

Manzhosov2
.pdfугловая скорость вала 120 об/мин. Определить, сколько оборотов сделает вал до остановки
(рис. 1.16).
Решение. Так как вал с маховиком представляет собой твердое тело, то изменение кинетической энергии его происходит согласно уравнению
ТТ0 АiE .
Вмомент остановки T = 0 уравнение принимает вид:
Т0 АiE .
Кинетическая энергия вала с маховиком, вращающимся вокруг неподвижной оси, которую примем за ось х, определяется по формуле
Т0 12 J x 02 ,
где Jx – момент инерции этого вала с маховиком относительно оси вращения.
К валу приложены внешние силы: суммарный вес вала и маховика G , нормальная
реакция подшипников N и сила трения скольжения F , приложенная к валу в точке, где передается давление вала на подшипники, и направленная противоположно вращательной скорости v этой точки.
Угол поворота вала изменяется от 0 до φ, и сумма работ внешних сил
АiE M xE .
Так как силы Q и N пересекают ось вращения вала, то их моменты относительно этой оси равны нулю.
Момент относительно оси вала имеет лишь сила трения F , модуль которой F = fN.
Так как угол наклона силы N к вертикали практически очень мал, то N ≈ G и F ≈ fG. Поэтому сумма работ внешних сил:
АiE FR fGR .
Момент силы трения отрицателен, так как направление вращения вала (против движения часовой стрелки) принимается за положительное, а момент силы трения направлен противоположно (по движению часовой стрелки).
Получаем:
|
J |
2 |
fGR , откуда |
J |
2 |
|
x |
0 |
x |
0 |
. |
||
2 |
|
|
||||
|
|
2 fGR |
||||
Вычислим моменты инерции вала (сплошного цилиндра) и махового колеса по соответствующим формулам:
J |
xB |
mВR2 |
GR2 |
8000 0,12 |
4,1 кг м2 ; |
|||||||
|
|
2 |
|
2g |
|
|
2 9,81 |
|
||||
|
|
|
|
|
|
|
||||||
J |
|
m |
|
i2 |
|
G |
|
t |
2 |
|
25 000 0,62 |
|
xМ |
М |
|
M |
|
x |
|
918,4 кг м2 . |
|||||
|
|
x |
|
|
g |
|
|
|
9,81 |
|
||
|
|
|
|
|
|
|
|
|
|
|
||
Момент инерции рассматриваемого тела равен сумме моментов инерции вала и маховика:
51

J |
x |
J |
xB |
J |
4,1 918,4 922,5 кг м2 . |
||||||
|
|
|
|
xМ |
|
|
|
|
|
||
Начальная угловая скорость тела: |
|
|
|
|
|
||||||
|
|
|
0 |
|
n0 |
120 |
4 c-1. |
|
|
||
|
|
|
|
|
|
30 |
30 |
|
|
|
|
Получаем величину угла φ в радианах: |
|
|
|
|
|||||||
|
|
|
|
|
922,5 16 2 |
|
44,73 |
2 |
. |
||
|
|
2 |
0,05 |
33 000 0,1 |
|
||||||
|
|
|
|
|
|
|
|||||
Выразив φ в оборотах, найдем число оборотов вала до остановки:
44,73 2 22,36 70 оборотов. 2
Механический коэффициент полезного действия машины
1.Силы, совершающие положительную работу, называются движущими силами, например, давление пара на поршень в цилиндре паровой машины или газа в двигателе внутреннего сгорания.
2.Силы, совершающие отрицательную работу, называемые силами сопротивления. Силы сопротивления делятся на две группы:
полезные силы сопротивления – силы, для преодоления которых предназначена машина, например, сопротивление поднимаемого машиной груза и т. д.;
вредные силы сопротивления – побочные силы сопротивления, как, например, силы трения, сопротивление воздуха и т. п.
3.Силы тяжести отдельных частей машины, совершающих попеременно то положительную, то отрицательную работу.
При установившемся движении машины работа движущих сил равна абсолютной
величине работы сил сопротивления:
Адв.с Апол.сопр Авр.сопр .
Работа, затрачиваемая на приведение машины в движение, расходуется на преодоление полезных и вредных сопротивлений:
Азатр Апол.сопр Авр.сопр.
Механический коэффициент полезного действия машины η при установившемся ее движении равен отношению полезной работы машины к работе, затраченной на приведение машины в движение:
Апол.сопр 1. Азатр
Если известны полезная мощность машины Nмаш и мощность двигателя, приводящего ее в движение Nдв , то механический коэффициент полезного действия машины
Nмаш . Nдв
52

