

1.3. Разомкнутые и замкнутые системы автоматического регулирования
Автоматическое регулирование может
осуществляться по принципу разомкнутого
и замкнутого циклов. В первом случае
(рис. 1.1) управляющее воздействие Y
поступает непосредственно или через
некоторый промежуточный элемент ПЭ на
исполнительный элемент ИЭ, воздействующий
в свою очередь на регулируемый объект
РО (или объект регулирования ОР в других
источниках) с целью обеспечения заданного
значения регулируемой величины X. Это
воздействие выражается в приложении к
регулируемому объекту регулирующего
воздействия
![]() .
.

Рис. 1.1. Регулирование по разомкнутому циклу
Для устранения влияния возмущающего воздействия F1в системе может быть предусмотрено введение дополнительного регулирующего воздействия, это показано на рис. 1.1 пунктиром. Тогда регулирующее воздействие будет определяться зависимостью
![]() .
(1.1)
.
(1.1)
Функции fиf1могут включать в себя операции дифференцирования и интегрирования по времени.
Крупным недостатком систем, работающих по разомкнутому циклу, является необходимость осуществления подобных функциональных связей для всех возмущающих воздействий, число которых может быть велико, что делает систему громоздкой.
Кроме того, для нормального функционирования этих систем необходимо тщательное масштабирование или градуировка всех элементов, осуществляющих функциональные связи. В системах разомкнутого цикла никак не измеряется и не контролируется истинное значение регулируемой величины. Вследствие этого при нарушении градуировки отдельных элементов из-за износа или воздействия внешних факторов, например температуры, регулируемая величина может сильно отличаться от ее заданного значения.
При регулировании по замкнутому циклу (рис. 1.2) производится измерение разности между требуемым и действительным значениями регулируемой величины, то есть разности между управляющим воздействием (входным сигналом) и регулируемой величиной
![]() .
(1.2)
.
(1.2)
Эту разность будем называть ошибкой системы регулирования или отклонением от заданного значения.
Для выполнения ошибки служит так называемый чувствительный элемент ЧЭ (или элемент сравнения ЭС в другой литературе) (рис. 1.2). Далее эта ошибка поступает через промежуточный элемент ПЭ к исполнительному элементу ИЭ, который прикладывает к объекту регулирующее воздействие, определяемое некоторой функциональной зависимостью
![]() , (1.3)
, (1.3)
которая также может включать в себя операции дифференцирования и интегрирования по времени.
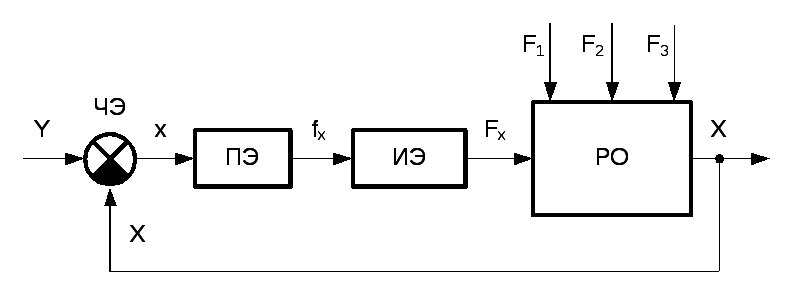
Рис. 1.2. Регулирование по замкнутому циклу
На схеме, изображённой на рис. 1.2, нетрудно проследить наличие замкнутого контура регулирования, образуемого цепью ЧЭ–ПЭ–ИЭ–РО–ЧЭ. Можно также заметить, что сигналы проходят в этом контуре только в одном направлении, отмеченном стрелками. Замыкание контура осуществляется цепью воздействия регулируемого объекта на чувствительный элемент. Эта цепь называется главной обратной связью системы. Таким образом, система регулирования по замкнутому циклу представляет собой систему с обратной связью. Система регулирования по разомкнутому циклу такой обратной связи не содержит.
Принцип регулирования, основанный на измерении ошибки или отклонения регулируемой величины, называется также принципом Ползунова – Уатта. В данном пособии будут рассматриваться в основном системы регулирования по замкнутому циклу.
Существенной особенностью системы регулирования по ошибке является её универсальность. Независимо от причины всякое появление ошибки, то есть отклонение регулируемой величины от заданного значения, вызывает появление регулирующего воздействия, определяемого выражением (1.3). Это значит, что система будет осуществлять автоматическое воздействие на объект как при изменении управляющего воздействия, так и при любом возмущающем воздействии.
Важным обстоятельством является также то, что при регулировании по замкнутому циклу жесткие требования по стабильности характеристик предъявляются только к чувствительному элементу. Промежуточный и исполнительный элементы могут иметь характеристики, изменяющиеся в сравнительно широких пределах. Это объясняется тем, что рассматриваемой системе важно точно выявить наличие ошибки. Если ошибка имеется, то исполнительный элемент будет прикладывать к объекту такое регулирующее воздействие, которое будет стремиться свести ошибку к нулю.
В простейших случаях назначение промежуточного элемента заключается в передаче выявленной ошибки от чувствительного элемента к исполнительному. Такие системы называются системами прямого регулирования.
Стремление повысить точность регулирования, а также малая выходная мощность чувствительного элемента заставляют применять в промежуточном элементе усилители. В этом случае достаточно большие значения регулирующего воздействия будут создаваться уже при малых ошибках. Такие системы называются системами не прямого регулирования.
Промежуточный элемент может содержать также корректирующие элементы,назначением которых является улучшение динамических свойств системы регулирования.
Недостатком системы автоматического регулирования по замкнутому циклу является принципиальная необходимость существования ошибки в установившемся или переходных режимах, так как причиной создания регулирующего воздействия является именно ошибка (1.3). Поэтому для повышения точности иногда применяют системы комбинированного регулирования,в которых сочетается регулирование по замкнутому и разомкнутому циклам. Регулирование по разомкнутому циклу осуществляется для управляющего воздействия или главного возмущающего воздействия. Таким образом, в системах комбинированного регулирования осуществляется одновременное регулирование по отклонению и управляющему воздействию или по отклонению и возмущающему воздействию.