

3.4. Мгновенная угловая скорость и угловое ускорение Кинематические уравнения Эйлера
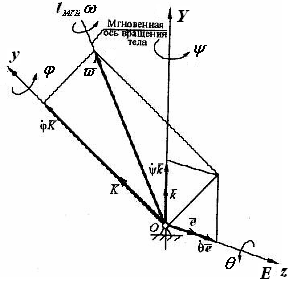
Твердое тело с одной неподвижной точкой в общем случае участвует одновременно в трех вращениях, векторы угловых скоростей которых с использованием углов Эйлера имеют вид:
![]()
вектор угловой скоростипрецессии;
вектор угловой скоростипрецессии;
![]()
вектор угловой скоростинутации;
вектор угловой скоростинутации;
![]()
вектор угловой скоростиротации
(собственного вращения).
вектор угловой скоростиротации
(собственного вращения).
Здесь
![]() единичные орты осей вращенияOY
, OE, O
y соответственно
(рис.3.9). Поскольку названные оси
пересекаются в точкеО, то абсолютное
движение тела в каждый момент
Рис.3.9 времени есть вращение вокруг
мгновенной оси, проходящей через точку
пересечения выше названных осей, с
мгновенной угловой скоростью
единичные орты осей вращенияOY
, OE, O
y соответственно
(рис.3.9). Поскольку названные оси
пересекаются в точкеО, то абсолютное
движение тела в каждый момент
Рис.3.9 времени есть вращение вокруг
мгновенной оси, проходящей через точку
пересечения выше названных осей, с
мгновенной угловой скоростью![]() ,
равной геометрической сумме векторов
угловых скоростей составляющих :
,
равной геометрической сумме векторов
угловых скоростей составляющих :
![]() (3.26)
(3.26)
О сь,
совпадающая с вектором
сь,
совпадающая с вектором![]() ,
являетсямгновенной осью вращения
,
являетсямгновенной осью вращения
![]() твердого тела вокруг неподвижной точкиО. Мгновенная ось вращения представляет
собой геометрическое место точек тела,
скорости которых в данный момент времени
равны нулю.
твердого тела вокруг неподвижной точкиО. Мгновенная ось вращения представляет
собой геометрическое место точек тела,
скорости которых в данный момент времени
равны нулю.
Мгновенная угловая скорость меняется
с течением времени как по величине, так
и по направлению. Это изменение
опреде- Рис.3.10 ляется
производной по времени от угловой
скорости и называется мгновенным угловым
ускорением![]() тела:
тела:
 (3.27)
(3.27)
или ![]()
где
![]()
 составляющая
составляющая![]() ,
направленная вдоль мгновенной оси
вращения и характеризующая изменение
,
направленная вдоль мгновенной оси
вращения и характеризующая изменение![]() по величине;
по величине;
![]()

составляющая
составляющая![]() ,
перпендикулярная вектору
,
перпендикулярная вектору![]() и характер
и характер изующая
изменение
изующая
изменение![]() по направлению (
по направлению (![]() ).
Вектор мгновенного углового ускорения
).
Вектор мгновенного углового ускорения![]() будем откладывать от неподвижной точкиОтела (рис.3.10).
будем откладывать от неподвижной точкиОтела (рис.3.10).
Определение алгебраической
величины проекций
![]() ,
,![]() ,
,![]() вектора
вектора![]() ,
(cм. выражение (3.26)) на оси
подвижной системы координатO
xyz (рис.3.11),
единичные орты ко Рис.3.11 торой
,
(cм. выражение (3.26)) на оси
подвижной системы координатO
xyz (рис.3.11),
единичные орты ко Рис.3.11 торой![]() ,
,![]() ,
,![]() соответственно,
т.е.
соответственно,
т.е.
![]() (3.28)
(3.28)
Согласно (3.26),
![]()
Разложение вектора
![]() по
базису[x]П
как следует
из формул (3.15) и (3.25) таково:
по
базису[x]П
как следует
из формул (3.15) и (3.25) таково:
![]() =
=![]() (3.29)
(3.29)
Вектор![]() ,
как следует из формул (3.20) и (3.21), можно
представить в виде
,
как следует из формул (3.20) и (3.21), можно
представить в виде
![]()
![]() (3.30)
(3.30)
Подставляя выражения (3.29) , (3.30) в соотношение (3.26), получаем
 Таким
образом, искомые проекции вектора
угловой скорости на оси подвижной
(связанной с телом) системы координат
будут равны
Таким
образом, искомые проекции вектора
угловой скорости на оси подвижной
(связанной с телом) системы координат
будут равны
 или
или (3.31)
(3.31)
Полученные соотношения носят название
кинематических уравнений Эйлера. Они устанавливают связь между проекциями
вектора угловой скорости тела![]() ,
углами Эйлера
,
углами Эйлера![]() и их первыми производными по времени.
и их первыми производными по времени.
3.5. Скорость и ускорение точек тела. Формула Ривальса
Выражение для скорости точки тела в случае его сферического движения имеет вид формулы Эйлера:
![]()
 (3.32)
(3.32)
Модуль скорости
точки тела
![]() гдеh
кратчайшее
расстояние от рассматриваемой точки
до мгновенной оси вращения (рис.3,12).
Таким образом, как и при вращении вокруг
неподвижной оси, при сферическом
движении вокруг неподвижной точкискорости точек Рис.3.12 тела
в данный момент времени пропорциональны
h.
