

8.2. Метод логарифмических амплитудных характеристик
Логарифмические амплитудные характеристики особенно удобны для целей синтеза, так как построение ЛАХ, как правило, может выполняться без вычислительной работы. Особенно удобно использовать асимптотические ЛАХ.
Процесс синтеза обычно включает в себя следующие операции.
1. Построение желаемой ЛАХпроизводится на основе тех требований, которые предъявляются к проектируемой системе регулирования. При построении желаемой ЛАХ необходимо быть уверенным, что вид амплитудной характеристики полностью определяет характер переходных процессов. Это будет выполняться в случае так называемых минимально-фазовых систем. В этом случае амплитудная характеристика однозначно определяет вид фазовой характеристики. Передаточная функция разомкнутой минимально-фазовой системы не должна иметь нулей и полюсов, расположенных в правой полуплоскости.
2. Построение располагаемой ЛАХ.Располагаемой ЛАХ является характеристика исходной системы регулирования, построенной на основании обеспечения требуемых режимов стабилизации или слежения, выходной мощности, требуемой скорости, ускорения и т. п. Обычно под исходной системой понимается система, состоящая из регулируемого объекта и регулятора и не снабженная необходимыми корректирующими средствами, обеспечивающими требуемое качество переходного процесса. Исходная система должна быть также минимально-фазовой.
3. Определение вида и параметров корректирующего устройства.Наиболее просто определяется корректирующее устройство последовательного типа. Если обозначить желаемую передаточную функцию разомкнутой системы как WЖ(p), располагаемую – WР(p) и передаточную функцию корректирующего звена последовательного типа – WКЗ(р), то можно записать равенство
![]() . (8.1)
. (8.1)
Откуда имеем
![]() .
(8.2)
.
(8.2)
Для ЛАХ по (8.2) можно записать
LКЗ() =LЖ() –LР(v). (8.3)
Таким образом, при использовании ЛАХ весьма легко осуществляется синтез корректирующих средств, так как ЛАХ корректирующих средств получается простым вычитанием ординат располагаемой ЛАХ из ординат желаемой.
4. Техническая реализация корректирующих средств. По виду ЛАХ в справочной литературе необходимо подобрать схему и параметры корректирующего звена последовательного типа. В случае необходимости последовательное звено может быть пересчитано на эквивалентное параллельное звено или эквивалентную обратную связь.
5. Поверочный расчет и построение переходного процесса.В случае необходимости полученная система регулирования вместе с корректирующими средствами может быть исследована обычными методами анализа.
8.3. Синтез последовательного корректирующего устройства
Рассмотрим краткое изложение метода синтеза, разработанного В.В. Солодовниковым [6].
В основу синтеза положено выполнение заданной величины следующих показателей качества:
1) перерегулирования σ, %, при единичном ступенчатом воздействии на входе;
2) времени переходного процесса tп;
3) максимального ускорения аmax, с которым изменяется регулируемая величина при заданном ступенчатом управляющем воздействииq0;
4) запаса устойчивости по фазе .
Построение желаемой ЛАХ.Желаемой LЖназывают асимптотическую ЛАХ разомкнутой системы, имеющей требуемые статические и динамические свойства. Желаемая ЛАХ (рис. 8.1) состоит из трех основных асимптот (частей): низкочастотной, среднечастотной и высокочастотной. Кроме того, могут быть сопрягающие асимптоты, которые соединяют основные.
Желаемая ЛАХ строится на основании требований к системе. Ранее было выяснено, что низкочастотная часть ЛАХ разомкнутой системы определяет статические свойства. Среднечастотная часть ЛАХ разомкнутой системы и ее сопряжение с низкочастотной определяют динамические свойства системы – устойчивость и показатели качества процесса регулирования.
