

Расчет тахограмм
К кинематическому режиму предъявляются следующие ос- новные требования: обеспечение проектной производительности по всем операциям в заданный период времени; соблюдение требова- ний техники безопасности в отношении допустимых значений ки- нематических параметров; обеспечение экономичного рабочего ре- жима при наименьшей мощности двигателя.
Для обеспечения наивыгоднейшего режима при наименьшей возможной скорости vmax выбирают наибольшее возможное по пере- грузочной способности двигателя ускорение a1; замедление a3 при- нимают из условия свободного выбега системы при отключенном двигателе.
По допустимой перегрузочной способности двигателя дв ус- корение в период пуска
а1 (дв Fном.ор Fст.max ) / М ,
где дв = 1,6-2,0 в зависимости от типа подъемного двигателя, верх- ний предел – для постоянного тока; Fном.ор – номинальное ориенти- ровочное усилие двигателя, Н, по приближенной формуле
Fном.ор = 1000Nopред / vmax;
Fст.max – максимальное статическое сопротивление в период пуска (принимается по диаграмме Fст); М – приведенная масса движущих- ся частей, кг.
Замедление, обеспечивающее режим свободного выбега
а3 = Fст3 / М,
где Fст3 –статическое сопротивлениев третийпериод, принимается по диаграмме статических сопротивлений.
43
Ограничения на кинематические параметры приведены в табл.4. Рассмотрим расчет пятипериодной тахограммы для верти- кального подъема со скипами с донной разгрузкой. При этом внесем некоторые полезные для расчетной практики условности в оформление тахограммы. Так, например, под тахограммой рекомендуется преду- смотреть три строки для постановки значений t, a и h, что дает при расчете наглядное представление об исходных величинах (обведены
кружками) и величинах, требующих определения (рис.19, а).
Таблица 4
Кинематические параметры тахограмм для вертикальных подъемных установок
|
Параметр |
Численное значение |
Примечание |
|
Скорость, м/с: |
0,5 |
ПБ [11] |
|
выхода из разгрузочных кривых | ||
|
входа в разгрузочные кривые |
0,5 | |
|
Максимальная скорость: |
| |
|
для грузов |
Обосновывается проектом | |
|
для людей |
Не более 12 м/с |
|
|
Ускорение, м/с2: |
|
|
|
для грузов |
Обосновывается проектом |
|
|
для людей |
0,5-0,75 |
ВНТП1-92 |
|
Замедление, м/с2: |
|
|
|
для грузов |
Обосновывается проектом |
|
|
для людей |
0,75 |
ПТЭ [12] |
|
Продолжительность периода замедления |
| |
|
при ручном управлении, с |
3-5 | |
|
Продолжительность равномерного хода, % |
Не менее 50 |
Нормы для кинематических параметров наклонного подъема приведены в ПТЭ [12].
При проектных расчетах пятипериодных тахограмм извест- ны Н, ао, vmax, v3 и ho. Дополнительно задают следующие кинемати- ческие параметры: а1 – по условиям перегрузочной способности двигателя и а3 – из условий свободного выбега (если он возможен).
44
Остальные парамет- ры определяют расчетом по следующим формулам.
Продолжительность
начального
ускорения,
с,![]()
а
v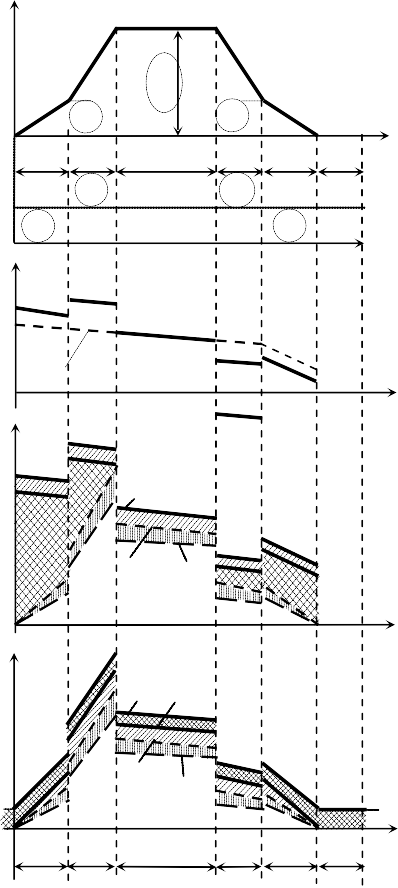
0 v1
t0 t1
v3
vmax
t2 t3
t4 Θ t
to =
2ho / ao .
