

2. Метод Зейделя
Данный метод является модификацией
метода простой итерации и для системы
(25)
![]() имеет следующую технологию
имеет следующую технологию
 (32)
(32)
Суть его состоит в том, что при вычислении
очередного приближения
![]() в системе (32) и в формуле (27*), если имеет
место соотношение (27), вместо
в системе (32) и в формуле (27*), если имеет
место соотношение (27), вместо![]() используются уже вычисленные ранее
используются уже вычисленные ранее![]() ,
т.е. (27*) преобразуется к виду
,
т.е. (27*) преобразуется к виду
![]() ,i= 1, …,n. (33)
,i= 1, …,n. (33)
Это позволяет ускорить сходимость итераций почти в два раза. Оценка точности аналогична методу простой итерации. Схема алгоритма аналогична схеме метода простой итерации, если x0jзаменить наxjи убрать строкиx0i = 1,x0i=xi.
Пример.Методом Зейделя решить систему линейных уравнений с точностью= 0,0001, приводя ее к виду, удобному для итераций.

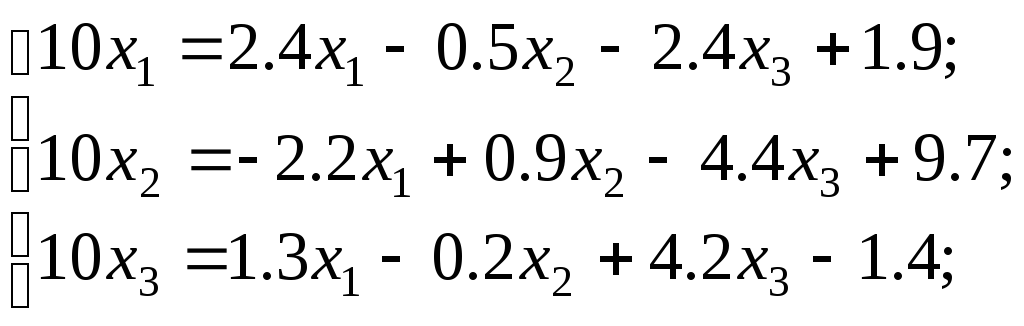
![]() (34)
(34)
Условия (27) для системы не удовлетворяются, поэтому приведем ее к виду соответствующему данному требованию.
![]()

 (35)
(35)

Здесь
![]() ,
значит, процесс Зейделя сходится.
,
значит, процесс Зейделя сходится.
По технологии счета (32)
![]()

|
k |
х1 |
х2 |
х3 |
k |
х1 |
х2 |
х3 |
|
0 |
0.19 |
0.97 |
–0.14 |
5 |
0.2467 |
1.1135 |
–0.2237 |
|
1 |
0.2207 |
1.0703 |
–0.1915 |
6 |
0.2472 |
1.1143 |
–0.2241 |
|
2 |
0.2354 |
1.0988 |
–0.2118 |
7 |
0.2474 |
1.1145 |
–0.2243 |
|
3 |
0.2424 |
1.1088 |
–0.2196 |
8 |
0.2475 |
1.1145 |
–0.2243 |
|
4 |
0.2454 |
1.1124 |
–0.2226 |
|
|
|
|
Ответ: x1 = 0.248;x2 = 1.115;x3 = –0.224.
Замечание. Если для одной и той
же системы методы простой итерации и
Зейделя сходятся, то метод Зейделя
предпочтительнее. Однако на практике
имеет место ситуация, когда области
сходимости этих методов могут быть
различными, т.е. метод простой итерации
сходится, а метод Зейделя расходится и
наоборот. Для обоих методов, если![]() близка кединице, скорость сходимости
очень малая.
близка кединице, скорость сходимости
очень малая.
Для ускорения сходимости тогда
используется искусственный прием –
так называемый метод релаксации.
Суть его заключается в том, что полученное
по методу итерации очередное значение![]() пересчитывается по формуле:
пересчитывается по формуле:
![]() (36)
(36)
– как правило, принято изменять в пределах 0 < 2 с каким-то шагом (можноh= 0,1 или 0,2). Параметрподбирают так, чтобы сходимость метода достигалась за минимальное число итераций.
Релаксация– (физ.тех.) постепенное ослабление какого-либо состояния тела после прекращения действия факторов вызвавших это состояние.
Пример. Рассмотрим результат пятой итерации с применением формулы релаксации. Возьмем = 1,5.

Как видно мы получили почти результат седьмой итерации.
2.3. Вычисление определителей высоких порядков
В отличие от технологии вычисления
определителей в методе Крамера, для
матриц общего вида, являющихся элементом
СЛАУ, для решения этой задачи успешно
может использоваться метод Гаусса.
Прямой ход метода для системы
![]() позволяет вычислить
позволяет вычислить
![]() ,
,
так как последовательное исключение элементов величину определителя не изменяет. Здесь аkk– элементы преобразованной матрицыА(прямой ход Гаусса). Знак зависит от четности или нечетности перестановок строк исходной матрицы при приведении ее к треугольному виду во избежание делении на «0» или необходимости поиска «max» ведущего элемента в текущем столбце на каждом этапе исключение неизвестных.
Для симметричных матриц
 ;
;![]() .
.