

1.9.3. Способы распознавания классов воздушных объектов по сигнальным признакам
Распознавание по радиолокационным портретам. Наиболее высокие характеристики радиолокационного распознавания основных классов аэродинамических целей: самолетов СА и ТА, ракет, ложных целей обеспечиваются при использовании сигнальных признаков получаемых при зондировании пространства сверхширокополосными сигналами с шириной спектра 50… 70 МГц. Получаемое одномерное радиолокационное изображение ВО позволяет обеспечить вероятность правильного распознавания Р > 0,9 за 1… 3 обращения к ВО при отношении сигнал/шум 18… 23 дБ.
Практически все ВО для сверхширокополосного сигнала являются распределенными целями. Переотраженный сигнал от различных «блестящих» точек на поверхности ВО состоит из ряда дискретных сигналов не перекрывающихся во времени. Расположение таких сигналов на временной оси и их количество устойчиво и соответствует геометрической форме облучаемого объекта и его ракурсу относительно РЛС (Рис. 1.36).
Имея априорную информацию о радиолокационных портретах ВО, можно осуществить их распознавания путем сравнения полученного портрета ВО с эталонными портретами известных радиолокационных целей. Для этого рассчитываются коэффициенты корреляции полученного портрета с эталонными. По максимальному коэффициенту корреляции определяется класс ВО.
Ограничения способа. Вид радиолокационного портрета существенно зависит от ракурса распознаваемого ВО, т.к. при его изменении изменяются наблюдаемые геометрические размеры объекта, в частности, вдоль оси дальности. Поэтому необходимо иметь набор эталонных портретов для различных ракурсов цели. Это приводит к увеличению объема аппаратуры распознавания и повышению требований к производительности вычислительных средств. Кроме того, эталонные портреты должны соответствовать тем ВО, по которым производится распознавание.

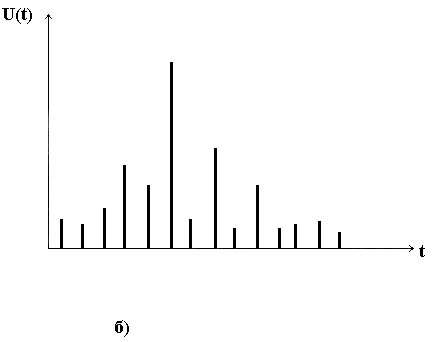
Рис. 1.36. Радиолокационный портрет истребителя F – 102 (а),
дискретные отсчеты радиолокационного портрета (б)
Другой существенный недостаток – энергия отраженного сигнала от распределенных «блестящих» точек распределяется по различным дискретам дальности. В результате отношение сигнал/шум в каждом элементе разрешения по дальности уменьшается и размеры зоны распознавания становятся меньше, чем зоны обнаружения. Поэтому сверхширокополосный сигнал не целесообразно использовать при решении задачи обнаружения, а в РЛС необходимо использовать один вид зондирующего сигнала для обнаружения, а другой – для распознавания.
Наличие внешних помех искажает радиолокационный портрет ВО и при его сопоставлении с эталонным коэффициентом корреляции уменьшается, увеличивается вероятность перепутывания классов ВО. Для ослабления влияния помех (отражения от гидрометеообразований, подстилающей поверхности и т.д.) аппаратура защиты от пассивных помех должна быть сверхширокополосной, а амплитудно–скоростная характеристика системы СДЦ не должна иметь провалов в заданном диапазоне скоростей ВО.
В силу ограниченности возможностей вычислительных средств размеры используемого радиолокационного портрета по дальности должны быть ограниченны. Поэтому обработка радиолокационных портретов осуществляется в стробах по дальности. Чтобы обеспечить положение строба на заданной дальности с требуемой точностью (единицы – десятки метров), необходимо не менее точно измерять дальность до ВО. Потенциальная точность измерения дальности при колоколообразной форме импульсов определяется из соотношения
![]()
где σД – среднеквадратическая ошибка измерения дальности; q – отношение амплитуды сигнала к среднеквадратическому значению шума на выходе устройства оптимальной обработки; Пи – ширина спектра зондирующего импульса; М – число импульсов в пачке.