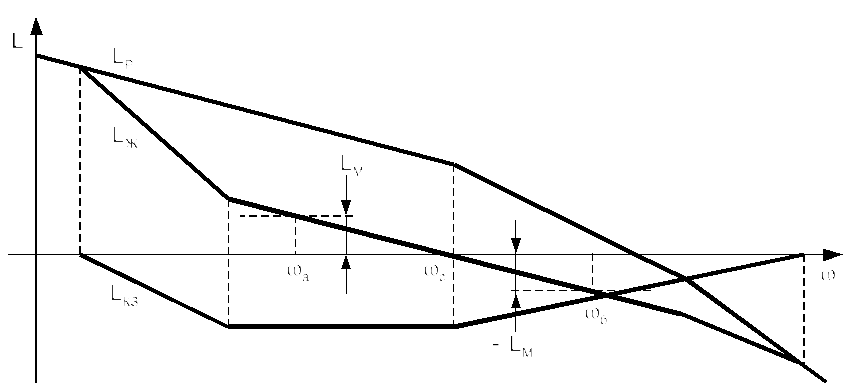
Рис. 8.1. Построение желаемой ЛАХ
Рис. 8.2. Номограмма
1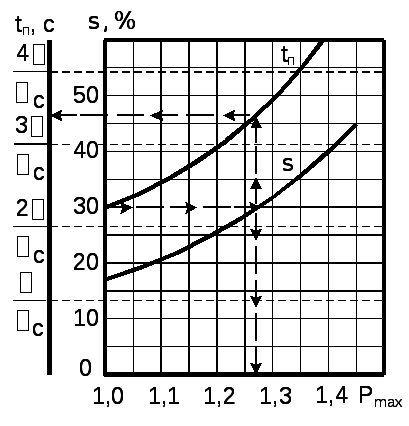
Построение среднечастотной части желаемой ЛАХ начинают с выбора частоты среза с(рис. 8.1), для этого используется номограмма 1 (рис. 8.2), составленная В.В. Солодовниковым.
Она определяет зависимость перерегулирования σ и времени переходного процесса tпот максимума (пика) Рmaхвещественной частотной характеристики замкнутой системы, причем время переходного процесса tпдано в виде функции частоты срезас.
Номограмма используется следующим образом. По заданному значению перерегулирования σ определяют значение Рmax, затем по Рmax определяют соотношение между tпис, то есть
![]() ,
(8.4)
,
(8.4)
где с – числовое значение по оси ординат номограммы 1.
На рис. 8.2 показано, как по значению
σ = 30 % определено Рmax= 1,27
и![]() .
.
Из (8.4) вычисляем частоту среза с1, при которой время регулирования не превысит заданного значения (это обеспечивает номограмма 1).
Если при начальном воздействии q0ускорение регулируемой величины ограничивается значением аmax, то частота среза не должна быть большес2, то есть
![]() .
(8.5)
.
(8.5)
Частота среза с2соответствует оптимальному переходному процессу при допустимом ускорении аmax.
Таким образом, частота среза должна быть выбрана по одному из следующих условий:
![]() . (8.6)
. (8.6)
Чем больше с, тем меньше время регулирования. Однако если,с2< с1, тосне должна быть больше значенияс2. В этом случае требование в отношении времени переходного процесса, возможно, не будет выполнено.
Среднечастотная часть желаемой ЛАХпроводится через точкусс отрицательным наклоном –20 дБ/дек. При большем наклоне трудно обеспечить необходимый запас устойчивости и допустимое перерегулирование.
Протяженность среднечастотной части устанавливается исходя из необходимого запаса устойчивости. Из этих же соображений выбирают способ ее сопряжения с низкочастотной частью распологаемой ЛАХ. Кроме того, сопрягающую асимптоту следует выбирать так, чтобы характеристика LЖкак можно меньше отличалась от LР, и ЛАХ корректирующего устройства была более простой.
П
Рис. 8.3. Номограмма
2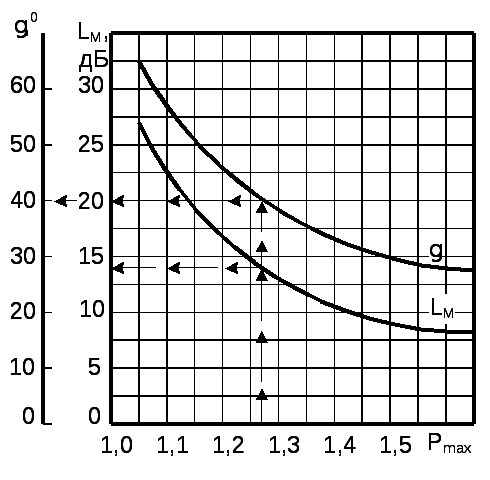
Избыток фазы должен быть обеспечен на том участке характеристики LЖ, для которого справедливо неравенство
![]() . (8.7)
. (8.7)
Этот участок охватывает среднечастотную асимптоту и, возможно, часть сопрягающей асимптоты.
