

Изобразить обобщённую регулировочную характеристику управляемого преобразователя. Определить критерий выбора угла отпирания в инверторном режиме .

Общим при работе ТП в инверторном режиме на пассивную (обмотка возбуждения) и активную (якорь двигателя) цепи нагрузки является невозможность реализации инверторного режима преобразователя с углом регулирования =180. Для безопасного инвертирования максимальный угол управления ограничивается величиной
max=(++),
где угол коммутации,
=arccos![]() ;
;
угол восстановления запирающих свойств тиристоров, =3;
наибольшее значение асимметрии управляющих импульсов во всём диапазоне изменения угла регулирования, не более 3.
Для реальных ТП при максимально допустимых токах Idmax (2.25Idн в течение 10 с) угол коммутации составляет 812.
Тогда максимальный угол управления
max=165-160,
а угол безопасного инвертирования
min=180max=1520.
В инверторном режиме коммутация тиристоров должна заканчиваться таким образом, чтобы закрывающийся тиристор успел восстановить свои запирающие свойства, пока на нём имеется отрицательное напряжение, т.е. в пределах угла (рис.2). Если этого не произойдёт, то тиристор с момента wоt1 будет продолжать проводить ток, так как к нему прикладывается прямое напряжение еса, а затем евс. Это приведёт к “опрокидыванию” инвертора, при котором возникает аварийный ток, так как ЭДС двигателя и трансформатора совпадут по направлению (режим короткого замыкания). Для исключения “опрокидывания” инвертора необходимо, чтобы
=+.
В инверторном режиме внешние характеристики отличаются от характеристик выпрямительного режима тем, что с ростом нагрузки напряжение не падает, а уменьшается в соответствии с выражением (*) и рис.3
Кроме того, в
инверторном режиме существует граница
предельного (безопасного) режима
инвертирования, описываемая приближённо
уравнением: Ud=Edocos(+)+aв![]() .
.

Рис. 2 Временные диаграммы работы преобразователя
в инверторном режиме
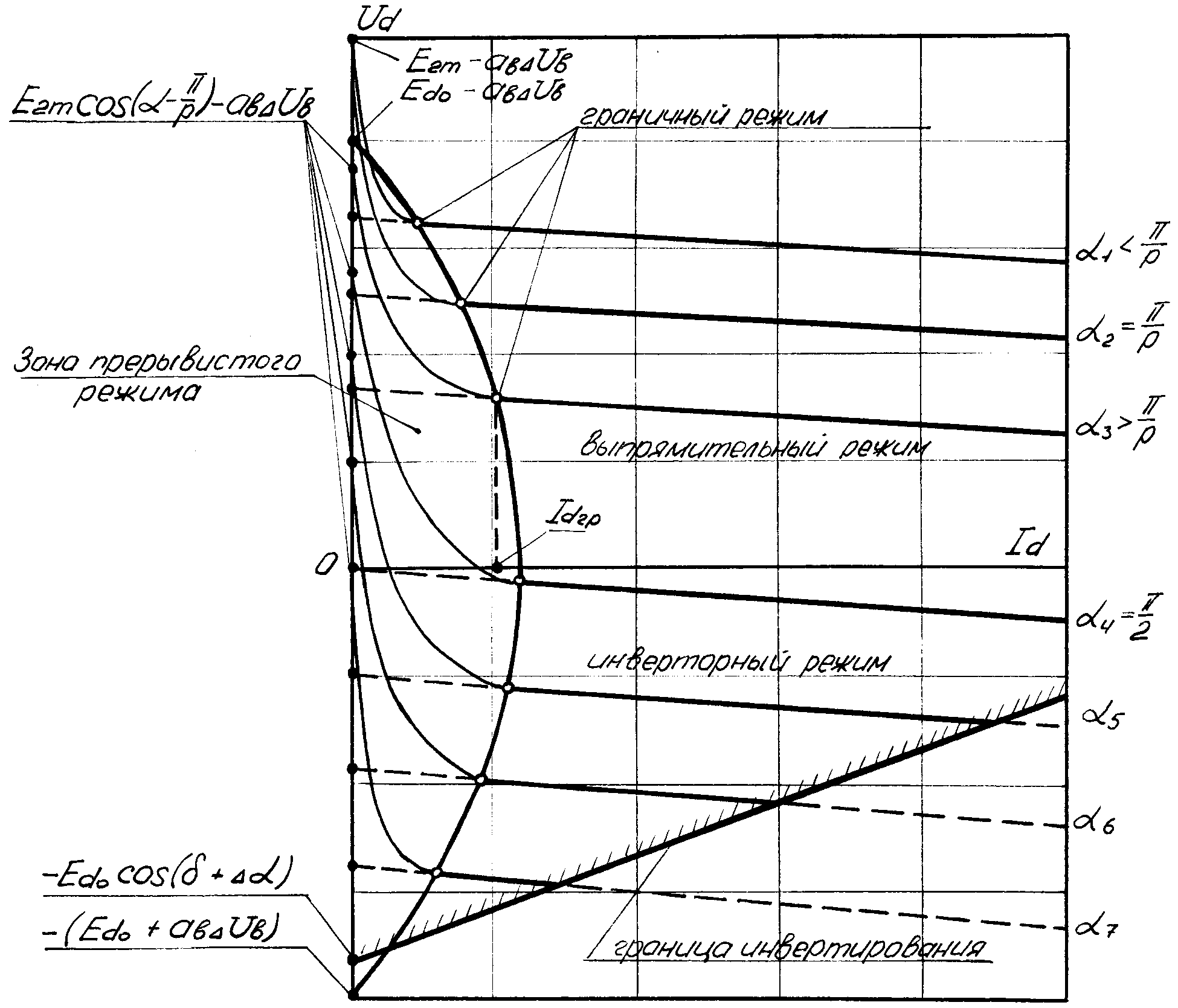
Рис. 3 Внешние характеристики
тиристорного преобразователя
Ud=EdocosaвUвав![]() Id,
(*)
Id,
(*)
где ав коэффициент, зависящий от схемы выпрямления, для нулевых схем ав=1, для мостовых ав=2;
Rф активное сопротивление питающей фазы;
хф индуктивное сопротивление питающей фазы.
В трансформаторном варианте сопротивления Rф и хф равны соответственно сопротивлениям трансформатора Rт и хт, приведённым ко вторичной обмотке трансформатора.

