

4.6.4. Рециркуляторы. Принципы построения
Рециркуляторы,
как вид некогерентного накопителя
сигналов, нашли широкое применение в
РЛС с аналоговой обработкой сигналов.
Основными элементами рециркулятора
являются линия задержки на
![]() ,
сумматор и усилитель в цепи обратной
связи с регулируемым коэффициентом
усиления (
,
сумматор и усилитель в цепи обратной
связи с регулируемым коэффициентом
усиления (![]() )
рис.4.37.
)
рис.4.37.
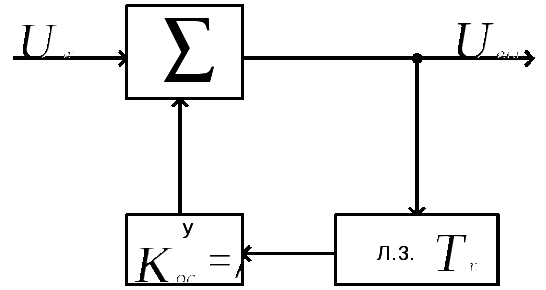
Рис.4.37. Структурная схема рециркулятора
Накопление импульсов в рециркуляторе обеспечивается в результате суммирования поступившего очередного импульса пачки с суммой импульсов, возвратившихся на вход по цепи обратной связи и полученных на предшествующих этапах работы. Выходное напряжение определяется по формуле
![]()
Коэффициент
обратной связи
![]() считаем комплексной величиной с модулем,
меньшим единицы в целях предотвращения
самовозбуждения.
считаем комплексной величиной с модулем,
меньшим единицы в целях предотвращения
самовозбуждения.
При
воздействии на вход рециркулятора
одного импульса на его выходе получается
последовательность периодически
следующих импульсов с убывающей
амплитудой, причем убывание амплитуды
тем меньше, чем ближе к единице величина
![]() .
.
Частотную характеристику рециркулятора найдем по обычной методике
![]()
Суммируя члены геометрической прогрессии, находим
![]() .
.
(Заметим,
что геометрической называется прогрессия,
в которой любой ее член равен
![]() ,
где
,
где
![]() - постоянная величина. Сумма всех членов
геометрической прогрессии (
- постоянная величина. Сумма всех членов
геометрической прогрессии (![]() )
равна
)
равна
![]() ,
,
где
![]() - число членов геометрической прогрессии.)
- число членов геометрической прогрессии.)
Переходя к нормированной амплитудно-частотной характеристике
![]() ,
,
получим
![]() .
.
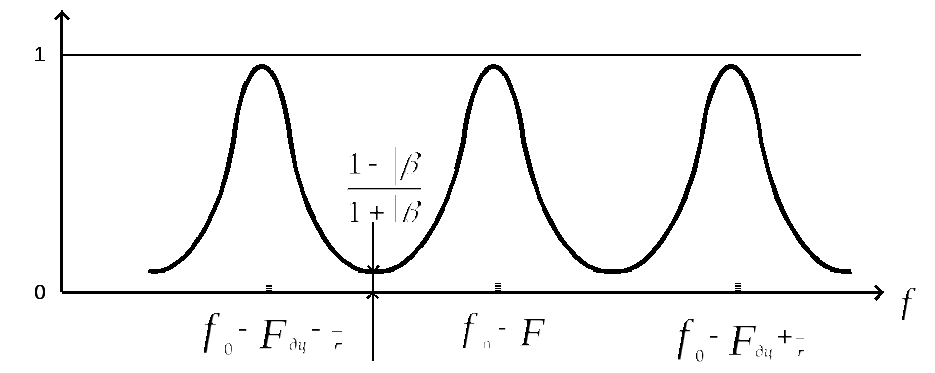
Рис.4.38. Нормированная АЧХ рециркулятора
Амплитудно-частотная
характеристика рециркулятора имеет
гребенчатую структуру (рис.4.38). Ее гребням
соответствуют частоты![]() .
Амплитуды гребней нормированы к единице.
Между гребнями АЧХ располагаются
провалы с уровнем
.
Амплитуды гребней нормированы к единице.
Между гребнями АЧХ располагаются
провалы с уровнем
![]() .
Подбор необходимой ширины гребней и
уровней провалов может быть осуществлен
за счет выбора
.