гдеh
кратчайшее
расстояние от рассматриваемой точки
до мгновенной оси вращения (рис.3,12).
Таким образом, как и при вращении вокруг
неподвижной оси, при сферическом
движении вокруг неподвижной точкискорости точек Рис.3.12 тела
в данный момент времени пропорциональны
h.
Вектор скорости точки тела перпендикулярен
плоскости, в которой лежат векторы
![]() и
и![]() (заштрихованная
плоскость на рис.3.12), т.е. перпендикуляренh
и направлен по касательной к мгновенной
траектории точки в сторону угловой
скорости тела, вращающегося вокруг
мгновенной оси.
(заштрихованная
плоскость на рис.3.12), т.е. перпендикуляренh
и направлен по касательной к мгновенной
траектории точки в сторону угловой
скорости тела, вращающегося вокруг
мгновенной оси.
Если в данный момент времени скорость
точки тела равна![]() ,
то ее ускорение определяется формулой
,
то ее ускорение определяется формулой
![]()
С учетом (3.32) можно записать,
![]()
Поскольку
![]() то
то
![]() (3.33)
(3.33)
 Полученное
соотношение называютформулой
Ривальса. Ускорение
Полученное
соотношение называютформулой
Ривальса. Ускорение![]() есть геометрическая сумма двух
составляющих.
есть геометрическая сумма двух
составляющих.![]() вращательное
ускорение;
вращательное
ускорение;![]() осе
осе
стремительное ускорение.
Таким образом,
![]()
![]() (3.34)
(3.34)
Вектор вращательного ускорения
![]() направлен
перпендикулярно к плоскости, в которой
лежат векторы
направлен
перпендикулярно к плоскости, в которой
лежат векторы![]() и
и
![]() (заштрихованная плоскость на рис.3.13),
так, что
с конца его по Рис.3.13
ворот
от первого ко второму кажется против
хода часовой стрелки. Модуль вектора
(заштрихованная плоскость на рис.3.13),
так, что
с конца его по Рис.3.13
ворот
от первого ко второму кажется против
хода часовой стрелки. Модуль вектора ![]() равен
равен
![]() ,
(3.35)
,
(3.35)
где h1кратчайшее расстояние от точки до линии
действия вектора углового ускорения![]() в данный момент времени (см. рис.3.13).
в данный момент времени (см. рис.3.13).
Вектор осестремительного ускорения
![]() (рис.3.13) перпендикулярен к плоскости, в
которой лежат векторы
(рис.3.13) перпендикулярен к плоскости, в
которой лежат векторы
![]() и
и
![]() ,
и направлен от точкиМ по перпендикуляру,
проведенному из нее на мгновенную ось
вращения тела. Модуль вектора
,
и направлен от точкиМ по перпендикуляру,
проведенному из нее на мгновенную ось
вращения тела. Модуль вектора![]() ,
учитывая (3.32) и то, что
,
учитывая (3.32) и то, что![]()
![]()
![]() ,
равен
,
равен
![]() (3.36)
(3.36)
Ускорение точки тела, вращающегося вокруг неподвижной точки, равно геометрической сумме векторов вращательного и осестремительного ускорений.
Модуль ускорения
![]() равен
равен
![]()
![]()
![]() (3.37)
(3.37)
Следует отметить,
что формула Ривальса(3.33) аналогична
формуле ускорения точки тела, вращающегося
вокруг неподвижной оси. Но там векторы![]()
![]()
![]() в отличие от формулыРивальса.
в отличие от формулыРивальса.
В о п р о с ы для с а м о к о н т р о л я
1. Дайте определение вращательному движению твердого тела вокруг неподвижной точки.
2. . Какими параметрами определяется положение твердого тела, одна из точек которого неподвижна?
3. Какие параметры (так называемые корабельные углы), предложены Крыловым А.Н для определения положения корабельных носителей на волнении?
4. Что принято за начало неподвижной системы координат,
относительно которой определяется положение (движение) корабельного носителя и связанной с ним подвижной системы координат (рис.3.1) и (рис.3.1,б)?
5. Формулы преобразования координат от связанной с кораблем системы координат к неподвижной системе координат.
6. Поворотные матрицы. Как определяется их структура?
7. В каких случаях рекомендуется использование углов Эйлера?
8. Какие параметры приняты за углы Эйлера. Какие оси называются осями прецессии, нутации, ротации (собственного вращения)?
9, Почему ось нутации называется линией узлов или замечательной осью?
10. Что называют мгновенной осью вращения твердого тела с одной неподвижной точкой и каковы уравнения мгновенной оси в неподвижной и подвижной системах осей декартовых координат?
11. Каково уравнение мгновенной угловой скорости , выраженное как геометрическая сумма трех составляющих угловых скоростей прецессии, нутации, ротации (и линии их действия)?
12. Как определяется модуль и направление углового ускорения тела при сферическом движении?
13. Почему направления векторов углового ускорения и угловой скорости тела при сферическом движении не совпадают?
14. Как определяются скорости точек тела при сферическом движении?
15. Какие модули и направления имеют составляющие ускорения точки тела при сферическом движении?
16. Почему направления векторов скорости точки и ее вращательного ускорения при сферическом движении тела не совпадают?
17. Какой частный случай вращения твердого тела , имеющего одну неподвижную точку, называется регулярной прецессией?
Г л а в а 4