

Справочные данные выбранного трансформатора
|
Тип трансформатора |
Исполнение |
Сетевая обмотка |
Вторичная обмотка | |||
|
|
|
|
| |||
|
ТС3П – 160/0,7-УХЛ3 |
4 |
143 |
0,4 |
115 |
408 | |
|
Преобразователь |
Потери, Вт |
|
| |||
|
|
|
|
| |||
|
230 |
500 |
795 |
2400 |
4,5 |
5 | |
Рассчитаем значения сопротивления и индуктивности обмоток трансформатора
Определим номинальный ток, протекающей по первичной обмотке трансформатора
![]()
Определим полное сопротивление трансформатора
![]()
Определим активное сопротивление трансформатора

Вычислим
реактивное сопротивление и индуктивность
обмоток трансформатора пи условии, что
ток сети имеет частоту ![]()
![]()

Индуктивность якорной обмотки определим по формуле:
где
![]() - коэффициент, учитывающий наличие
компенсационной обмотки;
- коэффициент, учитывающий наличие
компенсационной обмотки;
![]() - число пар полюсов двигателя.
- число пар полюсов двигателя.
![]()
Определим необходимость наличия сглаживающего дросселя
Сглаживающий дроссель необходим, если не выполняется условие
![]() .
.
![]()
Определим индуктивность, ограничивающую пульсации тока

где
![]() – пульсность мостовой схемы тиристорного
выпрямителя,
– пульсность мостовой схемы тиристорного
выпрямителя,
![]() ,
,
![]()
![]()
![]() .
.
Условие выполняется, применение сглаживающего дросселя не требуется, однако, следует иметь в виду, что на строительной площадке, оборудованной недостаточно полно, может не оказаться нужного трансформатора (а иногда просто нет смысла его монтировать), то ток, получаемый на выходе преобразователя, будет иметь достаточно сильные пульсации, которые отразятся на стабильной работе двигателя. Для того чтобы избежать этой ситуации, установим сглаживающий дроссель. Побочный эффект такого дополнения – исключение режима прерывистого тока в преобразователе.
Определим критическую индуктивность:

где
![]() – пульсность мостовой схемы тиристорного
выпрямителя,
– пульсность мостовой схемы тиристорного
выпрямителя,
![]() -
требуемое значение граничного тока при
-
требуемое значение граничного тока при
![]() ,
,
![]() -
максимальный угол управления, рад.
-
максимальный угол управления, рад.
![]()
Минимальное значение добавочной индуктивности определим по выражению:
![]()
Выбираем
2 дросселя со следующими показателями:
![]() ,
,
![]() 0,0075
Гн; Суммарная индуктивность дросселей
0,0075
Гн; Суммарная индуктивность дросселей
![]()
Окончательно определим суммарные индуктивности и сопротивления
![]()
![]()
Полученное
значение учитывает сопротивление
двигателя и трансформатора (![]() ).
Пересчитаем значение сопротивления
якорной обмотки двигателя, приняв за
условие, что в процессе работы обмотки
разогрелись до
).
Пересчитаем значение сопротивления
якорной обмотки двигателя, приняв за
условие, что в процессе работы обмотки
разогрелись до ![]() .
.

9. Определение параметров сф, и , компенсация обратной связи по противо – эдс.
Так
как на оба конца входного вала установлены
одинаковые двигатели, то если пренебречь
заводскими отличиями, можно эти двигатели
считать абсолютно
одинаковыми, то есть ![]() ,
,
![]() ,
,
![]() .
.


![]()
Так
как ![]() ,
то мы вынуждены компенсировать влияние
противо-ЭДС. Для её компенсации введём
положительную обратную связь в цепь
регулятора тока.
,
то мы вынуждены компенсировать влияние
противо-ЭДС. Для её компенсации введём
положительную обратную связь в цепь
регулятора тока.


Данная обратная связь обеспечивает приближённую компенсацию по противо-ЭДС в переходных режимах и полную компенсацию в установившихся режимах.
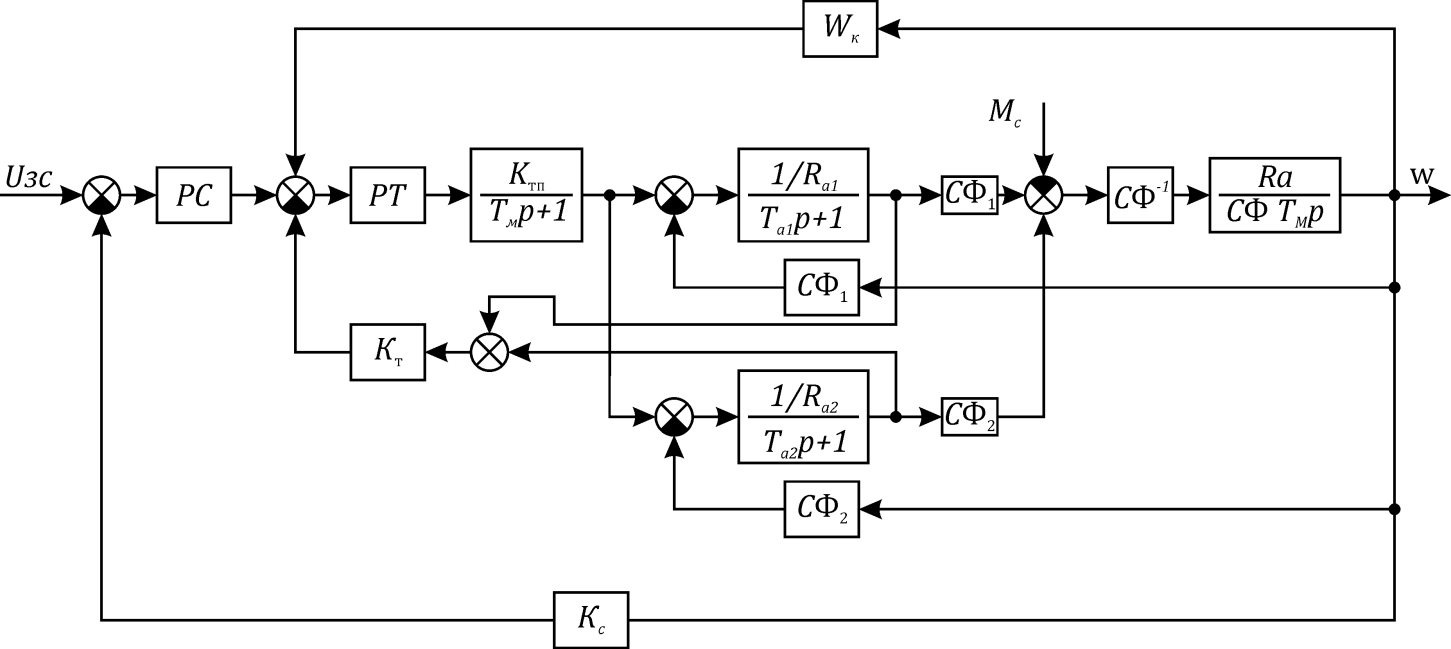
Рис. 8.
Структурная схема заданной части САР.