Подбор необходимой ширины гребней и
уровней провалов может быть осуществлен
за счет выбора
![]() .
Чем
.
Чем
![]() ближе к единице, тем уже гребни АЧХ, что
соответствует увеличению памяти
рециркулятора. Для оптимизации фильтрации
(накопления) ширину гребней АЧХ согласуют
с шириной гребней амплитудно-частотного
спектра пачки эхо-сигналов. Иначе, это
означает согласование длительности
импульсной характеристики рециркулятора
с длительностью пачки.
ближе к единице, тем уже гребни АЧХ, что
соответствует увеличению памяти
рециркулятора. Для оптимизации фильтрации
(накопления) ширину гребней АЧХ согласуют
с шириной гребней амплитудно-частотного
спектра пачки эхо-сигналов. Иначе, это
означает согласование длительности
импульсной характеристики рециркулятора
с длительностью пачки.
Положение
гребней АЧХ рециркулятора вдоль от
частот необходимо совместить с положением
гребней амплитудно-частотного спектра
сигнала. Последнее можно обеспечить
как за счет частотного сдвига каждой
из спектральных составляющих сигнала
(изменением периода следования сигнала),
так и за счет подбора аргумента
![]() (см. выражение для
(см. выражение для
![]() ).
).
Рассматриваемая схема (рис.4.37) не может быть, вообще говоря, оптимальной для целей, имеющих разные скорости. При изменении скорости цели изменяется положение гребней амплитудно-частотного спектра сигнала. Соответственно нужна новая настройка гребней АЧХ рециркулятора.
В качестве устройства задержки в рециркуляторах наибольшее распространение получили ультразвуковые линии задержки (УЗЛЗ) (рис.4.39)
Накопление
импульсов пачки осуществляется в
сумматоре (![]() ).
На один из его входов поступают
видеоимпульсы от амплитудного детектора
(АД) приемника через сумматор
).
На один из его входов поступают
видеоимпульсы от амплитудного детектора
(АД) приемника через сумматор
![]() и ограничитель (Огр). Включение ограничителя
перед сумматором 2 обеспечивает следующее:
единичные импульсные помехи не создают
на выходе рециркулятора заметные
отклики; сильные сигналы не выходят за
границы динамического диапазона цепей
рециркулятора. На второй вход сумматора
2 подаются видеоимпульсы с выхода
видеоусилителя (ВУС) цепи обратной
связи. Линия задержки осуществляет
задержку каждого импульса пачки на
период повторения. Кварцевый гетеродин
(Г) и модулятор (М) обеспечивают перенос
спектра интегрируемых видеосигналов
в диапазон рабочих частот УЗЛЗ.
и ограничитель (Огр). Включение ограничителя
перед сумматором 2 обеспечивает следующее:
единичные импульсные помехи не создают
на выходе рециркулятора заметные
отклики; сильные сигналы не выходят за
границы динамического диапазона цепей
рециркулятора. На второй вход сумматора
2 подаются видеоимпульсы с выхода
видеоусилителя (ВУС) цепи обратной
связи. Линия задержки осуществляет
задержку каждого импульса пачки на
период повторения. Кварцевый гетеродин
(Г) и модулятор (М) обеспечивают перенос
спектра интегрируемых видеосигналов
в диапазон рабочих частот УЗЛЗ.
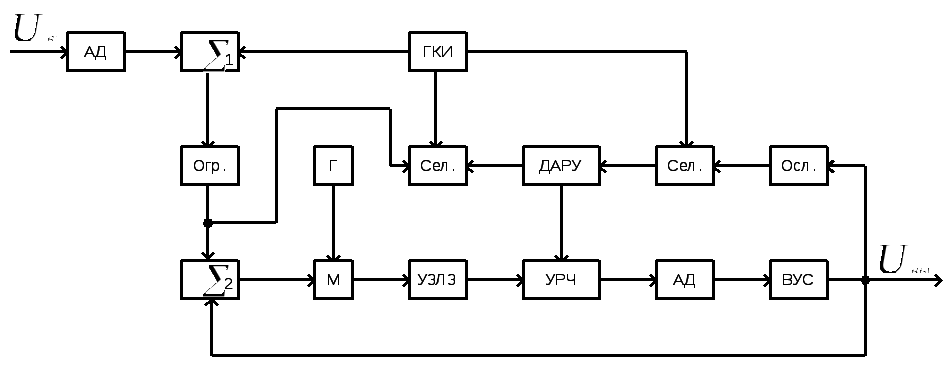
Рис.4.39. Структурная схема рециркулятора с ультразвуковой линии задержки
Усилитель радиочастоты (УРЧ) предназначен для компенсации ослабления сигнала в УЗЛЗ. В нем должны быть предусмотрены каскады, обеспечивающие возможность регулировки коэффициента усиления в заданном динамическом диапазоне с требуемой точностью. Амплитудный детектор в цепи обратной связи осуществляет обратное преобразование выходных импульсов с УРЧ в видеоимпульсы.