В РЛС, использующей сверхширокополосный сигнал для решения задачи распознавания классов ВО, должен быть предусмотрен режим точного измерения дальности до ВО, например, за счет использования просто широкополосного сигнала и последующего его сжатия при приеме эхо–сигнала.
Кроме того, аппаратура распознавания, обрабатывающая эхо–сигналы в стробах (из ограниченных областей пространства) имеет низкую пропускную способность.
Использование многочастотных сигналов (порядка 10 частот и более) дает хорошие показатели распознавания, незначительно уступающие по временным затратам рассмотренному выше методу. Разное между соседними частотами должен составлять от 3… 7 МГц. до сотен МГц.
Воздушный объект при облучении его сигналами с достаточно широким спектром эквивалентен электрическому фильтру с постоянными параметрами. Резонансные частоты фильтра определяются формой ВО и его геометрическими размерами и не зависят от радиуса. Они проявляются в отклике фильтра, т.е. в отраженном сигнале от распознаваемого ВО. При этом зондирующие сигналы РЛС должны иметь такие несущие частоты, которые бы соответствовали резонансным областям и перекрывали их. Но необходимость излучения большого количества сигналов на близких частотах и сложность алгоритма обработки эхо–сигналов вносят существенные трудности при реализации многочастотного метода распознавания.
Многочастотные сигналы в принципе можно заменить короткоимпульсными (τи=0,01… 0,03 мкс.) с достаточно широким спектром, перекрывающим диапазон резонансных частот в ответном сигнале. Реализация такого метода должна основываться на преобразовании ответного сигнала в цифровую форму. В цифровом процессоре вычисляются характеристики линейной системы (вычеты и полюсы), с помощью которой представляется радиолокационная цель. Полученные значения полюсов сравниваются с эталонными значениями. Практического применения в РЛС метод пока не получил из–за сложности его реализации.
При многочастотном зондировании из отраженных сигналов можно извлечь следующие признаки распознавания: дальностный портрет, азимутальный портрет, радиус частотной корреляции и двумерное радиолокационное изображение цели. Многочастотное зондирование совместно с методом инверсного радиолокационного синтезирования апертуры антенны позволяет формировать двумерное радиолокационное изображение воздушного объекта (повышается разрешение сигналов как по дальности, так и по азимуту). Пространственный размер объекта позволяет по этому признаку отличать его от других с высокой вероятностью.
Метод распознавания по корреляционному признаку основан на использовании отличий коэффициентов корреляции амплитуд отраженных сигналов при многочастотных зондирующих сигналах. Экспериментальные исследования для разных областей рабочего диапазона частот РЛС показали, что есть явная зависимость величины ЭПР воздушного объекта от частоты (σц(f)). При фиксированном значении ракурса цели величины σц на разных несущих частотах fi, i= 1, 2,… можно считать независимыми, если разность частот ∆fik = fi - fk достаточно велика ∆fik ≥ C/2Lц, где Lц – радиальный размер цели.
Это физическое явление в многочастотных РЛС можно использовать для уменьшения вредного влияния флюктуаций ЭПР цели на характеристики РЛС, а также в РЛС с распознаванием, основанным на измерении корреляционного признака. Коэффициенты взаимной корреляции амплитуд сигналов, отраженных от различных ВО, при многочастотном зондирующем сигнале отличаются.
В алгоритме распознавания по корреляционному признаку, например, при двухчастотном зондирующем сигнале вначале используется вычислением модуля относительно разности сигналов P = (|U1 – U2|) / (U1 + U2), где U1 и U2 – амплитуды сигналов на частотах f1 и f2. Затем величина Р сравнивается с порогом.
