

10. Расчёт датчика тока
Информация о величине тока якоря может быть получена путем непосредственного измерения этого тока, или путем измерения действующего значения фазового (линейного) тока на стороне переменного тока. В курсовом проекте выбираем вариант непосредственного измерения с помощью шунта, включаемого в якорную цепь (см. рис. 9). Шунты представляют собой калиброванные медные резисторы с малой величиной сопротивления. Шунты стандартизированы по номинальному току Iш, н и номинальному падению напряжения на сопротивлении шунта Uш, н; УГР – это устройство гальванической развязки.
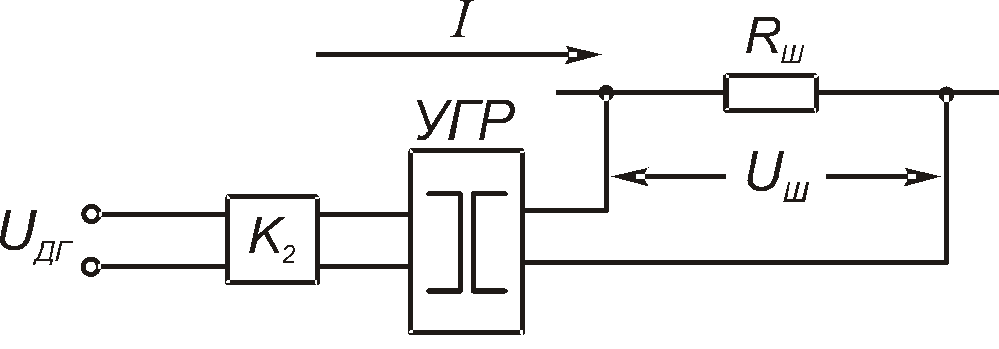
Рис. 9.
Схема измерения тока
Номинальное
значение тока якоря двигателя
![]() ,
перегрузочная способность
,
перегрузочная способность ![]() Так как шунт устанавливается перед
двигателями, через него протекает
двойной якорный ток, это нужно учесть
при выборе шунта.
Так как шунт устанавливается перед
двигателями, через него протекает
двойной якорный ток, это нужно учесть
при выборе шунта.
Выберем шунт из условия
![]()
![]()
Назначаем
шунт 75ШСМ, ![]()
![]()

Коэффициент датчика тока выбираем из условия:
![]()
где
![]() – перегрузочная способность для
двигателя серии Д.
– перегрузочная способность для
двигателя серии Д.
![]()
Так
как ![]() берём с некоторым запасом, примем
берём с некоторым запасом, примем ![]()
Максимальное
значение сигнала на выходе датчика тока
![]()
Так
как ![]() то датчик рассчитан верно.
то датчик рассчитан верно.
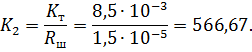
12. Расчёт датчика скорости
Датчик скорости (см. рис. 10) реализуется с использованием тахогенератора постоянного тока.
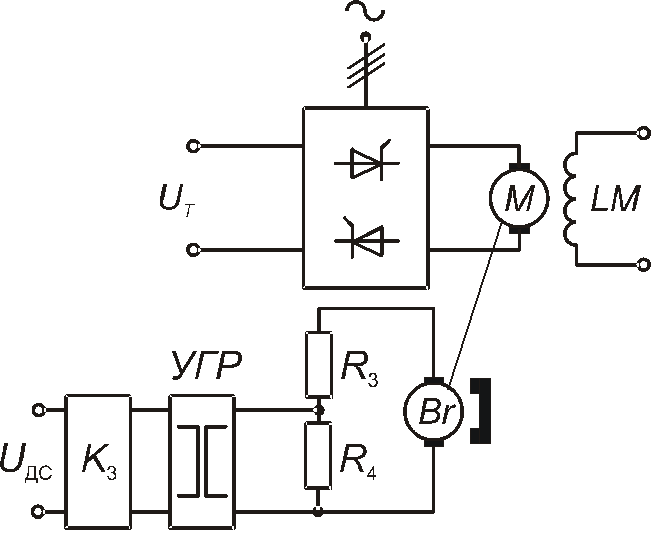
Рис. 10.
Схема измерения скорости
Номинальная
частота вращения двигателя ![]() ,
угловая скорость вращения
,
угловая скорость вращения ![]() ;
максимальная частота вращения. Так как
требуется обеспечить условие
;
максимальная частота вращения. Так как
требуется обеспечить условие ![]() ,
выбираем тахогенератор с
,
выбираем тахогенератор с ![]() типа ПТ–32-1.
типа ПТ–32-1.
![]() .
.
![]()
![]()
где
![]() - коэффициент передачи согласующего
усилителя.
- коэффициент передачи согласующего
усилителя.
![]() выбираем из условия
выбираем из условия
![]()
Принимаем
![]()
Определим значения сопротивлений:
![]()
Примем
![]() тогда
тогда
![]()
По
ряду Е24 примем ![]()
Пересчитаем
![]() .
.
Окончательно
принимаем ![]() .
.
Следовательно,
наибольшее значение сигнала обратной
связи по скорости равно ![]() ,
поэтому делаем вывод, что датчик скорости
рассчитан верно.
,
поэтому делаем вывод, что датчик скорости
рассчитан верно.
Все полученные данные о параметрах структурной схемы САР, полученные как в текущем, так и в предыдущих разделах занесём в таблицу.
Таблица 6
Параметры заданной части сар
|
Параметр |
Ra , Ом |
KT , Ом |
KC , Вб |
KТП |
СФ, Вб |
Та, с |
ТМ, с |
Т, с |
|
Значение |
|
0,0 |
0,18 |
23 |
|
|
|
0,01 |
13. Расчёт задатчика интенсивности
Задатчик (ЗИ) интенсивности устанавливается на входе САР скорости и предназначен для формирования сигнала задания на скорость. ЗИ ограничивает темп нарастания/снижения задания на скорость и тем самым обеспечивает, чтобы ускорение и динамический момент электропривода не превышали допустимых значений. Принципиальная схема ЗИ представлена на рис. 11.
При поступлении на вход ЗИ ступенчатого воздействия нелинейный элемент задатчика (усилитель 1) выходит на ограничение, и на вход интегрирующего звена (усилитель 2) поступает постоянный сигнал. На выходе интегратора появляется линейно возрастающий сигнал.
Рис. 11.
Чтобы ЗИ обеспечивал желаемую рабату электропривода, необходимо рассчитать его параметры, а именно значения сопротивлений и параметры интегратора.
Примем
значение ![]() ,
тогда
,
тогда
![]()
Так
как ![]() ,
то задав одно из значений, легко можно
рассчитать другое. Зададим
,
то задав одно из значений, легко можно
рассчитать другое. Зададим ![]() ,
тогда
,
тогда
![]()
Окончательно
принимаем ![]() ,
,
![]()
Так
как усилитель 1
работает в режиме компаратора, то он
должен иметь коэффициент усиления ![]() .
Принимаем
.
Принимаем ![]()
![]() ,
тогда
,
тогда ![]()
Усилитель
3
представляет собой обычный инвертор с
единичным коэффициентом передачи,
поэтому задаём ![]() .
.