

Контрольные вопросы
1. Опишите линейные и нелинейные САР.
2. Дайте понятие линеаризации и объясните ее необходимость.
3. Изложите общий метод линеаризации.
4. Какова стандартная форма записи дифференциальных уравнений?
3. Динамические звенья и их характеристики
3.1. Общие положения
Для создания общей методики расчета различных систем автоматического регулирования удобно ввести понятие динамического звена. Под динамическим звеном понимают устройство любого физического вида и конструктивного содержания, описываемое определённым дифференциальным уравнением.
В
Рис. 3.1. Динамическое
звено
Обозначим входную величину звена через
х1,
выходную – через х2,
авозмущающее
воздействие – через
![]() (рис. 3.1).
(рис. 3.1).
Статическая характеристика любого звена может быть изображена в виде прямой линии (рис. 3.2), так как пока рассмотрим только линейные, или точнее линеаризованные системы.
В звеньях позиционного или статического типа линейной зависимостью х2 =kх1связаны выходная и входная величины в установившемся режиме (рис. 3.2,а). Коэффициент пропорциональности между выходной и входной величинами представляет собой коэффициент передачи.
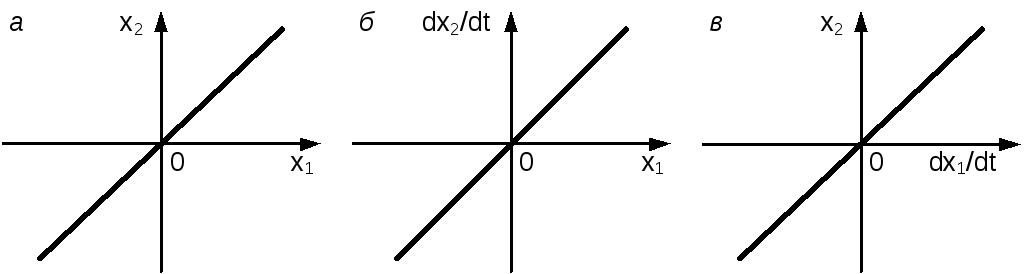
Рис. 3.2. Характеристики позиционных звеньев
В звеньях интегрирующего типа линейной
зависимостью
![]() связаны производная выходной величины
и входная величина в установившемся
режиме (рис. 3.2,б). В этом случае
для установившегося режима будет
справедливым равенство
связаны производная выходной величины
и входная величина в установившемся
режиме (рис. 3.2,б). В этом случае
для установившегося режима будет
справедливым равенство
![]() ,
откуда и произошло название этого типа
звеньев. Коэффициент пропорциональностиkназывается коэффициентом
передачи звена. В случае, если входная
и выходная величины звена имеют одинаковую
размерность, коэффициенту передачи
соответствует размерность – секунда
в минус первой степени (с-1).
,
откуда и произошло название этого типа
звеньев. Коэффициент пропорциональностиkназывается коэффициентом
передачи звена. В случае, если входная
и выходная величины звена имеют одинаковую
размерность, коэффициенту передачи
соответствует размерность – секунда
в минус первой степени (с-1).
В звеньях дифференцирующего типа, в
установившемся режиме, линейной
зависимостью
![]() связаны выходная величина и производная
входной (рис. 3.2,в), откуда и
произошло название этого типа звеньев.
Коэффициент пропорциональности
называется коэффициентом передачи
звена. Если входная и выходная величины
имеют одинаковую размерность, коэффициенту
передачи соответствует размерность –
секунда (с).
связаны выходная величина и производная
входной (рис. 3.2,в), откуда и
произошло название этого типа звеньев.
Коэффициент пропорциональности
называется коэффициентом передачи
звена. Если входная и выходная величины
имеют одинаковую размерность, коэффициенту
передачи соответствует размерность –
секунда (с).
Как уже отмечалось, классификация звеньев производится по виду дифференциального уравнения или, что все равно, по виду передаточной функции звена. Предположим, что звено, изображенное на рис. 3.1, описывается дифференциальным уравнением, представленным в стандартной форме записи
![]() .
(3.1)
.
(3.1)
При нулевых начальных условиях (то есть
при t< 0 входная и
выходная величины и их производные
тождественно равны нулю) и при отсутствии
внешнего возмущения (![]() )
может быть найденапередаточная
функция звенакак отношение
изображений по Лапласу – Карсону
выходной и входной величин
)
может быть найденапередаточная
функция звенакак отношение
изображений по Лапласу – Карсону
выходной и входной величин
 ,
(3.2)
,
(3.2)
где k1– коэффициент передачи звена;![]() – постоянная времени.
– постоянная времени.
При известной передаточной функции выходная величина может находиться из выражения
![]() . (3.3)
. (3.3)
Аналогичным образом может быть найдена передаточная функция звена по возмущению, если положить при нулевых начальных условиях входное воздействие равным нулю (х1= 0). Тогда искомая передаточная функция будет равна отношению изображений по Лапласу–Карсону выходной величины и внешнего возмущения
![]() . (3.4)
. (3.4)
В дальнейшем будем рассматривать только передаточную функцию звена, так как именно она даёт связь между входной и выходной величинами, что бывает необходимо знать при использовании звена в автоматической системе.