего случая т
=
2, q
=
1, следовательно
![]() ,
аz
= 6 = 3
·
2
= 2
·
3.
Если принять
число передач в группах 2 и 3, то для
12-ступенчатой коробки z
= 12
= 3·2·2
= 2·3·2
= 2·2·3.
Так как т
=
3, q
= 2, то число конструктивных вариантов
,
аz
= 6 = 3
·
2
= 2
·
3.
Если принять
число передач в группах 2 и 3, то для
12-ступенчатой коробки z
= 12
= 3·2·2
= 2·3·2
= 2·2·3.
Так как т
=
3, q
= 2, то число конструктивных вариантов
![]() .
.
Передаточные отношения зависят от так называемой характеристики группы, обусловленной кинематическим порядком (вариантом) включения передач при переходе от одной частоты вращения шпинделя к другой.
Вернемся к рис. 9, а. Примем порядок включения: используем все три положения блока z2 – z4 – z6 сначала при левом положении шестерен z7 – z9, а затем при правом положении. Если п – частота вращения вала I, то ряд чисел оборотов вала III можно выразить следующими равенствами:
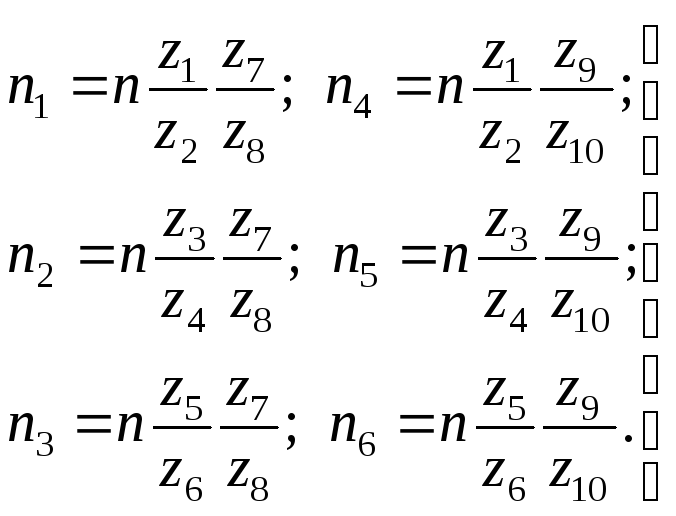
При последовательном переключении колес первой группы частота вращения вала III изменяется в φ раз. Переключение колес второй группы (c n1 на n4, c n2 на n5 или с n3 на n6) дает увеличение частоты вращения в φ3 раз. В общем случае при переключении передач в какой-либо группе частота вращения выходного вала (шпинделя) изменяется в φx раз. Показатель степени х называется характеристикой множительной группы передач. Для принятого нами кинематического порядка характеристика первой группы передач x1 = 1, а второй х2 = 3. Структурную формулу, уточняющую не только конструктивный, но и кинематический порядок, принято записывать так:
![]()
Здесь
место группы в формуле показывает
конструктивный порядок и номер группы,
а индекс – ее характеристику. Для нашего
примера z
= 6 = 3123.
Такая запись означает, что первая группа
имеет три передачи, а ее характеристика
x1
= 1; вторая группа – две передачи, а ее
характеристика х2
= 3. Группу передач, имеющую характеристику
х
= 1, называют основной группой, остальные
группы (с х
>1) – переборными. Величина х
в общем случае не может быть произвольной,
за исключением случаев, когда мы
искусственно изменяем характеристику.
Если первая группа является основной,
то характеристика последующих групп
равна числу ступеней скорости совокупности
групповых передач, кинематически
предшествующих данной группе. Это
положение представляется в следующем
виде. Если x1
= 1, то х2
= pa,
х3
= рa
pb…,
хm
= рa
pb…pm-1,
например, z
= 8 = 212224;
z
= 12 = 312326;
z
= 18 = 313329.
Возможны и другие кинематические
варианты, например, z
= 12 = 312623
= 233126
= 263123
= 232631
= 262331.
Общее их количество равно числу
перестановок из m
элементов, т.е.
![]() .
Для рассматриваемого случая (z
= 6) kкн
= 1·2 = 2. Общее количество возможных
вариантов (конструктивных и кинематических)
для обычных множительных структур
.
Для рассматриваемого случая (z
= 6) kкн
= 1·2 = 2. Общее количество возможных
вариантов (конструктивных и кинематических)
для обычных множительных структур
![]() .
.
Для
шестиступенчатой коробки скоростей
(см. рис. 9) m
= 2, q
= 1,
![]() ,
а варианты:z
= 6 = 3123=
2331
= 2132
= 3221.
,
а варианты:z
= 6 = 3123=
2331
= 2132
= 3221.