

Правила преобразования структурных схем
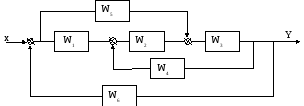
— перекрёстный контур, трудно написать передаточную функцию, существуют правила преобразования структурных схем:
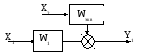
1. Перенос сумматора:
а)

передаточная функция:
![]()

X2
WЭКВ


![]()
![]()
б
 )
)
![]()
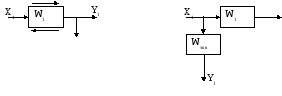
2. Перенос точки ответвления:
а) против направления передачи оси:
![]()
б) параллельно по направлению:
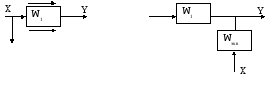
![]()

Система ШИП-Д. Показатели регулирования.
В тиристорном преобразователе, работающем на машину постоянного тока в некоторый момент времени выполняются условия:
 ,
гдеEd
–ЭДС двигателя;
L-индуктивность
обмотки якоря двигателя и сглаживающего
дросселя. Существуют ли условия
протекания тока через нагрузку?
,
гдеEd
–ЭДС двигателя;
L-индуктивность
обмотки якоря двигателя и сглаживающего
дросселя. Существуют ли условия
протекания тока через нагрузку?
Система шип-д. Показатели регулирования.

Диапазон регулирования: D=1…10
Регулирование плавное
![]()
Регулирование скорости двигателя целесообразно вести с постоянством момента.
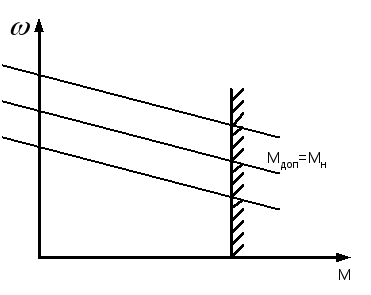
![]()
КПД – высокий, определяется падением напряжения на тиристорных ключах.
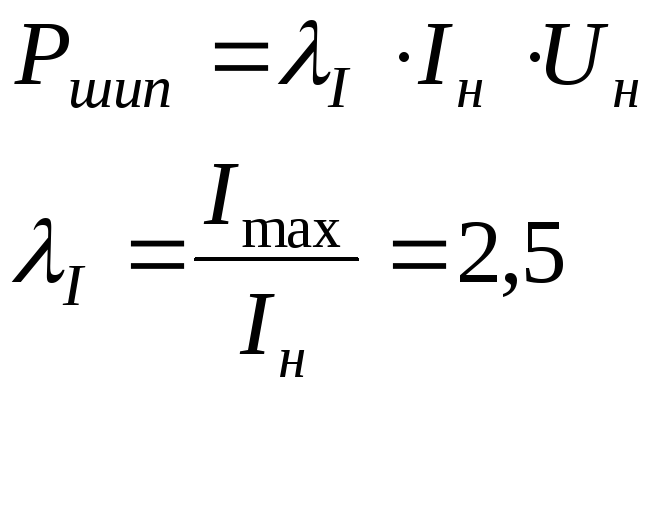
Тиристоры ШИП определяются на полную мощность двигателя.
 –для ДПТ.
–для ДПТ.
В ТП, работающем на
МПТ, в некоторый момент времени выполняется
условие:
![]() ,
ЕД
– ЭДС двигателя, L
– индуктивность обмотки якоря двигателя
и сглаживающего дросселя. Существуют
ли условия протекания тока через
нагрузку?
,
ЕД
– ЭДС двигателя, L
– индуктивность обмотки якоря двигателя
и сглаживающего дросселя. Существуют
ли условия протекания тока через
нагрузку?
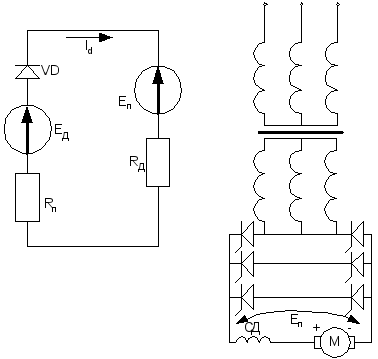
СД – сглаживающий дроссель, для снижения пульсаций в нагрузке.
Если пренебречь
сопротивлением ОЯ и СД, а так же
сопротивлением обмоток трансформатора,
то
![]() и уравнение электрического равновесия
ТП–Д будет выглядеть:
и уравнение электрического равновесия
ТП–Д будет выглядеть:![]() – справедливо для участка проводимости
вентилей.
– справедливо для участка проводимости
вентилей.
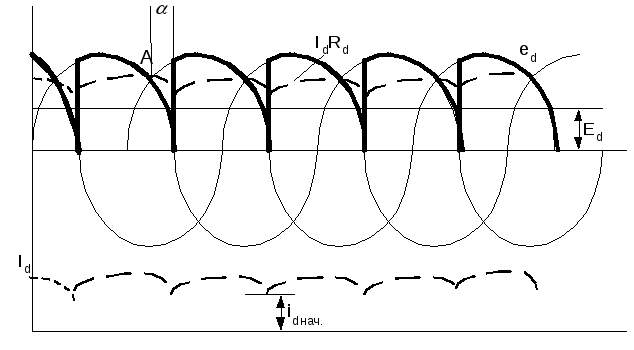
Режим непрерывного
тока(при больших МД).
В этой зоне при включении очередных
вентилей(вентиля) через нагрузку
протекает
![]() .
При этом
.
При этом![]() и ток растёт до точки А, при этом
и ток растёт до точки А, при этом![]() ,
т.к.
,
т.к.![]() .
ЭДС самоиндукции действует встречно сed
и система запасает электромагнитную
энергию в индуктивных элементах
системы(СД и ОЯ). В т.А
.
ЭДС самоиндукции действует встречно сed
и система запасает электромагнитную
энергию в индуктивных элементах
системы(СД и ОЯ). В т.А
![]() следовательно
следовательно![]() ,
ток перестаёт расти. За т. А
,
ток перестаёт расти. За т. А![]() ,
,![]() – ЭДС самоиндукции складывается с ЭДС
преобразователя и поддерживает ток в
нагрузке до момента открытия следующих
вентилей за счёт запасённой эл/маг.
энергии. Т.о. ток в системе является
непрерывным.
– ЭДС самоиндукции складывается с ЭДС
преобразователя и поддерживает ток в
нагрузке до момента открытия следующих
вентилей за счёт запасённой эл/маг.
энергии. Т.о. ток в системе является
непрерывным.

