

6.2. Классический метод
Пусть система автоматического регулирования описывается линейным дифференциальным уравнением с правой частью
![]() ,
(6.1)
,
(6.1)
где р – оператор дифференцирования.
Решение этого уравнения можно представить в виде суммы частного и общего решений
![]() .
(6.2)
.
(6.2)
Первое слагаемое (6.2) называют вынужденным решением. В случае Хчастн(t) =constэто будет установившееся значение, а второе слагаемое – переходная составляющая
![]() . (6.3)
. (6.3)
Общее решение (переходная составляющая) находится из дифференциального уравнения (6.1) с правой частью, равной нулю
![]() . (6.4)
. (6.4)
Как уже указывалось выше, это решение определяется выражением (5.8). Полное решение в результате будет иметь вид
![]() , (6.5)
, (6.5)
где 1–n– корни характеристического уравнения
![]() , (6.6)
, (6.6)
соответствующего дифференциальному уравнению (6.1).
Таким образом, для отыскания полного
решения дифференциального уравнения
(6.1) необходимо найти частное или
вынужденное решение уравнения с правой
частью ХВ(t)
и определить корни характеристического
уравнения. Дальнейшим шагом является
отыскание произвольных постоянных
интегрирования С1– Сn.
Для этой цели используются начальные
условия: t = 0;![]() .
Начальные условия накладываются на
основании физических соображений или
находятся из дифференциального уравнения
(6.1). Дифференцируя уравнение (6.5) по
времени (n– 1) раз и
подставляя начальные условия, получаютnалгебраических уравнений
(исходное уравнение (6.5) и (n– 1) результатов дифференцирования),
куда входитnнеизвестных
– постоянных интегрирования. Совместное
решение этих уравнений даёт возможность
определить искомые постоянные
интегрирования С1– Сn.
.
Начальные условия накладываются на
основании физических соображений или
находятся из дифференциального уравнения
(6.1). Дифференцируя уравнение (6.5) по
времени (n– 1) раз и
подставляя начальные условия, получаютnалгебраических уравнений
(исходное уравнение (6.5) и (n– 1) результатов дифференцирования),
куда входитnнеизвестных
– постоянных интегрирования. Совместное
решение этих уравнений даёт возможность
определить искомые постоянные
интегрирования С1– Сn.
Операции вычисления корней и совместного решения nалгебраических уравнений являются трудоёмкими. Это особенно относится ко второй операции, так как вычисление корней может быть сделано довольно быстро приближенными методами. В связи с этим использование классического метода построения кривой переходного процесса ограничивается случаем сравнительно не высокого порядка дифференциального уравнения.
6.3. Метод трапецеидальных вещественных характеристик
Этот метод был разработан российским ученым В.В. Солодовниковым [6]. Он позволяет получить зависимость Х(t) по известной вещественной характеристике Р().
![]() .
(6.7)
.
(6.7)
О
Рис. 6.2. Единичная
трапецеидальная
вещественная характеристика
Единичная трапеция имеет высоту, равную единице, и частоту среза с, также равную единице. Единичная трапеция характеризуется частотой изломаd, которая может быть задана в виде коэффициента наклона боковой грани трапеции
![]() . (6.8)
. (6.8)
Для единичных трапеций с различным
коэффициентом наклона по выражению
(6.7) может быть вычислен оригинал, то
есть функция времени. Эта функция
получила название h-функции. В настоящее
время составлены подробные таблицы
h-функции для различных коэффициентов
наклона, лежащих в пределах
![]() .
В справочной литературе они обычно
имеют вид, аналогичный табл. 6.1. По такой
таблице для каждого коэффициента наклона
единичной трапеции можно построить
функцию времениh(t0)
(грубо – кривые переходного процесса,
соответствующие единичным трапецеидальным
вещественным характеристикам).
.
В справочной литературе они обычно
имеют вид, аналогичный табл. 6.1. По такой
таблице для каждого коэффициента наклона
единичной трапеции можно построить
функцию времениh(t0)
(грубо – кривые переходного процесса,
соответствующие единичным трапецеидальным
вещественным характеристикам).
Таблица 6.1
Общий вид таблицы h-функций
|
t0 |
h | ||||
|
0 |
0,1 |
0,2 |
… |
1 | |
|
0 0,1 0,2 … |
|
|
|
|
|
Метод построения кривой переходного процессазаключается в том, что имеющуюся вещественную характеристику исследуемой системы заменяют на ряд прямоугольных трапеций (рис. 6.3). Приближенная замена криволинейных участков характеристики прямолинейными отрезками осуществляется с соблюдением следующих условий.
1. Сумма высотвсех вписанных трапеций должна равняться суммарному изменению ординатывещественной частотной характеристики Р().
2. Боковые наклонные гранипрямоугольных трапеций должныкак можно точнеесоответствоватькриволинейным участкамхарактеристики Р().
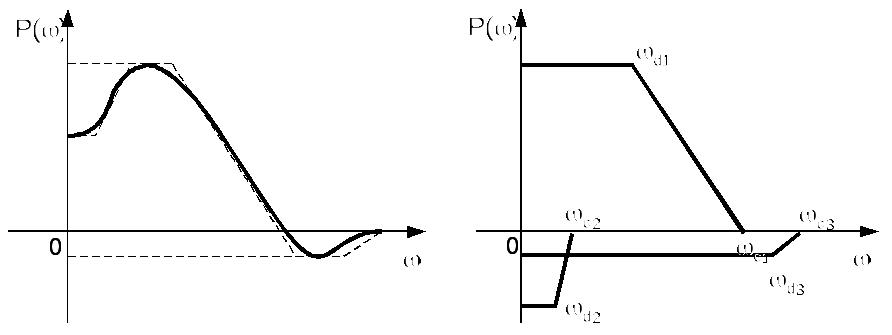
Рис. 6.3. Вписывание трапеций
Далее необходимо определить параметры всех полученных трапеций. Для этого выполняется вспомогательное построение всех трапеций на отдельной координатной сетке (аналогичной координатной сетке вещественной частотной характеристики системы), с учетом масштаба и знака. Увеличение ординаты P() соответствует отрицательным трапециям, а уменьшение – положительным. Для каждой трапеции определяют высотуp, частоты срезаси изломаd, по которым определяют коэффициент наклона трапеции.
Для коэффициента наклона по справочным таблицам h-функций, могут быть построены переходные характеристики для каждой трапеции. Построение осуществляется следующим образом.
1. По коэффициенту наклона не единичной трапеции в таблице h-функций выбирается ближайшая единичная трапеция h(t0).
2. Для получения точек, по которым можно построить составляющую кривой переходного процесса Xi(t) отне единичнойi-й трапеции, значение выбранной h-функции умножают на высоту трапецииp, а время из справочной таблицыt0делят на ее частоту срезас. Данное правило можно представить так:
![]() . (6.9)
. (6.9)
На основании таблиц h-функций, по правилу (6.9), для всех трапеций формируются расчетные таблицы Xi(t).
3. После создания всех таблиц выполняют построение графиков Xi(t) в одной координатной плоскости. Промежуток времени t во всех таблицах должен быть приблизительно равным. За этот промежуток все составляющиеXi(t) должны закончить существенные колебания по ординате.
4. На последнем этапе производят графическое суммирование всех составляющих для получения результирующей кривой переходного процесса X(t).