

2.5. Способы измерения координат целей
Точность
измерения координат целей (наклонной
дальности -
![]() ,
азимута-
,
азимута-![]() ,
угла места -
,
угла места -
![]() или высоты
или высоты
![]() )
является одной из важнейших характеристик
РЛС, определяющих ее возможности при
решении задач целеуказания активным
родам войск и наведение своих истребителей.
)
является одной из важнейших характеристик
РЛС, определяющих ее возможности при
решении задач целеуказания активным
родам войск и наведение своих истребителей.
На практике обнаружение и измерение сливаются в единый процесс. Однако для простоты изучения теоретически эти процессы рассматриваются раздельно. При этом имеется ввиду, что в результате обнаружения устанавливаются факты наличия или отсутствия цели в определенных областях зоны обнаружения.
2.5.1. Измерение наклонной дальности до цели
Измерение
дальности
![]() до цели в импульсных РЛС основывается
на определении времени
до цели в импульсных РЛС основывается
на определении времени
![]() распространения радиоволн от РЛС до
цели и обратно. Другими словами необходима
фиксация моментов излучения зондирующего
сигнала и приема отраженного сигнала
и измерения временного интервала между
этими моментами. Скорость распространения
радиоволн принимается постоянной и
равной
распространения радиоволн от РЛС до
цели и обратно. Другими словами необходима
фиксация моментов излучения зондирующего
сигнала и приема отраженного сигнала
и измерения временного интервала между
этими моментами. Скорость распространения
радиоволн принимается постоянной и
равной
![]() ,
а траектория их распространения –
прямолинейной. На практике скорость
распространения радиоволн меняется с
изменением параметров среды, а реальные
траектории не являются строго
прямолинейными (имеет место их искривление,
связанное с явлением рефракции), что
приводит к ошибкам измерения.
,
а траектория их распространения –
прямолинейной. На практике скорость
распространения радиоволн меняется с
изменением параметров среды, а реальные
траектории не являются строго
прямолинейными (имеет место их искривление,
связанное с явлением рефракции), что
приводит к ошибкам измерения.
Рассмотрим процедуру измерения дальности на примере упрощенной структурной схемы импульсного дальномера (рис. 2.18).
СТР 40
---------------------------------------------------------------------- -----------------------------------------------
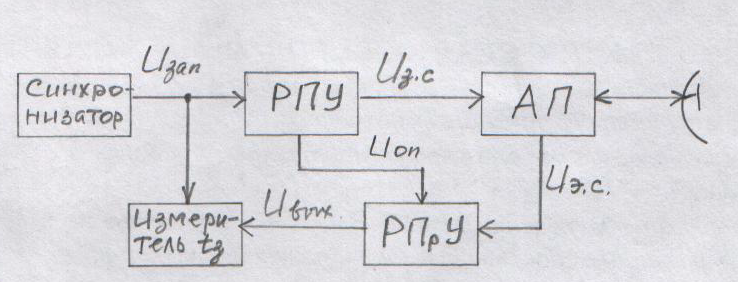
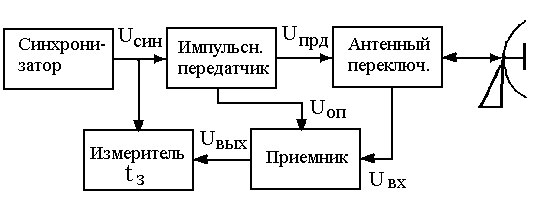
Рис. 2.18. Упрощенная структурная схема импульсного дальномера.