Электромеханические колебания резонансного типа в редукторных электроприводах.
Построение переходной функции и ЛАЧХ фазовой системы.
Эл. Механические колебания резонансного типа в редукторных электроприводах.
Свойственная зубчатым передачам неравномерность хода порождает периодические возмущения с частотой f перехода с зуба на зуб. Если J1>>J2 – эти возмущения не сказываются на работе двигателя. Если J1<<J2 – существенно влияют на работу.
Условия возникновения колебаний:
Механизмы поворота: с большим J2, определяющее влияние оказывает возмущение в зацеплении “зубчатый венец – ведущая шестерня”
![]() Zзв
– число зубьев.
Zзв
– число зубьев.
При пуске ωдв
изменяется от 0 до ωmax,
при торможении – наоборот. Эти механизмы
представляются в виде двухмассовой
системы, склонной к колебаниям Ω0;
даже малые возмущения, но с частотой
![]() могут вызвать резонанс. Обычно
установившиеся значения возмущения с
частотойfz
>f0,
но в переходных
режимах есть такие зоны, где fz
=f0.
могут вызвать резонанс. Обычно
установившиеся значения возмущения с
частотойfz
>f0,
но в переходных
режимах есть такие зоны, где fz
=f0.
Известно, что электропривод обладает демпфирующими способностями, т.е. средствами ЭП можно уменьшить колебания.
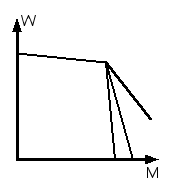
Линейная связь между ω и М подобна вязкому трению – можно воздействовать, регулируя наклон характеристики: большее демпфирование проявляется при более пологом участке характеристики.
Индуктивность цепи якоря – Lя уменьшает демпфирование: т.к. уменьшается действующее значение I (из-за увеличившегося XL), сдвигается по фазе I(M) относительно колебаний скорости ω.
О трицательная
рольL
тем выше, чем больше Ω0.
трицательная
рольL
тем выше, чем больше Ω0.
В однодвигательных ЭП за счёт резонанса увеличение динамических нагрузок при пуске достигает 40% Мпуск. При многодвигательном ЭП – ещё хуже; его развитие связано с увеличением производительности механизмов, а значит и их веса. Использование нескольких двигателей позволит уменьшить нагрузку на зубчатый венец – распределение нагрузки.
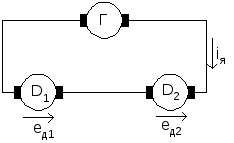
Существует два типа соединений двигателей: последовательное и параллельное.
Последовательное: статические нагрузки одинаковы, но в динамике:
![]() т.о.
т.о.
![]() ,
при колебанияхω1
и ω2
колеблются в противофазе, демпфирующее
действие ЭП не проявляется. Динамические
перегрузки больше среднего значения в
2 и более раз.
,
при колебанияхω1
и ω2
колеблются в противофазе, демпфирующее
действие ЭП не проявляется. Динамические
перегрузки больше среднего значения в
2 и более раз.
Параллельное соединение:
Даже при колебаниях
ω1
и ω2
в противофазе,
есть контур замыкания для каждого тока
–д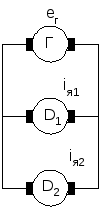 емпфирующее
действие проявляется.
емпфирующее
действие проявляется.
В статике нагрузки различны, т.к. в рассматриваемых ЭП динамические нагрузки много больше статических, т.о. более эффективно параллельное соединение.