

1. Описание башенного крана кс – 5363 и технологического процесса в котором он участвует

Рис. 1
Кран КС - 5363 в рабочем (вверху) и походном (внизу) положениях
Для курсового проектирования был выбран полноповоротный кран на пневмоколёсном шасси грузоподъёмностью 30 тонн КБ – 5363. Этот кран оснащён выносными опорами, которые снижают удельное давление шасси на грунт, тем самым увеличивая грузоподъёмность крана и продлевая срок службы шасси, так как в шинах колёс отсутствует избыточное давление воздуха. Кран имеет достаточно хорошо оснащённую приборами кабину управления, которая имеет отличную обзорность, эти факторы позволяют максимально снизить психологическую нагрузку на оператора – крановщика и его утомляемость.
Кран оснащён комбинированным дизель-электрическим приводом и электро-гидравлическим приводом, благодаря чему обеспечивается высокая плавность всех движений. Кран предназначен для монтажа сборных железобетонных и стальных конструкций, технологического оборудования промышленных объёктов, для монтажа дорожных сооружений, а так же для погрузо-разгрузочных работ.
Лебёдка основного подъёма крана имеет обычную однодвигательную схему, в которой двигатель посредством муфты подсоединён к трёхступенчатому редуктору, выходной конец которого присоединён к барабану. Муфта, соединяющая двигатель и редуктор имеет фрикционную поверхность, облегчая работу тормоза, который удерживает груз и крюковую подвеску от произвольного движения, когда двигатель заторможен.
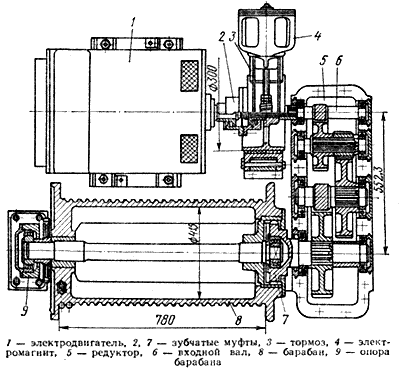
Рис. 2.
Схема лебёдки основного подъёма
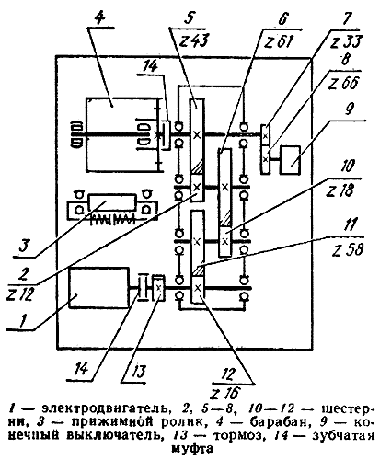
Рис. 3.
Кинематическая схема лебёдки главного подъёма
Данный привод требует глубокого регулирования скорости, именно поэтому он и был выбран для курсового проектирования.
2. Требования к системе управления электроприводом
К электроприводам подъемных кранов предъявляются наиболее жесткие требования. Использование специализированных систем регулируемого электропривода позволяет повысить скорости перемещения и точность останова груза, за счет ограничения рывка и ускорения обеспечить отсутствие ощутимых толчков при старте и останове, увеличить срок службы основных механических узлов – тяговых тросов, тормозных колодок, редукторов, подвески противовеса.
Подъемно-транспортные механизмы предъявляют к электроприводу ряд специфических требований:
способность развивать более чем номинальный вращающий момент во всем диапазоне изменений скорости, начиная с нулевой, и во всех четырех квадрантах плоскости механических характеристик как при использовании датчика частоты вращения (положения) ротора двигателя, так и в бездатчиковом варианте;
высокое быстродействие в процессах отработки возмущений, позволяющее «подхватывать» висящий груз при его растормаживании;
наличие задатчика интенсивности;
функция управления тормозом и возможность гибкого интегрирования электропривода в систему управления краном, подъемником или лифтом;
возможность торможения с рекуперацией энергии в питающую сеть;
предварительная настройка системы управления на параметры двигателя и коррекция настройки (адаптация системы) в процессе работы электропривода;
необходимый набор защит от перегрузок, способных привести к аварии.