а0 а1 –
а3 а4 –
Скорость выхода порожнего сосуда из раз-
б
Fcт
h0 h1 h2
F1
h3 h4 –
грузочных кривых, м/с,
v1 = aoto.
Продолжительность ускорения на нормальном участке, с,
t1 = (vmax – v1)/ a1.
Путь ускорения на нормальном участке, м,
h1 = (vmax + v1) t1 / 2.
Продолжительность конечного замедления, с,
t4 = 2h4 / v3.
Fдв
в 0
Nc Nдв Nб
г 0
Nc Nпр Nдв Nб
F0' '
F"0
Fст
F"1
F2'
Nc
Nдв
Nc
F"2
F3'
–F3'
Nб
Nпр
F"3
F4'
–F"3
F4"
t
t
Конечное замедле-
ние, м/с2,
a4 = v3 / t4.
Продолжительность
0
t0 t1
Nдв Nб
t2 t3
t4 Θ t
большого замедления, с,
t3 = (vmax – v3)/ a3.
Путь большого за- медления, м,
h3 = (vmax + v3)t3 / 2.
Путь равномерного хода, м,
h2 = H – (ho + h1 + h3 + h4).
Рис.19.
Диаграммы
для
скипов
с
донной
![]() разгрузкой:
а
–
скорости;
б
–
статических
разгрузкой:
а
–
скорости;
б
–
статических
сопротивлений и движущих усилий;
в – мгновенных мощностей при асинхронном приводе; г – то же при приводе
постоянного тока;
Nб – на валу барабана; Nдв – на валу двигателя;
Nс
–
потребляемая
из
сети;
Nпр
–
потребляемая
от
преобразователя;
![]() –
потери
в
редукторе;
–
потери
в
редукторе;
![]() –
потери
в
двигателе;
–
потери
в
двигателе;
![]() –
потери
–
потери
в реостатах или преобразователе
45
Продолжительность равномерного хода, с,
t2 = h2 / vmax.
Критерием правильности расчета, удовлетворяющим исход- ным для проектирования данным шахтной подъемной установки, служит суммарное время движения по расчетной тахограмме в се- кундах
n
ti t ,
i 0
где t – чистое время подъема (см. раздел 2.2).
Если это условие не соблюдено, то следует внести изменения в проведенные расчеты: ужесточить расчетные кинематические па- раметры, в первую очередь ускорение и замедление; увеличить мак- симальную скорость подъема; повысить грузоподъемность подъем- ного сосуда.
Серьезные переделкив расчет вносят второе и особенно третье из перечисленных изменений, что свидетельствует о крупных просчетах в принятых ранее решениях.
При расчете тахограмм могут быть заданы и другие кинема- тические параметры, например, чистое время подъема t, что обще- принято при проведении теоретических исследований кинематики шахтного подъема.
Рассмотрим особенности расчета семипериодной тахограммы. При существующей аппаратуре автоматизации управления, например, при аппарате задания и контроля (АЗК) изменение скорости, опреде- ляемое изменением радиуса программного диска, отрабатывается с достаточной точностью. Поэтому при необходимости достижения скорости дотягивания 0,5 м/с при использовании современных приво- дов постоянного тока (например, система ТП-Д), допускающих появ- ление малой ошибки лишь в период изменения скорости движения, оказывается достаточным увеличить путь дотягивания сверх высоты hо на величину, при прохождении которой ошибка компенсируется (hкомп = 0,5 м), что по времени составит 1,2 с.
Дляприводовпеременноготока с асинхронным двигателем,
имеющим более низкое качество регулирования, величина hкомп
должна быть принята равной 1-1,5 м, что по времени составит 2-3 с.
46
В этом случае величина пути дотягивания может быть вы- числена по выражению
где
hдот = ho – h4+ hкомп,
h4– путь стопорения, равный 0,2-0,3 м; ho – высота разгрузоч-
ных кривых.