Система ТРН-АД. Показатели регулирования.
Логарифмический критерий устойчивости Найквиста.
Система трн–ад. Показатели регулирования
Р егулирование
скорости ведётся за счёт измененияU1.
егулирование
скорости ведётся за счёт измененияU1.
В разомкнутой СР, изменяя α можно регулировать U1.


При
![]() МАД
мал, что не способен преодолевать силы
трения самого двигателя, т.о.
МАД
мал, что не способен преодолевать силы
трения самого двигателя, т.о.
![]() .
.
В разомкнутой системе не обеспечивается регулирование скорости. Разомкнутая система позволяет осуществлять плавный пуск, за счёт плавного изменения момента.
Для осуществления регулирования скорости применяется замкнутая система регулирования с обратной связью по скорости. Поскольку U1 не синусоидальная, то основной момент обеспечивает 1-ая гармоника напряжения, влияние остальными можно пренебречь. Т.к. АД имеет активно-индуктивную нагрузку, то выходное напряжение также зависит от угла нагрузки, величина, которого для упрощенной схемы имеет вид:
![]() ,
Rэкв
– сопротивление статорной цепи, включая
ТРН.
,
Rэкв
– сопротивление статорной цепи, включая
ТРН.
Зависимость первой
гармоники напряжения от входного сигнала
управления будет не ли нейна
и зависит от угла нагрузки
нейна
и зависит от угла нагрузки![]() .
.
Видно, что 1-ая гармоника
U1
изменяется в достаточно больших пределах
лишь при малых скольжениях
![]() .
При регулировании скорости рабочее
скольжение:
.
При регулировании скорости рабочее
скольжение:![]() и в этой области скольжения изменение
угла нагрузки невелико и лежит в пределах
40°-60°,
таким образом
характеристику можно линериазовать и
считать, что
и в этой области скольжения изменение
угла нагрузки невелико и лежит в пределах
40°-60°,
таким образом
характеристику можно линериазовать и
считать, что
![]() .
.
![]()
![]()
В зоне малых отклонений от точки равновесия(работа потока двигателя будет мало изменяться от установившегося значения) можно найти выражение для момента:
![]()
![]()
![]()
![]()
![]() –скорость идеального
холостого хода в замкнутой системе
регулирования.
–скорость идеального
холостого хода в замкнутой системе
регулирования.
![]() –жёсткость механической
характеристики в замкнутой системе
регулирования.
–жёсткость механической
характеристики в замкнутой системе
регулирования.
Д=12
Плавность высокая
Мдоп при регулировании скорости должен быть таким на регулировочной характеристике, чтобы потери в АД не превышали его потерь на номинальной характеристике(естественной).
![]()
При работе на нижней
скорости диапазона регулирования
потери:
![]()
![]()
По мере увеличения диапазона регулирования нагрузки должны снижаться.
КПД такой же как и при реостатном регулировании:
 –
низкий.
–
низкий.Низкий
 ,
который пропорционален
,
который пропорционален ;
чем меньше
;
чем меньше ,
тем хуже.
,
тем хуже.
Примеры: приводы с
вентиляторной нагрузкой (![]() ),
или в приводах, где работа на пониженной
скорости составляет незначительную
часть времени цикла.
),
или в приводах, где работа на пониженной
скорости составляет незначительную
часть времени цикла.
Для увеличения момента на работе на низких скоростях в роторную цепь АД вводят добавочное сопротивление, часть потерь будет выделяться на нём, вне объёма двигателя, что увеличит допустимый момент.

Автоматизация подъёмно-транспорных механизмов циклического действия. Точный останов.
Типовые желаемые ЛАЧХ.