Исследования показали, что для самолетов стратегической и тактической авиации коэффициент взаимной корреляции при разносе несущих частот зондирующих сигналов ∆f = 6МГц. воздушных объектов (ракета, ракета - ловушка) в тех же условиях - не менее 0,9.
При условии достаточно большого времени наблюдения корреляционный признак может применяться для распознавания классов: самолет СА (Р<0,2) – самолет ТА (0,5 < Р< 0,75). Так за 5… 6 независимых обзоров, по расчетам, можно получить распознавания классов ВО типа самолет ТА – ракета – ловушка с вероятностью не ниже 0,5… 0,8, а для случая распознавания классов ВО типа самолет СА - ракета – ловушка такое же количество распознавания можно получить за 3… 4 независимых обращения. При распознавании классов ВО самолет СА – самолет ТА для достижения вероятности правильного распознавания не менее 0,8 необходимо более 12 независимых обращений к ВО.
Применение многочастотных зондирующих сигналов позволяет «разменять» количество излучаемых частот на время принятия решения при сохранении вероятности правильного распознавания.
Если число обзоров М и используется 4 частотный сигнал, то
![]()
где Uij – амплитуда отраженного сигнала на частоте fi в j-м обзоре.
Использование узкополосных сигналов более привлекательно с точки зрения практической реализации метода распознавания ВО по интенсивности отраженных сигналов (по величине средней ЭПР). Анализ ЭПР различных аэродинамических целей показывает, что контраст в ЭПР самолетов и ракет в совпадающих секторах наблюдения составляет 15… 25дБ., а самолетов СА и самолетов ТА – 0… 10 дБ. В таблице 1.2 приведены величины ЭПР в м2 различных типов аэродинамических воздушных объектов, из которой видно, что наблюдается корреляция величины σц и видимого геометрического сечения воздушного объекта.
Таблица 1.2
|
Тип воздушного объекта |
Сантиметровый диапазон |
Дециметровый диапазон |
Метровый диапазон |
|
СРЭМ |
0,02-0,2 |
0,03-0,8 |
0,1-2,5 |
|
АЛКМ |
0,1-0,4 |
0,1-1,8 |
1,0-4,8 |
|
В-1 |
10-50 |
14-100 |
35-100 |
|
В-111 |
8-11 |
7-11 |
8,5-15 |
|
В-52 |
60-120 |
27-55 |
55-120 |
|
F-4, F-15 |
6-20 |
7-20 |
10-30 |
Из анализа таблицы следует, что σ–признак целесообразно использовать для распознавания двух классов ВО – ракет от самолетов (или ложных целей), т.к. σс / σр = 10 (контраст в ЭПР).
Алгоритм принятия решения по σ–признаку заключается в сравнении с порогом Х0 накопленной по обзорам суммы амплитуд (или мощностей) сигналов, нормированных по уровню шума и приведенных к фиксированным усилению и дальности с учетом формы ДНА, угла места цели и длительности зондирующих сигналов. В случае повышения порогов принимается решение в пользу класса «самолет», в противном случае в пользу класса «ракета». Величину порога выбирают исходя из заданных вероятностей правильного принятия решений на основе априорных данных.
Метод распознавания, основанный на использовании σ–признака, по своим информативным возможностям уступает методам, основанным на применении широкополосных и многочастотных сигналов, однако он достаточно прост для технической реализации. Так, для распознавания двух классов ВО (самолет или ракета) по σ–признаку с вероятностью правильного распознавания 0,85 – 0,9 достаточно 3 – 4 обращений к ВО.