Сопряжение желаемой и распологаемой ЛАХ в низкочастотной областипроизводится следующим образом: сначала откладывается ордината LМ(пунктир на рис. 8.1), затем наносится спрягающая прямая. Если наклон низкочастотной части ЛАХ составляет 0 дБ/дек или –20 дБ/дек, то наклон сопрягающей прямой выбирают равным –40 дБ/дек или –60 дБ/дек. Начинать ее можно из точки среднечастотной части ЛАХ с ординатой LМ.
После этого нужно проверить избыток
фазы
![]() при частотеа,
где ордината LЖравна LМ(см. рис 8.1). Значение
при частотеа,
где ордината LЖравна LМ(см. рис 8.1). Значение![]() подсчитывается по приближенной формуле
подсчитывается по приближенной формуле
 , (8.8)
, (8.8)
где – порядок
астатизма проектируемой системы;i– сопрягающие частоты, меньшиеа,
при которых наклон LЖувеличивается на 20 дБ/дек; k – число
сопрягающих частотi;j
– сопрягающие частоты, меньшиеа,
при которых наклон Lж()
уменьшается на 20 дБ/дек;![]() – число сопрягающих частотj.
– число сопрягающих частотj.
Если избыток фазы
![]() оказывается меньше необходимого, то
сопрягающую асимптоту следует переместить
влево. В противном случае (при слишком
большом избытке фазы) сопрягающая
асимптота перемещается вправо. Чем
больший диапазон частот занимает
низкочастотная часть ЛАХ, тем лучше
система воспроизводит низкочастотные
изменения управляющего воздействия.
оказывается меньше необходимого, то
сопрягающую асимптоту следует переместить
влево. В противном случае (при слишком
большом избытке фазы) сопрягающая
асимптота перемещается вправо. Чем
больший диапазон частот занимает
низкочастотная часть ЛАХ, тем лучше
система воспроизводит низкочастотные
изменения управляющего воздействия.
Высокочастотная часть желаемой ЛАХмало влияет на свойства системы. Поэтому ее следует выбирать так, чтобы корректирующее устройство было возможно более простым. Это достигается при совмещении высокочастотных частей характеристик LЖи LР. Если совмещение не удается, то высокочастотная часть желаемой ЛАХ должна иметь тот же наклон, что и высокочастотная часть распологаемой ЛАХ.
После выбора высокочастотной части
желаемой ЛАХ и сопряжения ее со
среднечастотной частью следует проверить
избыток фазы
![]() при частотеб,
где ордината характеристики LЖравна минус LМ.
Это можно сделать по следующей формуле
при частотеб,
где ордината характеристики LЖравна минус LМ.
Это можно сделать по следующей формуле
![]() ,
(8.9)
,
(8.9)
где qcp – относительный наклон среднечастотной асимптоты (при наклоне –20 дБ/дек qcp= 1);r– сопрягающие частоты, большие частоты среза ωс;m– число частотr.
Если
![]() меньше требуемого значения, то
высокочастотную сопрягающую асимптоту
желаемой ЛАХ нужно переместить вправо.
меньше требуемого значения, то
высокочастотную сопрягающую асимптоту
желаемой ЛАХ нужно переместить вправо.
Существуют методы, позволяющие более точно проверить избыток фазы на частотах аиб. [3]. Чтобы окончательно убедиться в приемлемости желаемой ЛАХ, можно по полученной желаемой передаточной функции построить любым методом кривую переходного процесса и проверить величины σ и tп.
При построении желаемой ЛАХ нужно следить, чтобы она как можно меньше отличалась от располагаемой ЛАХ, что нужно для упрощения корректирующих средств. Это замечание особенно относится к низкочастотной и высокочастотной частям ЛАХ. Желательно делать так, чтобы, по крайней мере, первая низкочастотная и последняя высокочастотная асимптоты обеих ЛАХ сливались вместе. Совпадение низкочастотных асимптот ЛАХ достигается за счет выбора требуемого коэффициента передачи в системе. Совпадение высокочастотных асимптот достигается соответствующим выбором желаемой ЛАХ в высокочастотной области. Заметим, что при формировании желаемой ЛАХ можно увеличивать, если это необходимо для совпадения асимптот, запасы по модулю LМи –LМ, так как такое увеличение только повысит качество системы.
В заключение из ординат желаемой ЛАХ вычитаются ординаты располагаемой ЛАХ. Результирующая ЛАХ разницы соответствует передаточной функции последовательного корректирующего звена. По виду этой ЛАХ в справочной литературе подбирается схема и параметры корректирующего звена последовательного типа. При необходимости это звено может быть пересчитано на эквивалентную обратную связь или эквивалентное параллельное корректирующее звено.