1.1.4.Теоремы об изменении количества движения материальной точки
иколичества движения механического системы
Импульс силы и его проекции на координатные оси
Импульс силы характеризует передачу материальной точке механического движения со стороны действующих на нее тел за данный промежуток времени.
Если постоянная по модулю и направлению сила P действует в течение промежутка времени τ = t2 – t1, то ее импульсом за этот промежуток времени является вектор
S P .
Единицей импульса в системе МКС является импульс силы в один ньютон за время в одну секунду, т. е. один ньютон секунда (кг · м/с).
Импульс переменной силы Р = Р(t) за промежуток времени t2 – t1 находится следующим образом:
t2
S Pdt.
t1
Модуль и направление импульса переменной силы можно определить по способу проекций:
|
|
t2 |
|
t2 |
t2 |
|
Sx |
Xdt; |
Sy Ydt; |
Sz Zdt. |
|
|
|
t1 |
|
t1 |
t1 |
Здесь X f1 (t) ; |
Y f2 (t) ; |
Z f3 (t) |
– проекции переменной силы P P(t) на оси |
||
координат.
Модуль и направление импульса S определяются по его проекциям:
S  Sx2 Sy2 Sz2 ,
Sx2 Sy2 Sz2 ,
cos(S,i) SSx ; cos(S, j) SSy ; cos(S,k) SSz .
Для постоянной по модулю и направлению силы Р, действующей в течение промежутка времени τ, формулы имеют вид
Sx = Xτ, Sy = Yτ, Sz = Zτ,
где X, Y, Z – проекции силы Р на оси координат.
Импульс равнодействующей
Если к точке М приложено несколько сил P1 , P2 , P3 ,..., Pn , то равнодействующая этих сил
(рис. 1.17):
P = P1 + P2 + … + Pn.
Умножим обе части этого равенства на dt и проинтегрируем в пределах от t1 до t2:
t2 |
t2 |
t2 |
t2 |
|
Pdt P1dt P2dt ... Pndt. |
||||
t1 |
t1 |
t1 |
t1 |
|
Так как каждый из членов этого равенства представляет собой |
||||
импульс соответствующей силы, то |
53 |
Рис.1.17 |
||
|
|
|
|
|
|
|
|
|
|

S = S1 + S2 + … + Sn,
т. е. импульс равнодействующей нескольких сил за некоторый промежуток времени равен геометрической сумме импульсов составляющих сил за этот же промежуток времени.
В проекциях на координатные оси это равенство принимает вид
Sx S1x S2 x ... Snx ,
Sy S1y S2 y ... Sny , .
Sz S1z S2 z ... Snz .
Последние равенства показывают, что проекция импульса равнодействующей на любую ось равна алгебраической сумме проекций импульсов составляющих сил на ту же ось.
Теорема об изменении количества движения материальной точки
Количеством движения материальной точки называется вектор, имеющий направле-
ние скорости и модуль, равный произведению массы т на скорость ее движения υ. Единицы количества движения совпадают с единицами импульса силы. Проекции
количества движения тх на оси x, у, z равны:
тυх, тυу, тυz,
где υх, υу, υz – проекции скорости на оси координат.
Положим, что P – равнодействующая сил, приложенных к материальной точке. Теорема (об изменении количества движения материальной точки в дифферен-
циальной форме): производная по времени от количества движения материальной точки геометрически равна равнодействующей сил, приложенных к этой точке.
mw m ddtv d(dtmv) P.
Теорема (об изменении количества движения материальной точки в конечной форме): изменение количества движения материальной точки за некоторый промежуток времени равно геометрической сумме импульсов сил, приложенных к точке за тот же промежуток времени.
Пример применения теоремы об изменении количества движения материальной точки
Пример. Материальная точка массой т =10 г движется по окружности с постоянной скоростью 40 см/с. Найти импульс сил, действующих на точку за время прохождения точкой половины окружности (рис. 1.18).
Решение. Определим импульс сил:
|
В рассмотренном случае: |
|
|
поэтому |
|
Рис. 1.18 |
Модуль импульса: |
|
S = 2mυ2 = 2 · 10 · 40 = 800 г·см/с. |
||
|
||
|
54 |