Для устранения возможности, как самовозбуждения, так и снижения эффективности рециркулятора применяют автоматическую регулировку усиления в цепи обратной связи. Наиболее эффективной является схема импульсной дифференциальной АРУ (ДАРУ).
Автоматическое поддержание номинального значения коэффициента обратной связи осуществляется следующим образом. Генератор контрольных импульсов (ГКИ) вырабатывает контрольные импульсы (пилот сигналы), которые поступают на один из входов схемы ДАРУ (через сумматор 1, ограничитель и селектор (сел.)). На второй вход схемы поступают эти же контрольные импульсы, задержанные в УДЛЗ.
Амплитуда
входного контрольного видеоимпульса
сравнивается с амплитудой ослабленного
в
![]() раз контрольного импульса в цепи обратной
связи (
раз контрольного импульса в цепи обратной
связи (![]() - номинальное значение коэффициента
обратной связи). При нормальной работе
рециркулятора амплитуды импульсов
одинаковы. Отклонение коэффициента
обратной связи от номинального значения
изменяет величину накопленного сигнала,
поэтому равенство амплитуд нарушается.
Схема ДАРУ при этом вырабатывает
соответствующее напряжение для изменения
коэффициента усиления УРЧ.
- номинальное значение коэффициента
обратной связи). При нормальной работе
рециркулятора амплитуды импульсов
одинаковы. Отклонение коэффициента
обратной связи от номинального значения
изменяет величину накопленного сигнала,
поэтому равенство амплитуд нарушается.
Схема ДАРУ при этом вырабатывает
соответствующее напряжение для изменения
коэффициента усиления УРЧ.
Схема ДАРУ производит сравнение амплитуд контрольных сигналов в специально выделенном временном интервале (как правило, в конце дистанции) свободном от действия выходных сигналов приемника. Временной интервал выделяется путем подачи управляющих импульсов на временные селекторы (Сел.) в моменты поступления на вход рециркулятора контрольных импульсов.
Следует заметить, что при реализации рециркулятора по схеме (ри.4.39), т.е. на видеочастоте после амплитудного детектирования накопление сигналов становится одноканальным по дальности и по скорости. Амплитудно-частотная характеристика рециркулятора принимает вид (рис.4.40).
 Рис.4.40.
Амплитудно-частотная характеристика
рециркулятора на видеочастоте
Рис.4.40.
Амплитудно-частотная характеристика
рециркулятора на видеочастоте
Обеспечение устойчивости является одной из главных мер при практической реализации рециркуляторов. Необходимое и достаточное условие устойчивости рециркулятора выполнение неравенства
![]() ,
,
где
![]() - коэффициент дополнительного ослабления
- коэффициент дополнительного ослабления
![]() -го
паразитного отражения УЗЛЗ. Уровень
паразитных отражений в УЗЛЗ достигает
величины 0,03…0,05. Поэтому уже при числе
импульсов в пачке
-го
паразитного отражения УЗЛЗ. Уровень
паразитных отражений в УЗЛЗ достигает
величины 0,03…0,05. Поэтому уже при числе
импульсов в пачке
![]() запас устойчивости рециркулятора
составляет около 0,1. Это означает, что
допустимая нестабильность коэффициента
усиления цепи задержанной обратной
связи в сторону его увеличения не должна
превышать 10% от его номинального значения.
запас устойчивости рециркулятора
составляет около 0,1. Это означает, что
допустимая нестабильность коэффициента
усиления цепи задержанной обратной
связи в сторону его увеличения не должна
превышать 10% от его номинального значения.