

Особенности статики, кинематики и динамики подъема с противовесом
В связисналичием всистемеподъемаспротивовесом рабо- чего и холостого ходов полный цикл состоит из двух полуциклов. Это приводит к необходимости рассчитывать статические сопротив- ления, кинематические параметры и динамические усилия такого подъема по отдельным полуциклам, так как в зависимости от типа и конструкции подъемного сосуда может нарушаться идентичность обоих ходов по упомянутым факторам и параметрам. В частности, при скипе с донной разгрузкой рабочий ход содержит операцию частичной разгрузки сосуда (0,4gQ) в конце подъема на участке ho (рис.22, а). Холостой ход (спуск порожнего сосуда) отличается от рабочего тем, что частичная разгрузка отсутствует.
В силу указанных особенностей статики и кинематики сис- темы подъема с противовесом диаграммы движущих усилий в обоих полуциклах (рис.22, в) различны. Это необходимо учитывать при определении эффективного усилия двигателя ирассчитыватьего по диаграмме движущих усилий за полный цикл подъема.
Управление шахтным подъемом
Для надежной и безопасной работы подъемной машины пре- дусматриваются устройства защиты, блокировки, ограничители ско- рости, регуляторы расхода, устройства контроля проскальзывания канатов и путевые выключатели.
Устройства для контроля скольжения канатов отключают двигатель и включают предохранительный тормоз [12].
63
Путевые программные аппараты
Путевые программные аппараты выполняют следующие функции:
Выдают импульсы в отдельных точках пути движения со- судов для осуществления необходимых переключений в схеме управления шахтной подъемной машины.
Выдают сигналы сельсинному указателю глубины в зави- симости от положения сосудов.
Задают программу движения машины при автоматическом управлении.
Осуществляют контроль фактической скорости в период разгона и установившейся скорости.
Осуществляют контроль целостности кинематической це- пи передающее вращение от привода к валу шахтной подъемной машины.
В настоящее время практически все подъемные машины комплектуются аппаратами задания и контроля хода АЗК.
Аппарат азк
Конструктивной особенностью аппарата АЗК является сим- метричная схема приводного редуктора с независимой синхрониза- цией одной части относительно другой, что позволяет обеспечить пригодность аппарата для различных типов подъемных машин.
Аппарат АЗК состоит из следующих узлов:
шкаф ШПА-1, содержащий привод аппарата, блок сельси- нов-датчиков, блок этажных выключателей, корректирующее уст- ройство;
два блока БПМ и БПП разъездов на максимальной и пони- женной скоростях,содержащиередукторы, электромагнитные муф- ты и программные устройства;
два реле контроля вращения РКВ;
электрического ограничителя скорости ЭОС.
Шкаф с приводом ШПА и блок программирования БПМ и БПП монтируют на общей фундаментальной плите.
64
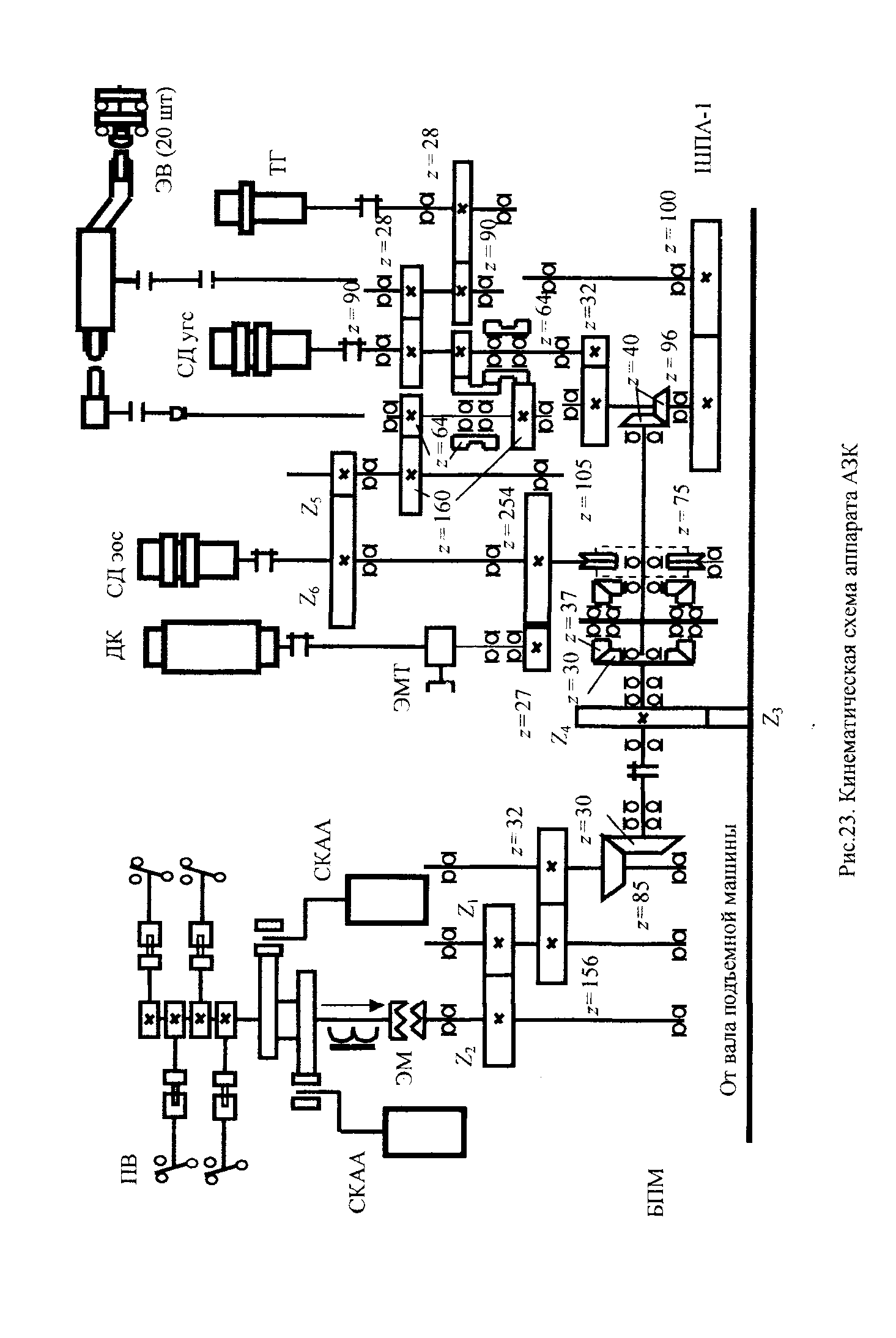
Кинематическая схема аппарата АЗК приведена на рис.23. На рис.23 видно, что шестерни z1, z2, z3, z4, z5, z6 подбираются в зави- симости от высоты подъема.
Проверку правильности выбора числа оборотов при одно- слойной навивке каната производят следующим образом:
определяют число оборотов тихоходного вала за подъем при однослойной навивке
n = H / Dб,
где Н – высота подъема, м; Dб – диаметр органа навивки, м.
шестерни z3 и z4 приводного редукторавыбирают из усло- вия получения числа оборотов за подъем входного вала не более 60 путем подбора из пар, приведенных ниже:
|
z3 |
28 |
36 |
46 |
57 |
69 |
81 |
92 |
102 |
110 |
|
z4 |
110 |
102 |
92 |
81 |
69 |
57 |
46 |
36 |
28 |
В шкафу ШПА расположен двигатель корректора ДК, пред- назначенный для согласования всех выключателей и профилей с по- ложением сосудов в стволе после остановки их в верхнем положе- нии. Еслиимело место проскальзывание каната (в малых пределах), связанное с «переползанием» каната, то замыкается контрольный выключатель, вызывающий включения двигателя корректора, кото- рый через дифференциал поворачивает валы АЗК до тех пор, пока они не вернутся в положение, соответствующее истинному нахож- дению подъемного сосуда на верхней приемной площадке. После этого корректор отключается.
Устранение перерегулирования, связанного с выбегом от- ключенного двигателя, производится наложением тормоза с элек- тромагнитным приводом ЭМТ, который растормаживает систему вместе с командой на запуск.
Блок сельсинов-датчиков включает в себя два сельсина БД-501 и два тахогенератора ТГ-2с.
Сельсин-датчик СДугс получает до 98,5 оборотов за подъем и предназначен для выдачи сигналов на сельсин-приемник указателя глубины УГС-4 на пульте оператора.
65
66
Вал сельсина-датчика СДэос электрического ограничителя скорости за путь замедления подъемной машины должен повернуться на угол 60-70о. Настройка этого узла производится подбором пары шестерен z5 и z6.
Ориентировочное число оборотов вала сельсина-датчика за подъем определяется по формуле
nвых = 0,2Н / hз,
где hз – путь основного замедления, м.
Стандартно используемые пары шестерен z5 и z6 приведены
ниже:
|
z5 |
36 |
44 |
58 74 |
92 |
112 |
132 |
150 |
166 |
180 |
188 |
|
z6 |
188 |
180 |
166 150 |
132 |
112 |
92 |
74 |
58 |
44 |
36 |
Тахогенератор ТГ, установленный в аппарате АЗК, исполь- зуется в системе контроля вращения для оценки целостности кине- матической цепи от вала подъемной машины к блокам тахогенера- торов и сельсинов АЗК. К реле РКВ подводится напряжение от двух тахогенераторов, один из которых получает вращение непосредст- венно от вала подъемной машины, а второй входит в комплект АЗК. При исчезновении напряжения одного из них, что свидетельствует о неисправности в кинематической цепи, в цепь защиты подъемной установки выдается аварийный сигнал.
Блок этажных выключателей служит для выдачи импульсов в зависимости от реального положения сосудов в стволе. Блок со- держит 40 этажных выключателей, по 20 в каждом блоке, из кото- рых 10 срабатывает при правом вращении и 10 – при левом. Каждый этажный выключатель имеет один замыкающий и один размыкаю- щий контакты.
Контакты располагаются на двух вертикальных валах, со- вершающих за один подъем различное число оборотов. На валах закреплены комплекты, состоящие из толкателей 1 и шарнирных рычагов 2 (рис.24). Поскольку валы вращаются с различными скоро- стями, то указанное на рис.24 положение рычаги занимают один раз за подъем. При этом толкатель нажимает на шарнирный рычаг, смещая его, что приводит к переключению контактной группы 3.
67
1
2
3
Рис.24.
Установка
этажных
выключателей
аппарата
АЗК![]()
1 – переключающие контакты; 2 – шарнирный рычаг; 3 – толкатель
Блок программирования БПМ осуществляет регулирование разгона и замедления подъемной машины в максимальной скорости, а блок БПП выполняет на пониженной скорости. Эти блоки имеют одинаковые конструкции. Разница в том, что за счет сменных шес- теренредукторблока БПМобеспечивает вращение профильных программных дисков от 0,89 до 21,1 оборота за подъем, а редуктор блока БПП – от 1,85 до 42,5 оборота за подъем. Пары шестерен бло- ков БПП и БПМ имеют параметры, показанные ниже:
z1 32 40 48 58 70 82 94 106 118 130 140 148 156
z2 156 148 140 130 118 106 84 82 70 58 48 40 32
Программные устройства блоков БПМ и БПП состоят каж- дый из двух программных дисков, расположенных на одном валу, двух командоаппаратов СКАА-111, четырех концевых микропере- ключателей и зубчатой электромагнитной муфты.
Один профильный диск обеспечивает задание ускоренного движения в начале подъема и замедления, в конце при движении вверх, а другой – для тех же целей при движении вниз.
Программные диски аппарата АЗК включаются только на период разгона и замедления. Для вращения от редуктора блока его вал соединяется с валом диска с помощью электромагнитной муфты посредством прижимных пружин. При подаче напряжения на об-
68
мотку муфты отжи- маются пружины, происходит расцеп- ление с редуктором и затормаживание
210
259![]()
профилированных дисков. Импульсы на срабатывание муфты подаются от
Ø40 Замедление
160
30
20
Нерабочая
путевых выключа-
телей, входящих в состав шкафа ШПА, либо от стволовых выключателей.
Разгон
Rmax
= 225
Rmin = 115
часть профиля
При враще- нии программный
Рис.25. Расчетная схема профилей программных дисков
диск отклоняет приводные рычаги командоаппарата, осуществляя вы- дачу командного сигнала, обеспечивающего заданную скорость электропривода в соответствии с выбранной тахограммой.
Таким образом, угол поворота диска пропорционален прой- денному пути, а мгновенный радиус – скорости в данной точке ство- ла. В этом случае можносчитать, что системауправления имеетоб- ратную связь по пройденному пути. Необходимые данные для рас- чета программного диска приведены на рис.25. Замена пар шестерен редуктора блока изменяет масштаб пути.
Для получения необходимого числа оборотов за подъем про- граммных дисков необходим подбор сменных шестерен редуктора блока из условия, что входной вал редуктора делает nф 60 оборо- тов за подъем. Тогда выходной вал должен сделать:
для блока БПМ
для блока БПП
nвых = nф
30 32 z1 ,
85 156 z2
55 z .
nвых = nф
1
133 z2
69
При подборе шестерен следует соблюдать условие
nвых.кор nнеобх,
причем
nнеобх = 0,89Н / (hp + hз),
где 0,89 – коэффициент использованияпрофиля; hр,hз – путиразго- на и замедления.
Располагается АЗК рядом с подъемной машиной и легко поддается наладке.