

Электрический каскад:
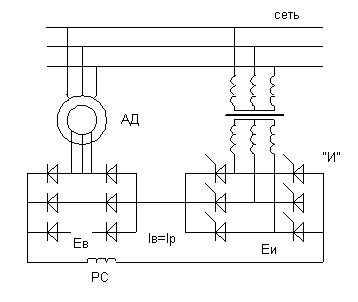
Едоб.
создаётся инвертором с помощью изменения
угла инвертирования(![]() ).
).
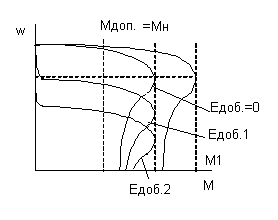
При Едоб. характеристика имеет большее Sк из-за повышенного сопротивления роторной цепи за счёт выпрямителя, инвертора, и РС. Уменьшение Мк связано с наличием выпрямительного моста, при наличии которого ток не может одновременно протекать по трём фазам(только по двум фазам). Введение Едоб. эффективно введению реактивного сопротивления в роторную цепь. Мощность, передаваемая из роторной цепи АД обратно в питающую цепь, пропорциональна мощности скольжения:
![]()
![]() –минимальная скорость
в заданном диапазоне регулирования.
–минимальная скорость
в заданном диапазоне регулирования.
![]()
Мощность скольжения Рs определяет величину мощности инвертора при заданном диапазоне регулирования скорости.
Величину момента,
развиваемого АД, статорная цепь которого
питается от сети постоянного напряжения,
выражается:
![]() ;
;![]() ;
;
![]() ,
т.о. каскад — регулирование скорости с
постоянным моментом.
,
т.о. каскад — регулирование скорости с
постоянным моментом.
Показатели:
Д=8(разомкнутая система)
Плавность высокая
КПД высокий, из-за возвращения энергии скольжения обратно в сеть
Коэффициент мощности высокий
Применяется на компрессорных станциях, водоснабжении.
Изобразить одну из схем узла принудительной коммутации тиристора в цепи постоянного тока. Кратко пояснить принцип её работы.
Для запирания тиристоров необходимо:
1)
![]()
2) Приложить
![]()
Совместно с тиристорами используют узлы принудительной коммутации (УПК) для отключения тиристоров.
УПК два вида:
Параллельные УПК(включаются параллельно силовому тиристору, параллельно нагрузке);
последовательные УПК
Параллельная УПК:

Коммутируем
![]() ,
УПК включает
,
УПК включает![]() и
и![]() ,
вспомогательный тиристор
,
вспомогательный тиристор![]() ,
диод
,
диод![]() .
Конденсатор
.
Конденсатор![]() заряжается предварительно от дополнительных
узлов( на схеме не показаны). Для отключения
заряжается предварительно от дополнительных
узлов( на схеме не показаны). Для отключения![]() подаётся
импульс, включающий
подаётся
импульс, включающий![]() ,
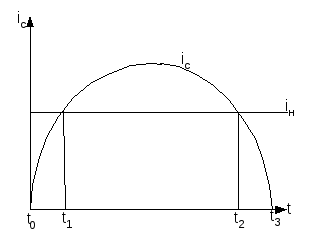
и в колебательном контуре
,
и в колебательном контуре![]() начинается
перезарядка
начинается
перезарядка![]() ,
т.о.
,
т.о.![]() изменяется
по синусоидальному закону. На интервале
изменяется
по синусоидальному закону. На интервале![]() этот
ток течёт навстречу току тиристора
этот
ток течёт навстречу току тиристора![]() ,
уменьшая его до 0 в точке
,
уменьшая его до 0 в точке![]() .
На интервале
.
На интервале![]() ток
ток![]() начинает
протекать через
начинает
протекать через![]() ,
на котором создаётся
,
на котором создаётся![]() ,
для силового тиристора
,
для силового тиристора![]() ,
,![]() ,
которое равно падению напряжению на
,
которое равно падению напряжению на![]() .
.![]() –обратный
диод, для замыкания тока в комплексной
нагрузке, если есть в
–обратный
диод, для замыкания тока в комплексной
нагрузке, если есть в![]() катушка.
Колебательный контур нужен для создания
переменного тока для запирания
катушка.
Колебательный контур нужен для создания
переменного тока для запирания![]() .
.

Взаимосвязанное частотное регулирование скорости АД.
Комбинированная последовательная коррекция.
Взаимосвязанное частотное регулирование скорости ад.
Простейший способ
регулирования, когда напряжение и
частота на статоре связаны друг с другом
определённым соотношением:
![]()
К ритический
момент уменьшается из-за падения
напряжения в статоре на низких скоростях,
так как потокосцепления уменьшается.
ритический
момент уменьшается из-за падения
напряжения в статоре на низких скоростях,
так как потокосцепления уменьшается.
Система регулирования скорости с внутренним контуром регулирования момента (системы скалярного и полярного управления).

При оптимизации, при
выборе
![]()



![]()
Для расширения диапазона регулирования и точности следует производить настройку контура на симметричный оптиум. При этом регулятор скорости будет пропорционально–интегральный(ПИ), или вводится второй контур регулирования скорости с пропорциональным регулятором(П).
В зависимости от регулятора скорости характеристики могут быть статические, если регулятор скорости пропорциональный; и характеристики могут быть астатическими если регулятор скорости пропорционально-интегральный.