В алгоритме распознавания может использоваться и совокупность признаков, например, интенсивность сигнала (σ–признак) и корреляционный признак (р-признак). Распознавание осуществляется поэтапно. На первом этапе по σ–признаку распознается класс ВО: ракета – не ракета (самолет, ложная цель). Если принято решение «ракета», то распознавание заканчивается. Если принято решение «не ракета», то распознавание продолжается и для различения классов ВО самолет – ракета – ловушка используется р–признак. Для расчета признака р используется информация как из предыдущих, так и последующих обращений к цели. Комплексный алгоритм распознавания по сигнальным признакам (σ–признаку и р-признаку) достаточно прост при технической реализации и позволяет получить приемлемое качество распознавания за короткое время (5… 7 обращений при двухчастотном сигнале).
Распознавание ВО по поляризационным отличиям отраженных сигналов – основано на анализе поляризационных структур принимаемых эхо–сигналов. При облучении объекта сложной формы сигналом с линейной поляризацией, в отраженном эхо–сигнале присутствуют две поляризации: коллинеарная (совпадающая с поляризацией зондирующего сигнала) и перекрестная или кросс–модуляционная (ортогональная поляризация зондирующего сигнала)одуляционная с-яризацией зондирующего сигналаинейной поляризацией, в отраженном эхо - сигнале ели.ногочастотных сигналов, одна) составляющие. Для получения информации о классе ВО необходимо предусмотреть в РЛС возможность для излучения и приема сигналов раздельно с двумя разными поляризациями одновременно (например, с вертикальной и горизонтальной).
Количественной характеристикой зависимости ЭПР ВО от поляризации облучающей волны служит поляризационная матрица (или матрица рассеяния). Принцип распознавания основан на том, чтобы исследовать члены матрицы в той последовательности, которая реализуется при наблюдении за объектом. Матрицу рассеяния получают следующим образом. Электрическое поле Еотр., отраженное от ВО, представляется в виде:
![]()
где Еотр.в и Еотр.г – векторы, характеризующие электрическое поле отраженных волн с вертикальной и горизонтальной поляризациями; Епад.в и Епад.г – векторы зондирующих (падающих) волн с вертикальной и горизонтальной поляризациями;
![]() -
коэффициент отражения при i–ой
поляризации падающей волны (i
= в, г) и j–ой
поляризации отраженной волны (j=в,
г).
-
коэффициент отражения при i–ой
поляризации падающей волны (i
= в, г) и j–ой
поляризации отраженной волны (j=в,
г).
σij- ЭПР цели для соответствующей поляризации падающей и отраженной волн (i=в, г; j=в, г);
φij- изменение фазы вектора Е при отражении для соответствующей поляризации (i=в, г; j=в, г).
Тогда в матричной форме электрическое поле Еотр. можно записать в виде:
![]() .
.
Матрица вида
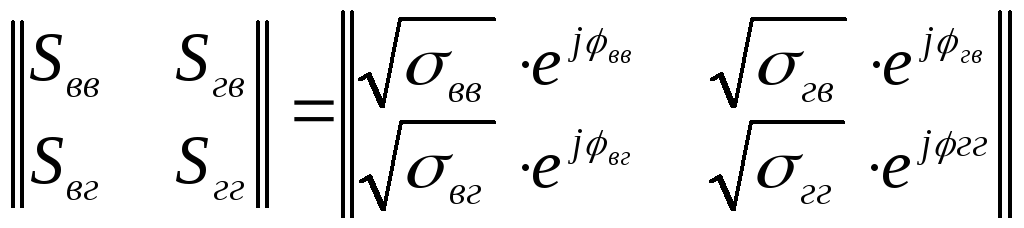
называется поляризационной матрицей.
Излучение двух сигналов с разными поляризациями волн (вертикальной и горизонтальной) и последующий анализ отраженных сигналов на четырех поляризациях (двух коллинеарных и двух перекрестных (отрогональных)) позволяет произвести сравнение соотношение амплитуд сигналов с коллинеарной и перекрестной поляризациями. По результатам анализа этого соотношения амплитуд производится распознавание классов воздушных объектов.