Импульс
синхронизации (запуска)
![]() периодически
запускает передатчик (Радиопередающее
устройство РПУ), который формирует
высокочастотный импульсный зондирующий
сигнал
периодически
запускает передатчик (Радиопередающее
устройство РПУ), который формирует
высокочастотный импульсный зондирующий
сигнал
![]() длительностью
длительностью
![]() с периодом повторения
с периодом повторения
![]() (рис. 2.19)
(рис. 2.19)
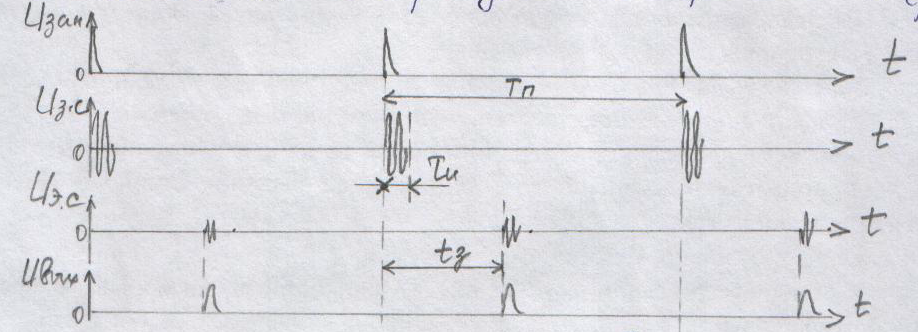
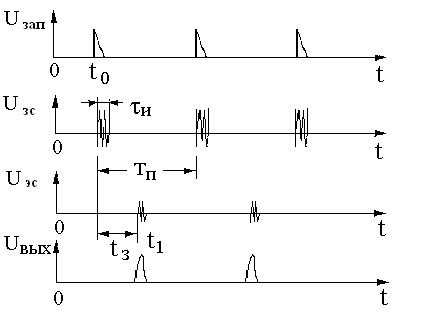
Рис. 2.19. Эпюры напряжений, поясняющие принцип измерения дальности импульсной РЛС.
Через
антенный переключатель АП зондирующие
сигналы поступают на антенну, и излучается
в пространство. Отраженный от цели
сигнал (эхо-сигнал -
![]() )
через антенну и антенный переключатель
поступает на радиоприемное устройство
РПрУ, на которое так же поступает часть
энергии зондирующего сигнала
)
через антенну и антенный переключатель
поступает на радиоприемное устройство
РПрУ, на которое так же поступает часть
энергии зондирующего сигнала
![]() для реализации защиты от пассивных
помех (в данном случае эта задача пока
не рассматривается). Радиоприемное
устройство усиливает принятый эхо-сигнал,
преобразует его на промежуточную
частоту, на которой производится основное
усиление эхо-сигнала, и выделяет огибающую
принимаемого эхо-сигнала. Можно считать,
что время запаздывания
для реализации защиты от пассивных
помех (в данном случае эта задача пока
не рассматривается). Радиоприемное
устройство усиливает принятый эхо-сигнал,
преобразует его на промежуточную
частоту, на которой производится основное
усиление эхо-сигнала, и выделяет огибающую
принимаемого эхо-сигнала. Можно считать,
что время запаздывания
![]() огибающей каждого принятого импульса
эхо-сигнала характеризует дальность
до цели (объекта отражения электромагнитной
энергии).
огибающей каждого принятого импульса
эхо-сигнала характеризует дальность
до цели (объекта отражения электромагнитной
энергии).
От
синхронизатора и радиоприемного
устройства видеоимпульсы проводятся
к измерителю времени запаздывания, где
сравниваются моменты излучения
зондирующих сигналов и приема эхо-сигналов
и определяется время запаздывания
![]() .
Для измерения времени запаздывания
.
Для измерения времени запаздывания
![]() эхо-сигнала
используется либо индикаторное устройство
(электронно-лучевая трубка), цибо цифровой
измеритель дальности. Время запаздывания
определяется выражением
эхо-сигнала
используется либо индикаторное устройство
(электронно-лучевая трубка), цибо цифровой
измеритель дальности. Время запаздывания
определяется выражением
![]() ,
а дальность до цели -
,
а дальность до цели -
![]() .
.
Определение дальности с помощью электронно-лучевой трубки производится следующим образом. На отклоняющую систему (катушки) подается ток пилообразной формы для отклонения электронного луча от центра к краю (рис. 2.20). Скорость отклонения луча пропорциональна скорости распространения радиоволн. На управляющий электрод трубки, кроме импульсов эхо-сигналов, подаются масштабные отметки дальности, которые по мере вращения развертки образуют «кольца» дальности. по положению
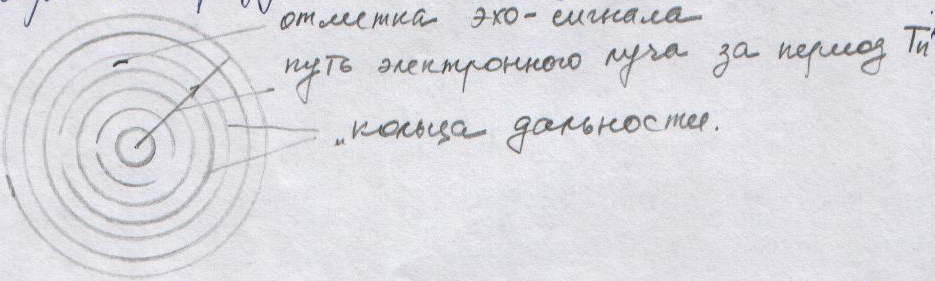

Рис. 2.20. Вид экрана индикатора кругового обзора с отметками (кольцами) дальности.
отметки эхо-сигнала относительно отметок дальности определяется дальность до цели при так называемом «визуальном» способе определения координат.
В
РЛС с цифровой обработкой сигналов
дальность действия (период повторения)
делится на дискреты дальности
![]() .
Поэтому дальность до цели определяется
соотношением
.
Поэтому дальность до цели определяется
соотношением
![]() ,
где
,
где
![]() - номер канала дальности, в котором
находится цель.
- номер канала дальности, в котором
находится цель.
СТР 41
---------------------------------------------------------------------------------------------------------------------
Упрощенная структурная схема цифрового измерителя дальности приведена на рис. 2.21.

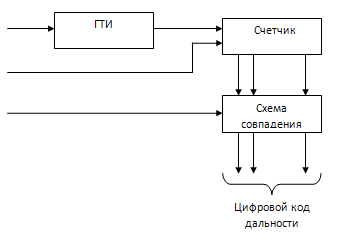
Рис 2.21. Упрощенная структурная схема цифрового измерителя дальности.
Генератор
тактовых импульсов ГТИ формирует
последовательность видеоимпульсов
коротких по длительности с частотой
![]() .
В каждом периоде повторения его работа
синхронизируется импульсами запуска
.
В каждом периоде повторения его работа
синхронизируется импульсами запуска
![]() .
Счетчик считает тактовые импульсы весь
период повторения, но в конце периода
обнуляется импульсами конца дальности
.
Счетчик считает тактовые импульсы весь
период повторения, но в конце периода
обнуляется импульсами конца дальности
![]() .
В случае обнаружения цели с обнаружением
эхо-сигналов на схемы совпадения (их
количество равно числу разрядов кода,
которым кодируется дальность) поступает
сигнал обнаружения
.
В случае обнаружения цели с обнаружением
эхо-сигналов на схемы совпадения (их
количество равно числу разрядов кода,
которым кодируется дальность) поступает
сигнал обнаружения
![]() и
цифровой код дальности поступает на
следующие устройства обработки
информации.
и
цифровой код дальности поступает на
следующие устройства обработки
информации.
При
измерении дальности по пачке отраженных
сигналов оценка дальности до цели
![]() вырабатывается
путем усреднения результатов измерения
вырабатывается
путем усреднения результатов измерения
![]() в
каждом периоде повторения
в
каждом периоде повторения
![]()
где
![]() -
число импульсов в пачке.
-
число импульсов в пачке.
Различие
значений
![]() по
одной и той же цели в пределах пачки
отраженных сигналов объясняется влиянием
шумов (помех).
по
одной и той же цели в пределах пачки
отраженных сигналов объясняется влиянием
шумов (помех).
Для повышения точности отсчета дальности целесообразно определять «центр тяжести» отсчета с учетом амплитуды отраженного сигнала (при многоуровневом квантовании аналогового сигнала),
СТР 42
---------------------------------------------------------------------------------------------------------------------
т.е. использовать все отметки амплитуд, накопленные от одной цели в течение пачки импульсов соседних дискретов дальности. Формула для определения дальности в этом случае имеет вид
![]()
где
![]() - текущий дальностный дискрет в
- текущий дальностный дискрет в
![]() канале (приемном);
канале (приемном);
![]() - амплитуда сигналов от цели, полученная
в
- амплитуда сигналов от цели, полученная
в
![]() дискрете дальности от
дискрете дальности от
![]() импульса пачки (в
импульса пачки (в
![]() периоде повторения) и
периоде повторения) и
![]() канале;
канале;
![]() -
номер дискрета дальности в одном канале;
-
номер дискрета дальности в одном канале;
![]() - номер импульса в пачке эхо-сигналов;
- номер импульса в пачке эхо-сигналов;
![]() - количество каналов обработки, по
которым пришла информация об одной цели
(для пространственно многоканальной
РЛС, в противном случае
- количество каналов обработки, по
которым пришла информация об одной цели
(для пространственно многоканальной
РЛС, в противном случае
![]() ).
).
Для
обеспечения однозначного измерения
дальности до цели необходимо, чтобы
соблюдалось условие![]() ,
а интервал однозначного измерения
дальности находился в пределах
,
а интервал однозначного измерения
дальности находился в пределах
![]() .
Отсюда следует, что для однозначного
измерения дальностей целей в пределах
от 0 до
.
Отсюда следует, что для однозначного
измерения дальностей целей в пределах
от 0 до
![]() период повторения импульсов
период повторения импульсов
![]() должен удовлетворять условию
должен удовлетворять условию
![]() .
.
Импульсный метод измерения дальностей до целей используется в большинстве РЛС РТВ. Достоинства импульсных дальномеров:
возможность построения РЛС с одной антенной на передачу и прием;
возможность одновременного измерения дальностей нескольких целей;
простота разделения излучаемых зондирующих сигналов и принимаемых эхо-сигналов;
Основным недостатком импульсного метода являются:
необходимость генерирования больших импульсных мощностей зондирующих сигналов для получения необходимой дальности действия РЛС;
СТР 43
---------------------------------------------------------------------------------------------------------------------
большая
минимальная дальность (невозможность
измерения мелких дальностей), определяемая
длительностью излучаемых импульсов и
временем протекания переходных процессов
в антенном переключателе, которая
составляет в РЛС РТВ единицы километров
(![]() ).
).
Частотный метод измерения дальности. Измерение дальности основано на частотной модуляции непрерывного излучаемого сигнала (рис. 2.22).
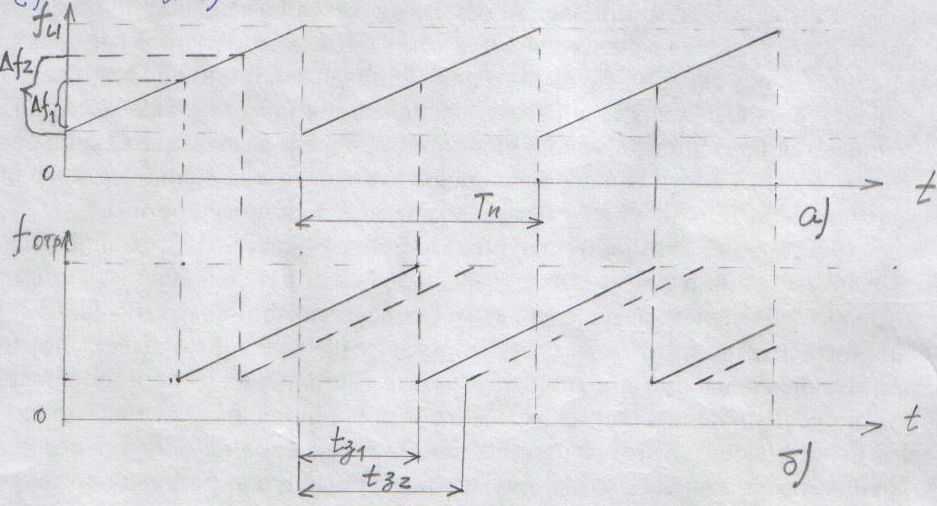

Рис 2.22. Структура непрерывного колебания с частотной модуляцией а)излучаемого сигнала и б)отраженного сигнала.
Время
запаздывания эхо-сигнала
![]() или
или
![]() пропорционально разности частот
пропорционально разности частот
![]() и
и
![]() излучаемого и отраженного сигналов.
излучаемого и отраженного сигналов.
Фазовый
метод измерения дальности основан на
измерении разности фаз импульсных
непрерывных синусоидальных колебаний
и принятых эхо-сигналов. Основная
трудность применения фазового метода
– преодоление неоднозначности измерения
разности фаз, поскольку фазометрическое
устройство позволяет измерять фазовые
сдвиги только в пределах от 0 до![]() .
Поэтому однозначное измерение дальности
также находится в пределах
.
Поэтому однозначное измерение дальности
также находится в пределах
![]() (с учетом распространения радиоволн до
цели и обратно).
(с учетом распространения радиоволн до
цели и обратно).