

4.6.3. Когерентные накопители эхо-сигналов
Когерентное накопление энергии пачки импульсов на высокой или промежуточной частоте возможно, если фазы импульсов изменяются по регулярному закону, т.е. пачка импульсов когерентна.
Схемная реализация когерентного накопителя на промежуточной частоте представлена на рис.4.32.
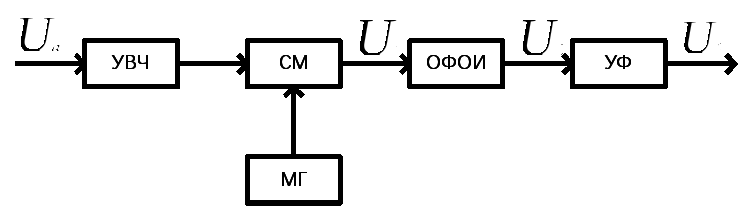
Рис.4.32. Структурная схема приемника с когерентным накоплением

Рис.4.33. Графики напряжений на элементах схемы приемника с когерентным накопителем
Здесь в качестве когерентного накопителя используется узкополосный фильтр (УФ), полоса пропускания которого должна быть обратно пропорциональна длительности пачки
![]() ,
,
где
![]() - число импульсов в пачке.
- число импульсов в пачке.
Следует
заметить, что когерентный накопитель
(рис.4.32) должен быть многоканальным по
дальности (поскольку на выходе
узкополосного фильтра колебания остаются
непрерывными в течение времени
![]() как минимум), а так же по скорости целей
(т.к. полоса пропускания УФ достаточно
малая, поэтому каждый УФ настраивается
на свою резонансную частоту
как минимум), а так же по скорости целей
(т.к. полоса пропускания УФ достаточно
малая, поэтому каждый УФ настраивается
на свою резонансную частоту
![]() ).
).
Достоинством схемы когерентного накопления (рис.4.32) является возможность разрешения целей по скорости.
К недостаткам можно отнести следующее:
1) Практическая реализация узкополосных фильтров достаточно сложна, т.к. колебательная система должна обладать высокой добротностью;
2) Для обеспечения когерентности пачки принимаемых сигналов должны представляться высокие требования к зондирующим сигналам РЛС с точки зрения стабильности несущей частоты и начальной фазы, а также к стабильности частоты местного гетеродина;
3) Схема когерентного накопителя является многоканальной по дальности и скорости.
Другим вариантом исполнения когерентного накопителя на радио (промежуточной) частоте может быть линия задержки с отводами и сумматор (рис.4.34).
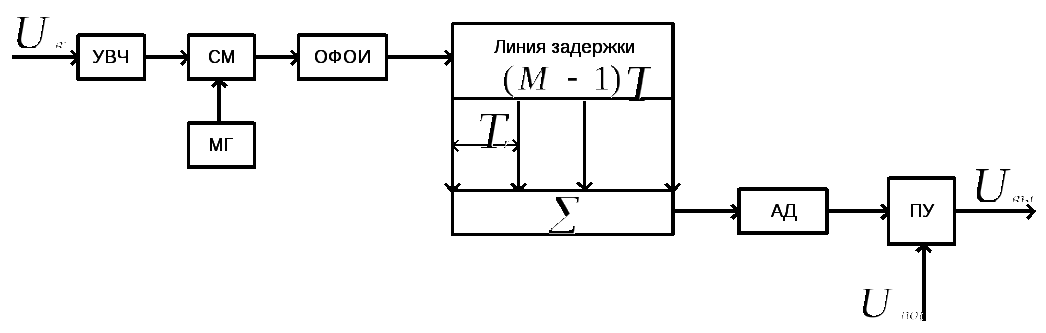
Рис.4.34. Структурная схема приемника с когерентным накопителем на линии задержки с отводами
Отклики
оптимального (согласованного) фильтра
одиночного радиоимпульса (ОФОИ) поступают
в когерентный накопитель состоящий из
линии задержки с отводами по числу
![]() импульсов в пачке и сумматора. Причем
первый отвод линии задержки реализуется
без задержки. Задержка между отводами
линии задержки должна строго соответствовать
периоду
импульсов в пачке и сумматора. Причем
первый отвод линии задержки реализуется
без задержки. Задержка между отводами
линии задержки должна строго соответствовать
периоду
![]() следования импульсов. В этом заключается
сложность практической реализации
схемы. Например, при количестве импульсов
в пачке
следования импульсов. В этом заключается
сложность практической реализации
схемы. Например, при количестве импульсов
в пачке
![]() и периоде следования
и периоде следования
![]() время задержки в линии задержки
время задержки в линии задержки
![]() достаточно велико, а точность задержки
между отводами должна быть очень высока
для обеспечения синфазного суммирования
импульсов.
достаточно велико, а точность задержки
между отводами должна быть очень высока
для обеспечения синфазного суммирования
импульсов.
В схеме также высокими остаются требования к когерентности зондирующих импульсов и к стабильности частоты местного гетеродина.
Структура огибающей сигналов в когерентном накопителе аналогична схеме некогерентного накопителя (см.рис.4.30), поэтому накопитель является одноканальным по дальности, но остается многоканальным по скорости.
Требования к точности линии задержки существенно (на два-три порядка) снижаются при накоплении энергии пачки импульсов на видеочастоте. Погрешности линии задержки в этом случае должны быть малыми по сравнению с длительностью видеоимпульса, а не периодом несущего колебания. Для преобразования радиосигнала на видеочастоту используется синхронное детектирование, позволяющее учесть регулярную связь между фазами радиоимпульсов когерентной пачки.
Синхронное детектирование осуществляется в двух квадратурных каналах с помощью фазовых детекторов (ФД) и гетеродина опорного напряжения (рис.4.35). Частота гетеродина выбирается равной ожидаемой промежуточной частоте сигнала.

Рис.4.35. Структурная схема приемника с когерентным накопителем на видеочастоте
Разность
фаз принимаемого сигнала и колебания
гетеродина опорного напряжения (ГОН)
является случайной величиной. Однако
вследствие погрешности принимаемого
сигнала эта разность фаз одинакова для
всех импульсов пачки при условии
равенства частот сигнала и ГОН. В таком
случае видеоимпульсы пачки на выходе
ФД и в отводах линии задержки имеют
одинаковую полярность. Поэтому импульсы
складываются в сумматоре (см. рис.4.36).
Амплитуда центрального импульса
выходного сигнала каждого сумматора
схемы рис.4.35 возрастает пропорционально
числу импульсов в пачке
![]() .
.
Значения
разности фаз помехи и колебания ГОН в
моменты времени, разнесенные на период
повторения
![]() ,
случайны и независимы. Поэтому амплитуды
импульсов помехи в отводах ЛЗ в отличие
от сигнала могут быть разнополярными
(см. рис.4.36, напряжение
,
случайны и независимы. Поэтому амплитуды
импульсов помехи в отводах ЛЗ в отличие
от сигнала могут быть разнополярными
(см. рис.4.36, напряжение![]() ).
При обработке помехи в сумматорах она
частично компенсируется. Расчеты,
проведенные при исследовании такого
рода накопителей, показывают, что
дисперсия (мощность случайного сигнала)
помехи в сумматоре увеличивается в
).
При обработке помехи в сумматорах она
частично компенсируется. Расчеты,
проведенные при исследовании такого
рода накопителей, показывают, что
дисперсия (мощность случайного сигнала)
помехи в сумматоре увеличивается в
![]() раз, а амплитуда в
раз, а амплитуда в
![]() раз.
раз.
В
результате отношение «сигнал/помеха»
по напряжению повышается пропорционально
в
![]() раз. Выходные сигналы сумматоров
раз. Выходные сигналы сумматоров
![]() и
и
![]() возводятся в квадрат и сигнал на выходе
накопителя будет равен (в соответствии
с требованиями математики)
возводятся в квадрат и сигнал на выходе
накопителя будет равен (в соответствии
с требованиями математики)
![]() .
.
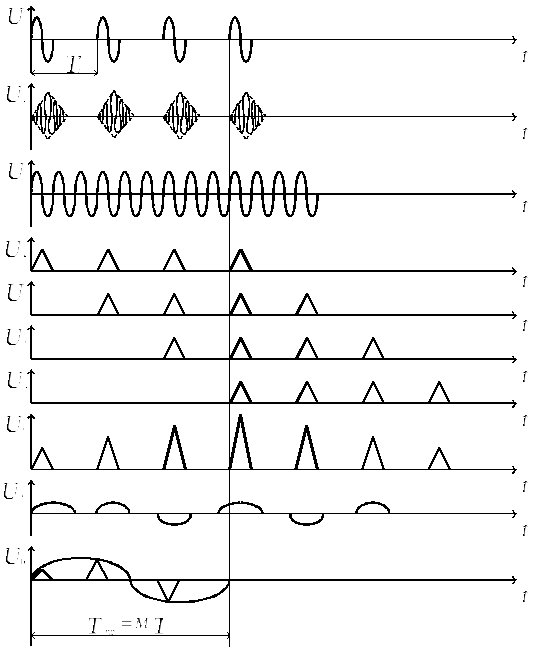
Рис.4.36. Графики напряжений на элементах схемы когерентного накопителя на видеочастоте
Ожидаемое
значение доплеровского смещения частоты
![]() должно учитываться при выборе частоты
ГОН. При движении цели с неизвестной
радиальной скоростью доплеровская
частота
должно учитываться при выборе частоты
ГОН. При движении цели с неизвестной
радиальной скоростью доплеровская
частота
![]() может отличаться от ожидаемой
может отличаться от ожидаемой
![]() .
При этом начальные фазы радиоимпульсов
принимаемого сигнала получают от
импульса к импульсу дополнительный
неучтенный сдвиг фазы
.
При этом начальные фазы радиоимпульсов
принимаемого сигнала получают от
импульса к импульсу дополнительный
неучтенный сдвиг фазы
![]() .
Вследствие этого видеоимпульсы на
выходе ФД оказываются промодулированными
по амплитуде с разностной частотой
.
Вследствие этого видеоимпульсы на
выходе ФД оказываются промодулированными
по амплитуде с разностной частотой
![]() .
Эта модуляция приводит к уменьшению
сигналов
.
Эта модуляция приводит к уменьшению
сигналов
![]() и
и
![]() в
квадратурных каналах и выходного сигнала
в
квадратурных каналах и выходного сигнала
![]() .
В этом случае, когда период разностной
частоты
.
В этом случае, когда период разностной
частоты
![]() становится равным длительности пачки
импульсов
становится равным длительности пачки
импульсов
![]() наступает взаимная компенсация
модулированных импульсов пачки в
сумматорах. Сигнал на выходе ФД для
этого случая показан на рис.4.36, напряжение
наступает взаимная компенсация
модулированных импульсов пачки в
сумматорах. Сигнал на выходе ФД для
этого случая показан на рис.4.36, напряжение
![]() .
Результат накопления сигналов на выходе
накопителя будет близок к нулю.
.
Результат накопления сигналов на выходе
накопителя будет близок к нулю.
Таким
образом, сигналы, отличающиеся по частоте
на величину
![]() ,
разрешаются по скорости. Если диапазон
возможных значений доплеровской частоты
,
разрешаются по скорости. Если диапазон
возможных значений доплеровской частоты
![]() превышает разрешающую способность, то
накопитель должен быть также многоканальным
по скорости. В каждом из
превышает разрешающую способность, то
накопитель должен быть также многоканальным
по скорости. В каждом из
![]() каналов такого накопителя ГОН настраиваются
на различные значения частоты, причем
шаг по частоте выбирается из условия
каналов такого накопителя ГОН настраиваются
на различные значения частоты, причем
шаг по частоте выбирается из условия![]() .
.
В
РЛС с когерентным накоплением сигналов
предъявляются жесткие требования к
стабильности частоты местного гетеродина
приемника, а так же СВЧ генераторов
передатчика. Уход частоты этих генераторов
приводит к модуляции амплитуд
видеоимпульсов на выходе ФД и
соответствующему уменьшению сигнала
накопителя. Относительная нестабильность
частоты не должна превышать![]() .
Поэтому когерентное накопление сигналов
применяется, как правило, в РЛС с
многокаскадным построением радиопередающего
устройства.
.
Поэтому когерентное накопление сигналов
применяется, как правило, в РЛС с
многокаскадным построением радиопередающего
устройства.