При изменении положения диаметра M1M2 изменится направление импульса S, но сохранится его модуль.
Рассматриваемое равномерное движение точки по окружности происходит под действием постоянной по модулю силы, направленной к центру окружности.
Теорема об изменении количества движения механической системы
Количеством движения механической системы называется вектор, равный геометрической сумме (главному вектору) количеств движения всех материальных точек этой системы.
Если отдельная точка системы Mt (i = 1, 2, …, n) имеет массу mi и скорость vi , то вектор количества движения системы K
Теорема (об изменении количества движения механической системы в дифференциальной форме): производная по времени от количества движения механической системы геометрически равна главному вектору внешних сил, действующих на эту систему:
Следствия из теоремы:
1. Если главный вектор внешних сил все время равен нулю, то количество движения механической системы остается постоянным:
RE = 0, K = mvc = const.
2. Если проекция главного вектора внешних сил на какую-либо ось все время равна нулю, то проекция количества движения механической системы на эту ось постоянна:
XE = 0, Kx = mυCx = const.
Следствия из теорем об изменении количества движения механической системы выражают закон сохранения количества движения системы.
Теорема (об изменении количества движения механической системы в конечной форме): изменение количества движения механической системы за некоторый промежуток времени равно геометрической сумме импульсов внешних сил, приложенных к системе, за тот же промежуток времени.
Пример применения теоремы об изменении количества движения механической системы
Пример. Определить количество движения диска массой m и радиусом R, вращающегося вокруг неподвижной оси, проходящей через его центр тяжести, с угловой скоростью ω (рис. 1.19).
Решение. Так как центр масс диска остается неподвижным, т. е. υc = 0, то количество движения диска:
|
|
mvc 0 . |
|
К |
Рис. 1.19 |
Показав векторы количеств движения точек диска, расположенных на одном из его диаметров, убедимся в том, что их геометрическая сумма равна нулю. Поэтому и геометрическая сумма количеств движения всех точек диска оказывается равной нулю, т. е.
55

K = Σmivi = 0.
Теорема (Эйлера):
Произвольное перемещение твердого тела, имеющего неподвижную точку, можно осуществить посредством вращения вокруг некоторой оси, проходящей через эту точку.
Понятие о теле переменной массы. Уравнение Мещерского. Формула Циолковского
Телом переменной массы называют тело, масса которого изменяется с течением времени.
Если размерами этого тела по сравнению с проходимыми им расстояниями можно пренебречь, то его можно рассматривать как точку переменной массы.
Точка переменной массы определяется математически как точка с массой, являющейся функцией времени m(t).
Уравнение m ddtv P R представляет собой основное уравнение динамики точки
переменной массы и называется уравнением Мещерского.
Из этого уравнения следует, что уравнение движения точки переменной массы имеет вид основного уравнения динамики точки постоянной массы, находящейся под действием приложенных к ней сил и реактивной силы.
|
|
|
0 |
|
max 0 |
|
|
mг |
|
ur ln 1 |
mk |
|
||
|
|
|
|
и называется формулой Циолковского. Она показывает, что зависит от ее начальной скорости υ0, от относительной скорости
от относительного запаса топлива:
mг0  mk .
mk .
Рис. 1.21
1.1.5. Теоремы об изменении момента количества движения материальной точки и об изменении кинетического момента механической системы
Моменты количества движения материальной точки относительно центра и относительно оси
Момент количества движения mv точки М относительно центра О представляет собой вектор L0 , направленный перпендикулярно плоскости, проходящей через вектор mv и центр
О в ту сторону, откуда вектор mv по отношению к центру О виден направленным против движения часовой стрелки (рис. 1.20).
Модуль вектора Lo равен произведению величины mυ на плечо h вектора mυ относительно центра О:
Lо= mυ×h.
Момент количества движения Lo можно |
Рис. 1.20 |
определить векторным произведением радиуса-вектора
r, проведенного из центра О в точку М, на вектор количества движения mυ:
56

