

15. Синтез аналоговых регуляторов
При синтезе САУ мы воспользуемся общепринятым упрощением, что можно пренебречь влиянием внутренней обратной связи по противо-ЭДС двигателя, добавив после завершения синтеза дополнительные регуляторы, которые учитывают влияние исключаемой ОС. В этом случае наша двухконтурная САУ будет иметь вид вложенных друг в друга контуров.
15.1 Синтез регулятора тока
Рассмотрим разомкнутый контур тока
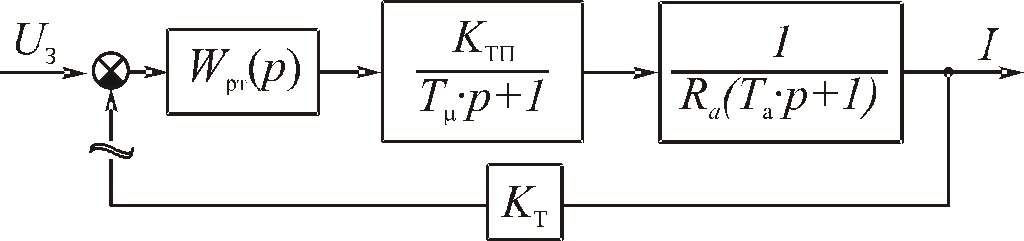
Рис. 20.
Определим передаточную функцию регулятора тока. В системе подчинённого регулирования эта функция должна иметь вид:
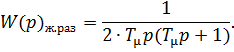
Такая функция получается при синтезе методом ЛЧХ с желаемым видом заданной части.
Передаточная функция разомкнутого контура тока:

Отсюда найдем реальную передаточную функцию регулятора тока:
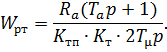
Эта передаточная функция описывает так называемый пропорционально-интегральный регулятор тока (ПИ-регулятор).
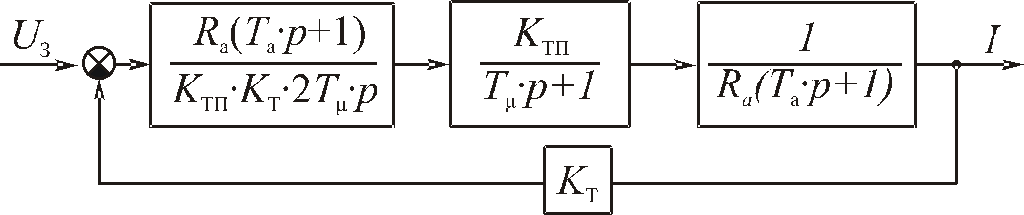
Рис. 21.
Структурная схема контура тока
Передаточная функция замкнутого контура тока будет иметь конечный вид:
Этот
контур обладает астатизмом первого
порядка относительно сигнала задания,
то есть в установившемся режиме ошибка
регулирования равна нулю. Установившееся
значение переходной функции равно ![]()
Так как моделирование системы автоматического управления будет осуществляться в компьютерной программе MatLab, то определим отдельные значения пропорциональной и интегральной частей регулятора:

15.2 Синтез регулятора скорости
После
синтеза регулятора тока приступим к
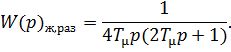
синтезу регулятора скорости. Для удобства
заменим контур тока передаточной
функцией ![]() ,
так как контур тока является вложенным
в контур скорости. Обратная связь по
противо-ЭДС будет полностью
скомпенсированной. Для упрощения синтеза
нагрузку на валу также учитывать не
будем.
,
так как контур тока является вложенным
в контур скорости. Обратная связь по
противо-ЭДС будет полностью
скомпенсированной. Для упрощения синтеза
нагрузку на валу также учитывать не
будем.
Рассмотрим контур скорости:
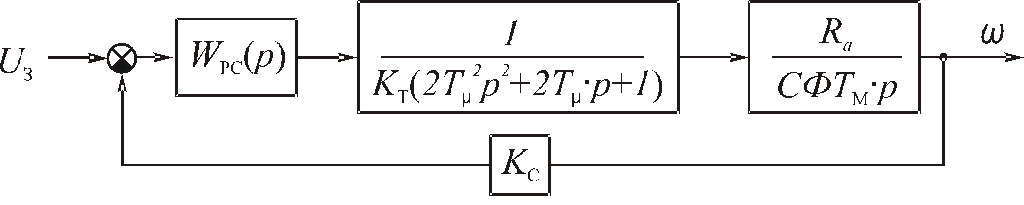
Рис. 22.
Звено второго порядка
упрощаем путём усечения – отбрасываем слагаемые с высшей степенью.
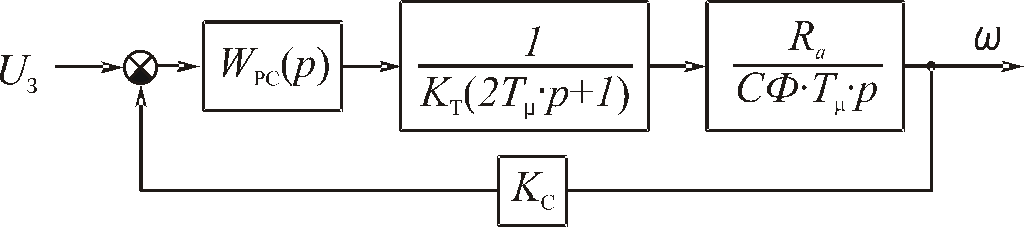
Рис. 23.
Определим передаточную функцию регулятора скорости. В системе подчинённого регулирования передаточная функция разомкнутого контура скорости должна выглядеть так:
Однако, реальная передаточная функция контура скорости имеет такой вид:

Отсюда:

Регулятор с такой передаточной функцией представляет из себя обычное безынерционное звено, а поэтому его называют пропорциональным регулятором или просто П – регулятором.
Найдём передаточную функцию замкнутого контура скорости:

Одного взгляда на структурную схему САР достаточно, чтобы понять, что она обладает астатизмом первого порядка по отношению к сигналу задания и нулевого – по отношению к возмущению. Для обеспечения должных порядков астатизма необходимо между точками приложения сигналов задания и возмущения поместить интегрирующее звено. Наиболее простой способ выполнения такого решения – замена П – регулятора на ПИ – регулятор. В результате такой замены запасы устойчивости САР не снижаются.
Пропорционально
– интегральный регулятор получается
путём последовательного соединения
интегрирующего звена и форсирующего
звена I
порядка. Постоянные времени у И- и Ф1-
звеньев равны ![]() ,
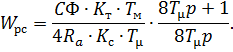
передаточная функция регулятора скорости
имеет вид:
,
передаточная функция регулятора скорости
имеет вид:
При применении такого регулятора скорости мы можем обеспечить требуемые порядки астатизма.

Рис. 24.
Конечный вид структурной схемы САР.
Найдём по схеме передаточную функцию:

Проверим устойчивости этой САР при помощи грубого алгебраического критерия:

Оба полученных коэффициента больше 2,25, поэтому можно сделать вывод, что система устойчива.
Выделим в регуляторе скорости отдельно интегрирующую и пропорциональную части:
