

Общая теория шахтного подъема с постоянным радиусом навивки
При эксплуатации шахтная подъемная установка совершает ряд повторяющихся операций, т.е. имеет циклический режим рабо- ты. Режим этот определяется, с одной стороны, статическими сопротивлениями на валу органа навивки, с другой, – предписанным изменением скорости. Совокупность двух указанных факторов предопределяет закон изменения движущего момента, развиваемого двигателем. Задачей теоретического расчета является установление параметров, характеризующих рабочий режим подъемной установки, с учетом взаимной связи между статикой, кинематикой и динамикой.
В соответствии с теорией подъема устанавливаются нагруз- ки, действующие на отдельные элементы и узлы шахтной подъем- ной машины. Конечным результатом теоретического расчета являет- ся определение экономических показателей подъемной установки.
Статические сопротивления при вертикальном подъеме
Статическое сопротивление – это разность статических на- тяжений грузовой и порожней ветвей канатов на окружности органа навивки:
Fст = Fст Fст. (18)
Принято рассматривать изменения статических сопротивле- ний в функциях пройденного подъемными сосудами пути x или вре- мени t. Наиболее простой вид эти зависимости имеют для неопро- кидных клетей.
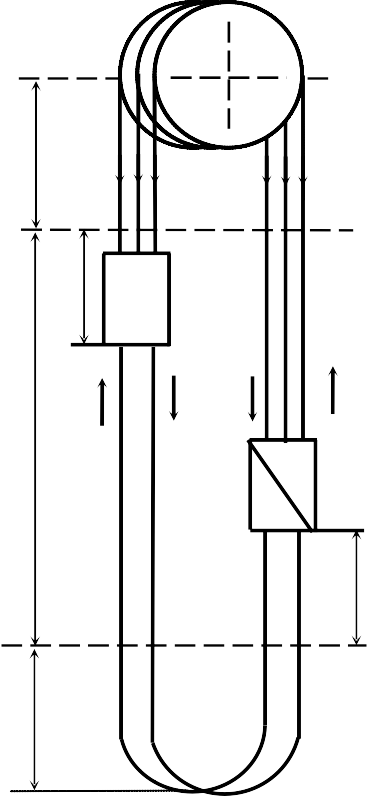
Для обобщения вывода уравнения статических сопротивле- ний в функции x рассмотрим случай многоканатной системы ТХК при подъеме груза. В соответствии с расчетной схемой (рис.10) для произвольного положения сосудов составим выражения статических натяжений обеих ветвей канатов, при этом обозначим сопротивления движению ветвей соответственно wи w. Вычтем из первого вы- ражения второе. Тогда
31
Fст
=
g[Q
+
Q+
np(h+
H
–
x)
+
+ nxpx(hx + x)] + w –
Fст=
Fс″т
h'
ВПП
Q′
x
w″ w′
H
Fс′т
n; p
Q+ Q′
= g[Q + np(h+ x) +
+ nxpx(H + hx – x)] – w;
Fст = g[Q + np(H – 2x) – nxpx(H – 2x)] +
+ w + w .
После преобразований и под- становки суммарного сопротивления обеих ветвей w = w+ wполучим
Fст =
= g[Q – (nxpx – np)(H – 2x)] + w. (19)
Обозначим сумму
НПП
hх
x
nх; pх
gQ + w = gQ(1 +
w ) = gkQ, gQ
Рис.10. Расчетная схема для определения статических
сопротивлений при двухсосудном подъеме
где k – коэффициент, учитываю- щий шахтные сопротивления, для скипов и клетей k соответственно равно 1,15 и 1,20.
Окончательное выражение для подъема груза при любой сте- пени уравновешенности системы следующее:
Fст = g[kQ – (nxpx – np)(H – 2x)]. (20)
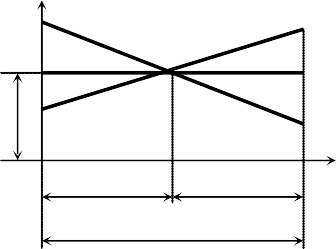
Статические сопротивления при системе ТХК в функции пу- ти имеют вид восходящей прямой (рис.11).
При равновесных хвостовых канатах в уравнении (18) следу- ет полагать nxpx = np, поэтому
Fст = kgQ. (21)
Статические сопротивления при этом остаются постоянными и не зависят от положения клетей в стволе (см. рис.10).
32
При подъеме без хвосто- вых канатов nxpx = 0, поэтому
Fст = g[kQ + np(H – 2x)]. (22)
Изменение статических сопротивлений при системе БХК происходит по нисходящей пря- мой (рис.11).
Fст
kgQ
0
ТХК
БХК
Н /2 Н /2
Н
РХК
x
При встрече подъемных сосудов в стволе, когда x = Н/2, для всех степеней уравновешен-
Рис.11. Диаграммы статических сопротивлений при неопрокидных клетях
ности
F = kgQ, что соот-
x H/2
cт |
ветствует точке пересечения всех графиков.
Сравнение графиков (рис.11)позволяетсделать следующие выводы:
При системе ТХК пусковое сопротивление в начале подъ- ема минимальное, в конце – максимальное, что в целом обеспечива- ет наивыгоднейшие энергетические показатели и более высокую степень безопасности в конце подъема, так как необходимое тор- мозное усилие при этом снижается.
При отсутствии хвостовых канатов (БХК-система) пуско- вое сопротивление максимальное, а в конце подъема – минимальное, что требует, как правило,увеличения мощностидвигателя. Необхо- димость применения больших тормозных усилий в конце подъема уменьшает безопасность и экономичность управления.
Применение системы РХК обеспечивает постоянство ста- тических сопротивлений на протяжении всего цикла, что упрощает управление как в ручном, так и в автоматическом режимах. При проектировании подъемных установок обычно ориентируются на системы с равновесными хвостовыми канатами.
Предельная высота подъема при неуравновешенной системе БХК определяется положением, при котором статические сопротив- ления переходят в область отрицательных значений. Отрицательные статические сопротивления играют роль движущих усилий, что не- приемлемо по соображениям безопасности, экономичности и на- дежности управления подъемной машиной.
33
Fст
0
Нпред x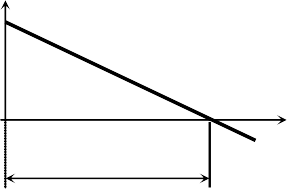
Предельная высота, при которой статические сопротивле- ния переходят через нулевое зна- чение, определяется из выражения (22), где Fст = 0, что соответствует Н = Нпред и x = Нпред (рис.12), тогда
Рис.12. Диаграмма статических сопротивлений для определения предельной высоты подъема
при статически неуравновешенной системе
Нпред = kQ / np.
Значение Нпред составляет обычно около 550 м. При боль- шей глубине стволов следует прибегать к статическому уравно- вешиванию за счет применения
Fст А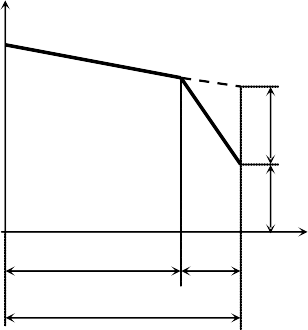
B C
0,4gQ
D
Fст к
уравновешивающих канатов либо переменного радиуса навивки. Более подробно этот вопрос рас- смотрен в работе [5].
При скипах с донной раз- грузкой Fст с начала подъема до момента входа ролика затвора
0 Н′ h0 x
Н
Рис.13. Диаграмма статических сопротивлений при скипах с донной разгрузкой
скипа в разгрузочные кривые длиной hо изменяется по тому же закону, что и при подъеме в неоп- рокидных клетях, т.е. по линии АВ (рис.13), поэтому для участка пути x = Н – hо применяется формула
клетевого подъема.
При определении положения точки D на графике (рис.13) учитывают, что в процессе движения в разгрузочныхкривых затвор скипаначинаетоткрываться и к моментуостановки скип разгрузит- ся приблизительно на 40 %. Это уменьшает статическое натяжение груженой ветви канатов по сравнению с клетевым подъемом на 0,4gQ (длина участка CD). Конечное значение статических сопротивлений при скипах с донной разгрузкой
Fст = g[(k – 0,4)Q + (nxpx – np)H]
или при k = 1,15
Fст = g[0,75Q + (nxpx – np)H].
34
Fcт![]()
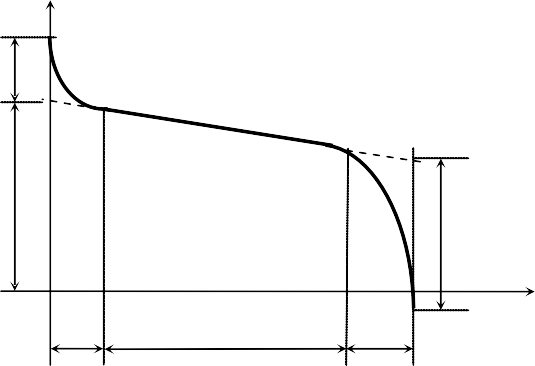
g(1 – н)Q'
g(kQ – ΔpH)
g[(1
–
н)Q'
+
Q]![]()
х
0 h0
H' = H – 2h0 h0
Рис.14.
Диаграмма
статических
сопротивлений
при
опрокидных
сосудах![]()
При опрокидных сосудах (клетях и скипах) искажение нор- мальных статических сопротивленийимеет место не только в конце подъема, на разгрузочном участке ho, но и в начале – на протяжении того же пути ho (рис.14). Это обусловлено тем, что верхний порож- ний сосуд находится в разгрузочных кривых и передает на них часть собственной массы (1 – н)gQ'. С учетом этого статические сопро- тивления в начале подъема
Fст = g[kQ – (nxpx – np)H + (1 – н) Q' ].
В период завершения подъема груженый сосуд входит в раз- грузочные кривые. С этого момента начинается поворот кузова и, наконец, высыпание груза. К концу подъема весь полезный груз вы- сыпается и вновь проявляется неуравновешенность собственной массы верхнего сосуда. Статические сопротивления в конце подъема
Fcтк = gkQ + (nxpx – np)H – [(1 – н)Q' + Q],
где (1 – н) – коэффициент неуравновешенности собственной массы сосудов, для опрокидных скипов и клетей н равно соответственно 0,65 и 0,6.
На протяжении нормального участка Н – 2hо – статические сопротивления изменяются также, как и при неопрокидных клетях.
35