Момент Lz количества движения mv точки М относительно оси z равен взятому со знаком плюс или минус произведению проекции вектора mυ на плоскость I, перпендикулярную к оси z, на плечо этой проекции относительно точки О пересечения оси z с плоскостью I (рис. 1.21):
Lz = ±mυ1×h1,
причем Lz > 0, если, смотря навстречу оси z, можно видеть проекцию mυ1 по отношению к точке О, направленной против движения часовой стрелки, и Lz < 0 – в обратном случае.
Теорема об изменении момента количества движения материальной точки Теорема (об изменении момента количества движения материальной точки
относительно центра): производная по времени от момента количества движения материальной точки относительно некоторого центра равна геомет-рической сумме моментов сил, действующих на точку, относительно того же центра.
ddtL0 M i0.
Теорема (об изменении момента количества движения точки относительно оси): производная по времени от момента количества движения материальной точки относительно некоторой оси равна алгебраической сумме моментов сил, действующих на точку, относительно этой же оси.
dLx |
|
M1x M 2x ... M nx , |
|
|
dt |
|
|||
|
|
|
||
dLy |
|
|
||
|
|
|
||
|
|
|
M1y M 2 y ... M ny , |
или |
dt |
|
|||
|
|
|
||
dLz |
|
|
M1z M 2 z ... M nz . |
|
dt |
|
|
||
|
|
|
||
dLx
dt dLy
dt dLz
dt
Mix ,
Miy , .
Miz ,
Здесь Lz, Ly, Lz – моменты количества движения точки М относительно осей координат, a Mix, Miy, Miz – моменты силы Pi относительно этих же осей.
Следствия из теоремы:
1.Если линия действия равнодействующей приложенных к материальной точке сил все время проходит через некоторый неподвижный центр, то момент количества движения материальной точки относительно этого центра остается постоянным.
2.Если момент равнодействующей приложенных к материальной точке сил относительно некоторой оси все время равен нулю, то момент количества движения материальной точки относительно этой оси остается постоянным.
Кинетический момент механической системы относительно центра и оси
Кинетическим моментом, или главным моментом количеств движения механической системы относительно данного центра, называют вектор, равный геометрической сумме моментов количеств движения всех материальных точек системы относительно этого центра.
Кинетический момент механической системы относительно центра О:
Кинетическим моментом, или главным моментом количеств движения механической системы относительно оси, называется алгебраическая сумма моментов количеств движения всех материальных точек системы относительно этой оси.
57

Проекция кинетического момента механической системы относительно некоторого центра О на ось, проходящую через этот центр, равна кинетическому моменту системы относительно этой оси.
Теорема об изменении кинетического момента механической системы Теорема (об изменении кинетического момента механической системы): производная
по времени от кинетического момента механической системы относительно некоторого центра геометрически равна главному моменту внешних сил, действующих на эту систему относительно того же центра.
Векторному равенству соответствуют три равенства в проекциях на оси координат:
dLx
dt dLy
dt dLz
dt
M ixE M xE ,
M iyE M yE , .
M izE M zE .
Последние уравнения показывают, что производная по времени от кинетического момента механической системы относительно некоторой оси равна главному моменту внешних сил относительно этой оси.
Следствия из теоремы:
1.Если главный момент внешних сил относительно некоторого центра все время равен нулю, то кинетический момент механической системы относительно этого центра остается постоянным.
2.Если главный момент внешних сил относительно некоторой оси все время равен нулю, то кинетический момент механической системы относительно этой оси остается постоянным.
Следствия из теорем об изменении кинетического момента механической системы выражают закон сохранения кинетического момента механической системы.
Кинематическая интерпретация теоремы об изменении кинетического момента механической системы относительно центра. Теорема Резаля
При движении механической системы ее кинетический момент относительно некоторого центра изменяется как по модулю, так и по направлению (рис. 1.22).
Пусть Lо – кинетический момент системы точек M1, M2, …, Mn относительно центра O.
При движении системы точка А – конец вектора Lо описывает в пространстве некоторую линию, называемую годографом кинетического момента механической системы.
Теорема Резаля (об изменении кинетического момента механической системы): скорость (u) конца вектора кинетического момента механической системы относительно некоторого
центра геометрически равна главному моменту внешних сил, действующих на эту систему, относительно того же центра (рис. 1.22).
58
1.1.6.Принцип Даламбера для материальной точки
идля механической системы
Принцип Даламбера для материальной точки |
|
Принципом Германа–Эйлера–Даламбера называют общий метод, |
|
при помощи которого уравнениям динамики по форме придается вид |
|
уравнений статики. Этот метод, предложенный в 1716 г. Германом и |
|
обобщенный в 1737 г. Эйлером, получивший название петербургского |
|
принципа, часто называют началом, или принципом Даламбера, хотя |
|
действительная сущность начала Даламбера не аналогична |
|
петербургскому принципу. Положим, что материальная точка М под |
Рис. 1.23 |
действием системы сил Р1, Р2, ..., Рn движется с ускорением w |
|
(рис. 1.23). |
|
Р1 + Р2 + …+ Рn + Ф = 0.
Полученное соотношение формулируется так: геометрическая сумма всех приложен-
ных к точке сил и силы инерции этой точки равна нулю.
Это означает, что для решения задачи динамики материальной точки по принципу Германа–Эйлера–Даламбера следует, помимо приложенных к точке М сил, условно приложить к этой точке и силу инерции Ф. Тогда многоугольник рассматриваемой системы сил Р1, Р2, ..., Рт, Ф будет замкнут, и суммы их проекций на координатные оси будут равны нулю. Как известно, в действительности сила инерции материальной точки приложена не к ней, а к телу, сообщающему точке ускорение. Приложение силы инерции к точке является лишь условным приемом, сводящим задачу динамики по форме решения к задаче статики.
Благодаря своей простоте этот метод получил широкое применение во многих прикладных дисциплинах. В ряде случаев он обеспечивает наиболее простое и удобное решение задач динамики.
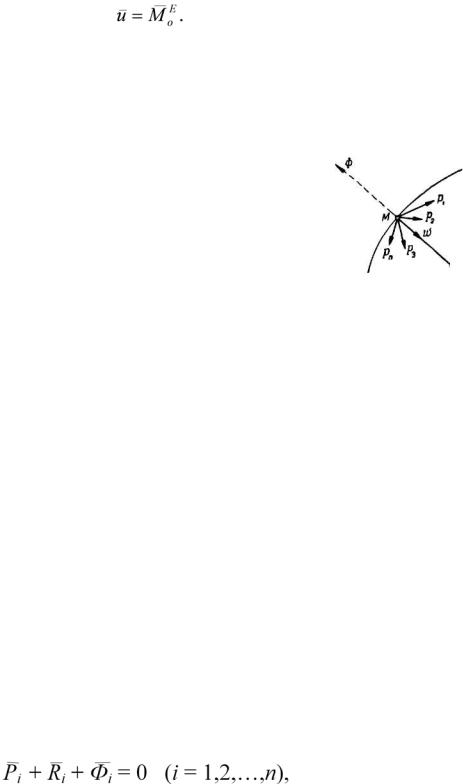
Принцип Даламбера для несвободной механической системы
При изучении движения несвободной механической системы так же, как и при изучении движения одной несвободной точки, применяют принцип освобождаемости от связей. По этому принципу имеющиеся связи отбрасывают, заменяя их действие соответствующими реакциями. Полученную механическую систему рассматривают как свободную, находящуюся под действием задаваемых сил и реакций связей.
Рассмотрим несвободную механическую систему, состоящую из п материальных точек. Применим к каждой точке Мi этой системы принцип Германа–Эйлера–Даламбера.
Тогда
где Рi – равнодействующая всех задаваемых сил, приложенных к точке Мi;
Ri – равнодействующая реакций связей, приложенных к этой точке; Фi = mi wi – сила инерции материальной точки Мi.
Это уравнение показывает, что в любой момент времени геометрическая сумма равнодействующей задаваемых сил, равнодействующей реакции связей и силы инерции для каждой материальной точки несвободной механической системы равна нулю. Это положение
59