Для получения приемлемых результатов при решении задач распознавании требуется высокая идентичность комплексных коэффициентов передачи трактов канализации и излучения зондирующих сигналов, а также трактов приема и когерентной обработки эхо–сигналов. Точность оценки элементов поляризационной матрицы зависит от количества «обращений» к ВО.
Метод распознавания целей по модуляционным эффектам турбин и шумовой модуляции отраженного сигнала. Исследование отраженных воздушным объектом сигналов показывают, что спектры таких сигналов содержат доплеровские спектральные составляющие, вызванные вращающимися частями самолета (лопатки реактивных турбин или винтов) и непрерывный, смещенный на Fg, спектр, обусловленный движением самолета с радиальной скоростью Vr.
На Рис. 1.37, а) показаны спектр доплеровских частот, обусловленный отражениями от самолета (1) и коническим сканированием антенны РЛС (2). Рис. 1.37, б) характеризует спектр доплеровских частот, обусловленный отражениями от лопаток реактивного двигателя (1) и от корпуса самолета, т.е. планерная составляющая. Рис. 1.37, в) характеризует спектр доплеровских частот вызванный пропеллерной модуляцией (1) и отражениями от корпуса самолета (2). Кроме того, расширение спектра отраженного сигнала, происходит из–за случайных перемещений ВО (рыскание по курсу, изменения углов крена и тангажа).
«Турбинная» модуляция наблюдается на дальностях примерно 0,6… 0,7 Rмакс (Rмакс – максимальная дальность обнаружения воздушного объекта).
По характеру модуляции можно производить следующие виды распознавания: определить количество двигателей ВО; определить изменение радиальной скорости ВО; оценить наличие одного из двух ВО; распознать разворот объекта на 180˚.
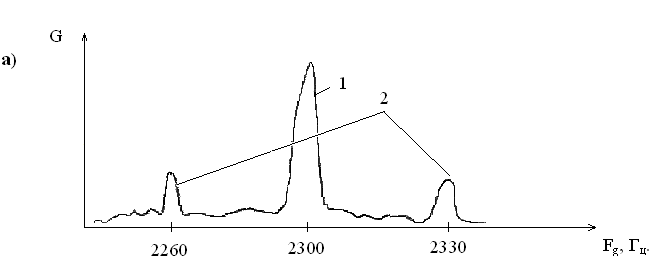
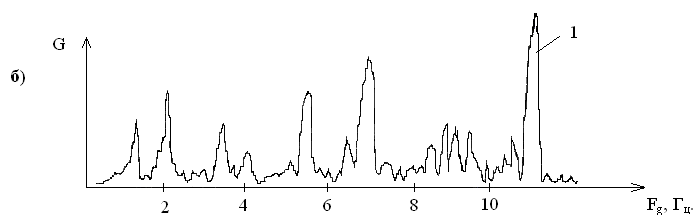

Рис. 1.37 Спектры доплеровских частот, обусловленные отражением о движущихся частей самолета
Метод распознавания ВО по модуляционным эффектам турбин более эффективен в короткой части сантиметрового диапазона волн при распознавании строев, отдельных типов целей, определении моментов запуска ракет с носителей. Реализация метода требует достаточно большого времени контакта с целью (около 50… 100мс. при Fn > 5кГц). Поэтому метод более применим в РЛС сопровождения целей и наведения.
Недостаток метода – двигатели самолетов могут работать в разных режимах и одинаковые двигатели могут стоять на разных типах самолетов. Это приводит к снижению достоверности распознавания.
Рассмотренные методы распознавания позволяют сделать вывод о том, что для создания эффективной аппаратуры распознавания требуется решить ряд важных проблем. Во-первых – это проблема обеспечения распознавания классов ВО в условиях воздействия преднамеренных и непреднамеренных помех, во-вторых – проблема повышения пропускной способности при высокой вероятности распознавания, в-третьих - расширение границ зоны распознавания до размеров зоны обнаружения.