называется принципом Германа–Эйлера–Даламбера для несвободной механической системы.
Сложив все п уравнений, получим:
Из этого уравнения следует, что в любой момент времена для всякой несвободной механической системы геометрическая сумма главных векторов задаваемых сил, реакций связей и сил инерции материальных точек системы равна нулю.
Уравнение показывает, что в любой момент времени для всякой несвободной механической системы геометрическая сумма главных моментов задаваемых сил, реакций связей и сил инерции материальных точек системы относительно любого неподвижного центра равна нулю.
а б
Рис. 1.24
Примеры применения принципа Даламбера
Пример 1. Подъемник весом G = 7350 Н поднимается равноускоренно и в первые 5 секунд проходит 25 м. Найти натяжение поднимающего его троса (рис. 1.24).
Решение. Приложим к подъемнику действующие на него силы: его вес G и реакцию троса Т. Условно приложим к подъемнику его силу инерции ma , направив ее противоположно ускорению a , т. е. вниз. Тогда геометрическая
сумма сил G, Т и Ф равна нулю: G T Φ 0 . Так как силы направлены по одной прямой, то
T G 0,
T G .
Для определения реакции троса найдем модуль силы инерции подъемника, определив предварительно его ускорение. Уравнение равноускоренного движения из состояния покоя:
H at2  2,
2,
a2H t2 2 25 / 52 2 м/с2 ,
t2 2 25 / 52 2 м/с2 ,
Φma G g a (7350 / 9,8) 2 1500 Н.
g a (7350 / 9,8) 2 1500 Н.
Находим реакцию троса, равную его натяжению:
T G Φ 7350 1500 8850 Н.
При движении подъемника вниз с тем же ускорением:
T G 0,
T G Φ 7350 1500 5850 Н.
При равномерном движении подъемника (как вверх, так и вниз) a = 0, Ф = 0, а потому:
T G 7350 Н.
Пример 2. Шарик А весом G = 50 сН подвешен на нити длиной l = 40 см, закрепленной в неподвижной точке O. Шарику сообщается равномерное движение по окружности в горизонтальной плоскости, при котором нить составляет с вертикалью угол α = 30˚. Определить натяжение нити и скорость шарика этого канонического маятника.
60